1.本发明涉及轨道车辆轴承道旁声学故障诊断技术领域,尤其是涉及一种轨道车辆轴箱轴承便携式道旁声学检测系统及方法。
背景技术:
2.轴箱轴承是机车走行部的重要组成部分,是发生故障概率最高的零部件之一。轴箱轴承在极端的运行环境中,突发性的损坏会造成热轴、燃轴、切轴等情况,导致重大交通事故,威胁乘客生命安全,造成重大经济损失。因此,提高轴箱轴承的使用安全性并采取一定的检测措施,将轴箱轴承故障消除在萌芽状态,是行车安全的需要。
3.目前,国内地铁车辆对轴箱轴承的监测是大部分通过对轴温的监测来实现的,常用的方法有在轴承盖上贴温度试纸以及通过安装在轨道外侧的红外传感器实现对轴承温度的测量,因此只有在轴承发热时才能探测到故障。还有一部分是运用振动检测设备对轴承进行监测,通过振动信号检测轴承,但是每个轴箱加装振动监测装置设备成本较高。而道旁声学监控系统能在轴承发生的故障早期,检测出轴承在运动的过程中产生的冲击信号,判断早期故障。目前,国内对轨道车辆轴箱轴承进行声学监测运用较为广泛的是货车滚动轴承早期故障轨边声学诊断系统(trackside acoustic detection system)。tads技术的检测方式是通过在轨道内部安装磁传感器进行车辆测速以及声传感器触发,声学传声器阵列放置在道旁的保护箱内,为固定监测设施。
4.tads技术轨道一侧设有六个传声器,每一个传声器采集轴承一个周期内的部分信号,再将每个传声器信号剪切、校准获得轴承的全周期信号,且为了获得高质量的声源信号,传声器距离轨旁距离较近,每个传声器之间的间距较大,tads技术采用的传声器个数少、间距大,当有单个传声器产生故障时,就会分析出错误的结果。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种轨道车辆轴箱轴承便携式道旁声学检测系统及方法。
6.本发明的目的可以通过以下技术方案来实现:
7.一种轨道车辆轴箱轴承便携式道旁声学检测系统,该监测系统包括:
8.红外线传感器装置:包括两对分别设置在轨道两侧的红外传感器,用以在轨道车辆双向经过时作为车速检测的触发器;
9.传声器阵列装置:包括一对设置在轨道两侧的折叠式传声器阵列,轨道每侧的折叠式传声器阵列位于两个红外传感器之间,用以采集轴箱轴承的声信号;
10.机器视觉速度检测装置:包括设置在轨道一侧的折叠式传声器阵列上的工业相机,用以在车速检测触发后拍摄车辆图像,进而获取车辆速度信息;
11.数据采集处理装置:分别与红外线传感器装置、传声器阵列装置和机器视觉速度检测装置连接,用以采集数据并进行故障检测。
12.所述的折叠式传声器阵列包括采用铝合金材料制成的传声器阵列支架以及并列等距安装在传声器阵列支架上用以采集轴承全周期声信号的多个传声器,,所述的折叠式传声器支架的中部设有用以开合折叠收起的转轴,所述的转轴下方通过紧固件螺丝固定在伸缩三脚架上,伸缩三脚架上开设一定位孔,所述的定位孔内垂直插入红外激光笔且当打出的光点在钢轨的上沿时固定伸缩三脚架,以调整折叠式传声器阵列的高度,所述的折叠式传声器阵列通过水平仪调整至水平位置,并且折叠式传声器阵列的中心距离轨道平面与轴箱轴承中心的高度相等。
13.所述的数据采集处理装置包括机器视觉测速模块、声信号采集模块、轴承故障诊断模块和数据处理器;
14.所述的机器视觉速度检测模块与数据处理器连接,用以将工业相机拍摄的车辆图像通过模数转换后传至数据处理器后对轨道车辆进行测速;
15.所述的声信号采集模块与数据处理器连接,用以将传声器阵列采集到的声信号经过模数转换后发送给数据处理器进行故障特征频率提取;
16.所述的轴承故障诊断模块与声信号采集模块连接,用以根据故障特征频率判断轨道车辆轴箱轴承是否存在故障;
17.所述的数据处理器通过5g通信设备与服务器连接,用以上传数据。
18.所述的红外传感器装置包括通过支架固定在轨道一侧的第一红外传感器和第三红外传感器以及固定在轨道另一侧的第二红外传感器和第四红外传感器,所述的第一红外传感器和第三红外传感器分别与第一数据处理器连接,所述的第二红外传感器和第四红外传感器分别与第二数据处理器连接,使得在同一轨道上的轨道车辆从两个方向经过均能触发正常开机工作,并判断出车辆的行驶方向,实现双向接车。
