1.本发明属于弹丸参数辨识领域,具体涉及一种基于极限学习的弹丸气动系数 辨识方法。
背景技术:
2.火炮武器在战场中反应迅速,能够提供强大且持续的火力支援,是未来部队 联合作战的重要组成单元。获取传统高速旋转稳定弹丸准确的气动参数,对于提 高火炮射表精度、减小落点散布、增强打击精度具有重要的意义。获取弹丸气动 参数的方法主要有三种:第一种方法通过理论计算得出气动参数,第二种方法采 用风洞吹风法,第三种方法利用弹丸的自由飞行数据对弹丸的气动参数进行离线 辨识。其中,理论计算方法虽然简单,但由于模型中的未建模因素和不确定因素 导致计算结果存在一定的误差;风洞吹风法作用于弹丸模型,结果较为准确但由 于其成本较高,不能够精准地模拟高速旋转等状态,因而该方法也有缺陷;利用 弹丸自由飞行数据辨识弹丸的气动参数,不仅符合实际情况,还能根据辨识结果, 及时对弹丸进行调整,从而提高炮弹的打击精度。
3.用于参数辨识的方法通常有递推最小二乘法、递推极大似然法、卡尔曼滤波 法等。管军等人在《基于自适应混沌变异粒子群优化算法的旋转弹丸气动参数辨 识》兵工学报,2017,38(01):73
‑
80中提出一种新的自适应混沌变异粒子群算法 来求解该准则下的气动参数最优解,进而得到弹丸的气动参数,但是其在工程上 比较难以实现;史金光等人在《弹道修正弹落点预报方法研究》.弹道学 报,2014,26(02):29
‑
33.中利用扩展卡尔曼滤波法对弹道修正弹的阻力和升力符 合系数进行了辨识,并且由此对后续弹道进行了修正,然而该方法要求较高,难 以在实际应用中实现。夏智勋等人在《极大似然法辨识轴对称飞行器的气动参数》. 航空学报,1998,19(5):53
‑
55中采用分段辨识策略,利用估计法计算出辨识初 值,然后基于极大似然法成功实现了对大攻角非线性气动参数的辨识,但是该方 法计算耗时较长,不能满足实时估计的要求。
技术实现要素:
4.本发明的目的在于提供一种基于极限学习机的辨识弹丸气动参数的方法,旨 在利用弹丸的飞行数据,基于极限学习机对弹丸的气动参数进行辨识,为获取弹 丸气动参数提供了新的途径。
5.实现本发明目的的技术解决方案为:一种基于极限学习的弹丸气动系数辨识 方法,包括如下步骤:
6.步骤(1):建立弹丸二自由度动力学模型;
7.步骤(2):构建极限学习机网络模型;确定输入层节点数、隐含层神经元个 数、激活函数以及输出层节点数;
8.步骤(3):根据构建好的极限学习机网络模型,进行参数辨识;确定隐含层 和输出层的连接权值矩阵在确定连接权值矩阵的基础上,求解模型的输出 矩阵,实现参数辨
样本数据,t
j
=[t
j1
,t
j2
,
…
,t
jm
]
t
∈r
m
表示输出训练样本数据;对于隐含层神经元个 数为l,激活函数为g(x)的极限学习机,网络的输出o
j
为:
[0030][0031]
其中w
i
=[w
i1
,w
i2
,
…
,w
in
]
t
是第i个隐含层神经元和输入节点之间的连接权值, β
i
=[β
i1
,β
i2
,
…
,β
im
]
t
是第i个隐含层神经元与输出节点之间的连接权值,b
i
是第i个 隐含层神经元的阈值;随机产生w
i
和b
i
,其中w
i
·
x
j
表示矩阵的内积运算;
[0032]
网络的训练目标为即存在β
i
,w
j
,b
i
使得
[0033][0034]
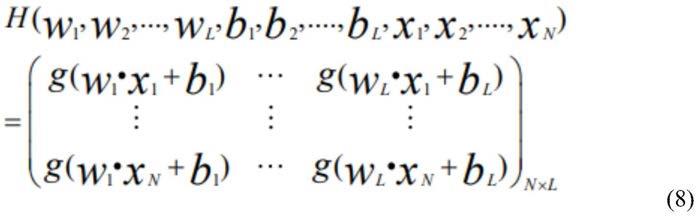
写成矩阵形式为:hβ=t其中,h是隐含层输出矩阵,β是隐含层和输出层 之间的连接权值矩阵,t是输出矩阵:
[0035][0036][0037][0038]
基于最小二乘准则求解极限学习机的输出权重其表达式为:
[0039][0040]
其中h
是隐含层输出