19.该系统还包括两个户外电源,用于给整个系统供电。
20.本发明还提供一种轨道车辆轴箱轴承便携式道旁声学检测系统的检测方法,包括以下步骤:
21.步骤s1:当轨道车辆经过其中一组红外传感器时,红外传感器在检测到的距离数据发生变化后向机器视觉速度检测装置发送一个脉冲,触发工业相机开始工作;
22.步骤s2:工业相机定位轴箱进行拍摄,通过机器视觉速度检测模块计算车速,并将车速信息通过5g通信设备传输给服务器;
23.步骤s3:传声器阵列采集车辆轴箱轴承声信号,采集到的信号传输到数据采集处理装置进行处理,并通过5g通信设备发送给服务器,在工业相机拍摄范围内能提取到轴箱轴承盖时,轴箱轴承在工业相机画面内会停留一段时间,数据采集处理装置对该段时间内的声信号数据进行截取并传输到故障诊断模块;
24.步骤s4:故障诊断模块接收到截取轴箱轴承声信号数据后对轴承进行故障判断,形成故障报文并融合车辆速度信息通过5g通信设备传至服务器。
25.所述的步骤s2中机器视觉速度检测模块进行速度检测的过程具体为:
26.步骤s201,当轨道车辆通过一组红外传感器时,红外传感器装置触发系统开始工作,工业相机开始连续拍摄多张照片;
27.步骤s202,图像采集卡接收模拟图像信号通过模数转换将其数字化,或直接接收相机数字化后的数字视频数据;
28.步骤s203,将数字图像传输至数据处理器对图像进行处理和识别,获得测量数据;
29.步骤s204,利用边缘检测算法,提取出每张图片的轴箱轮廓并识别出轮廓的中心,建立坐标系将轴箱轮廓中心定位,根据每张图片轮廓中心坐标计算车速,速度信息数据通过数据处理器上的显示屏显示,并将速度信息上传至服务器。
30.所述的步骤s4中的故障诊断模块进行故障诊断的过程具体为:
31.步骤s401,截取轴箱轴承声信号数据;
32.步骤s402,采用延时求和波束形成算法,对收集到的各个传声器输出信号进行加权求和及滤波,最终输出期望方向的声信号,形成一个波束;
33.步骤s403,对形成波束后的信号进行包络,判断是否出现轴承故障特征频率,由此判断轴箱轴承是否存在故障;
34.步骤s404,若存在故障则形成故障报文,融合车辆速度信息传至服务器。
35.所述的步骤s402中的延时求和波束形成算法将从轴箱轴承传来的远场平面波形成一个波束,在每个传声器接收信号之前增加一个延时,使来自轴箱轴承方向的声信号在求和之前对齐,抑制非目标方向的干扰信号,增强目标方向的声信号,以采集到更加准确的轨道车辆轴箱轴承声信号。
36.所述的步骤s3中数据采集处理装置的数据采集与处理过程具体为:
37.步骤s301,当无列车通过时,系统处于待机状态,待机状态下只对四个红外传感器的信号进行实时数据采集和处理;
38.步骤s302,当有轨道车辆即将经过时,其中一组红外传感器采集到的数据会发生变化,从而可以确定来车方向,并触发整个系统开始数据采集工作;
39.步骤s303,工业相机开始连续拍摄多张照片,传声器阵列装置采集声信号;
40.步骤s304,图像采集卡接收模拟图像信号通过模数转换将其数字化,声信号采集模块将采集到的声信号经过a/d转换为数字信号,然后发送给数据采集处理装置的数据处理器进行数据处理与分析,数据处理器处理采集到的声信号数据以及得出车辆瞬时速度数据,再通过5g通信设备发送给服务器;
41.步骤s305,工业相机拍摄到轴箱轴承盖,提取出轴承盖的圆心时,开始截取轴箱轴承声信号数据,当轴承盖离开工业相机拍摄范围时,停止截取数据,轨道车辆通过另一组红外传感器时,将截取的数据传至故障诊断模块。
42.与现有技术相比,本发明具有以下优点:
43.一、本发明使用的传声器阵列比单个传声器有更好的指向性,由传声器阵列在期望方向上产生主波束,便于更加准确的采集到轨道车辆轴箱轴承的声信号,利用波束形成技术降低了噪声干扰,提高了声信号的信噪比。
44.二、本发明可对轨道车辆行驶过程中轴承故障进行检测,当发生轴承故障时可通知检修部门,及时对故障进行处理,减小了故障引起的安全隐患,对我国铁路安全运行具有重要的意义。
45.三、本发明设计的便携式轴承道旁声学检测装置是可移动的,并且整套系统方便携带,所有设备可存放在一个32寸的拉杆箱内;触发以及测速模块不需要侵入车辆限界,不需要在轨道内部安装任何设备,可以根据实际情况来改变检测的轨道,实现了多条地铁线路共用一套检测设备,降低检测成本。
附图说明
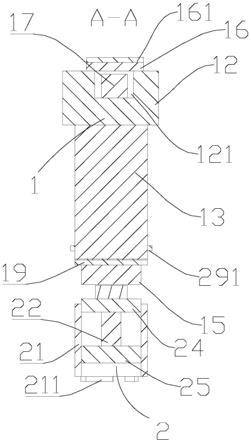
46.图1为折叠式传声器阵列的结构示意图;
47.图2为延时求和波束形成空间滤波器示意图;
48.图3为机器视觉速度检测模块示意图;
49.图4为道旁声学监测模块结构组成示意图;
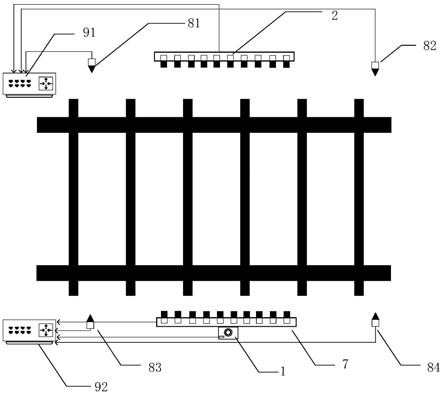
50.图5为道旁监测系统布局示意图;
51.图6为数据采集存储模块流程图;
52.图7为故障诊断模块流程图;
53.图8为平面波模型图。
54.图中标记说明:
55.1、工业相机,2、第一传声器阵列,21、传声器阵列支架、31、第一传声器,32、第二传声器,33、第三传声器,34、第四传声器,35、第五传声器,36、第六传声器,37、第七传声器,38、第八传声器,39、第九传声器,310、第十传声器,4、定位孔,5、伸缩三脚架,6、地面,7、第二传声器阵列,81、第一红外传感器,82、第二红外传感器,83、第三红外传感器,84、第四红外传感器,91、第一数据处理器,92、第二数据处理器。
具体实施方式
56.下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
57.实施例
58.本发明提供了一种轨道车辆轴箱轴承便携式道旁声学检测系统,如图1所示,本例中的折叠式传声器阵列总长度为1m,宽4cm,厚3cm,为了获得较高的分辨率,设置10个传声器,阵元间距为10cm,阵列中心设置转轴,阵列可在完成测试后沿着此转轴折叠收起放入行李箱内,和门的结构类似,转轴的上半部分通过铰链或合页连接阵列的左半部分和右半部分,用于相互折叠,下半部分是螺纹,用于和螺母相连进行固定,安装在伸缩三脚架上,选择铝合金作为阵列的材料,尽量减轻阵列重量,在距离阵列中心40cm下方的伸缩三脚架上留有一个红外激光笔的定位孔,测试时将红外激光笔垂直插入定位孔内,调整高度,使激光笔打出的光点正好打在钢轨的上沿,此时再固定伸缩三脚架,用水平仪调整传声器阵列至水平位置。
59.图2为延时求和波束形成空间滤波器示意图,由于传声器阵列与轴箱轴承的距离较远,因此假设从轴箱轴承传来的声波为远场平面波,远场平面波模型对于传声器接收到的声源信号,只考虑相位差距而忽略幅值差距,波束形成需要通过传声器阵列得以实现,如果将所有的传声器输出信号求和作为阵列输出结果,则当信号垂直于阵列面时,将获得最大幅度输出,因为信号是同时到达的,所有各通道之间的信号彼此增强;而当信号来自非垂直阵列面方向时,由于它们被传声器接收信号存在时间差,故输出信号幅值较小。延时求和的基本思想是利用延时求和来设计一种空间滤波器,称之为波束形成器,它无需物理移动阵列即可达到控制波束的能力。在每个传声器接收信号之前增加一个延时,使来自轴箱轴承方向的声信号在求和之前对齐,通过控制这些阵列,即可控制波束主瓣方向。
60.如图3所示,当车辆通过红外传感器时,红外传感器通过数据处理器向机器视觉速度检测模块发送脉冲,触发工业相机开始工作。车辆完全通过另一个红外传感器后,相机停止扫描,等待下一辆列车经过再开始新的图像进行采集和输出。图像采集部分接收模拟图像信号通过a/d将其数字化,或者是直接接收相机数字化后的数字视频数据。图像采集部分将数字图像传输至数据处理器中数据处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。处理结果控制的其他设备的动作、定位等。利用边缘检测算法对图像中的轴箱轴承盖进行轮廓提取,定位出轴承盖的圆心,通过轴承盖圆心位置的移动来对列车进行测速,并将速度信息上传至服务器。
61.如图4所示,本发明的道旁声学监测系统包括数据处理器、数据采集模块、故障诊断模块、两组线阵列传声器阵列、红外传感器。数据处理器负责数据的整合与处理以及将报文发送至服务器;在数据采集器上装有一个触摸屏,在测量完红外传感器距离传声器阵列中心的距离,与阵列相距较近的那根轨道距离后,需将这两个数据从触摸屏输入,四个红外传感器用于双向接车,在同一轨道上,轨道车辆既可以从左向右经过,亦可以从右向左经过,本系统可以在这两种情况下都可以正常开机工作,并判断出车辆的行驶方向。两组传声器阵列分别对位布设在铁轨的两侧,同时对两排车轮轴承进行检测,完成对轴箱轴承声信号的采集。机器视觉速度检测模块负责对车辆的轴箱拍摄图片,利用边缘检测算法提取轴承盖轮廓,通过圆心的位置变化来对车辆测速。
62.如图5所示,线性传声器阵列垂直安装在道旁两侧,每侧设置一组传声器阵列,按照满足指向性要求的方式来装配。线性传声器阵列安装在支架上,安装在距离钢轨内测大约3000mm的位置,在阵列上的各个传声器需要进行编号,这样做的目的是方便与其他设备进行连接调试。选择红外传感器作为触发传感器,因为轨道车辆在通过红外传感器时会切割红外线,产生脉冲信号,通过是否产生脉冲信号就可以判断是否有轨道车辆通过。红外传感器安装在距离阵列旁约3米处,安装时应保证红外传感器垂直对正前方,通过红外传感器判断来车方向,红外传感器装置、两组传声器阵列和工业相机均与数据处理器连接,当车辆经过时可以被红外传感器捕捉到,同时启动工业相机,定位轴箱进行拍摄,通过边缘检测算法提取轴箱轮廓再计算车速,随后将通过5g网络传输给服务器,传声器阵列采集到的信息传输到数据处理器进行处理,再通过5g通信设备发送给服务器,等轨道车辆通过另一个红外传感器时,停止数据采集,系统恢复待机状态等待下次轨道车辆到来。
63.如图6所示,数据采集处理模块采集与处理数据的过程具体为:
64.当没有列车通过时,整个系统处于待机状态,待机状态下只有四个红外传感器的信号进行实时数据采集和处理,当轨道车辆即将经过时,其中一个红外传感器采集到的数据会发生变化,从而可以确定来车方向,并触发整个系统开始工作。数据采集存储模块和工业相机,机器视觉检测模块拍摄轴箱照片,利用边缘检测技术提取轴箱轴承盖轮廓,利用轮廓的位置变化计算出车辆的瞬时速度,工业相机位于阵列中心上方,通过调焦确保工业相机镜头拍摄的轨道长度为5m,当工业相机拍摄到轴承盖,提取出轴承盖的圆心时,开始截取声信号数据,当轴承盖离开工业相机拍摄范围时,停止截取数据。等待列车完全通过另一方向的红外传感器后,将截取的数据传至故障诊断模块。
65.如图7所示,故障诊断模块对轴箱轴承进行故障诊断的过程具体为:
66.首先接收数据采集模块的轴承声信号数据,再使用延时求和波束形成算法处理数
据,随后对声信号进行包络处理,通过是否出现轴承故障特征频率来判断轴承是否存在故障,若存在故障则形成对应的故障报文,融合速度信息进行上传;若不存在故障,则不上传信息。
67.如图8所示,本发明中的传声器阵列相当于图中的x,声波以平面波的形式传来,首先到达的是阵列左侧的第一个传声器,本发明中的传声器间距为0.1m,那么第一个传声器与第二个传声器的时延为
[0068][0069]
式中c为声速,θ为平面波方向与垂直于阵列方向的夹角,且是一个与车速相关的量,声信号的采集是从红外传感器触发后开始的,数据采集器上设有一个触摸屏,将红外传感器距离阵列中心的距离和与阵列相距较近的那根轨道距离从触摸屏输入进去,红外传感器距离传声器阵列中心的距离为s,设为3m左右,以列车从左往右通过阵列为例,与传声器阵列相距较近的那根轨道距离为d,范围在3到5米之间,θ的表达式为:
[0070][0071]
式中n为采集设备的采样率,即一秒钟采集数据的次数。
[0072]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。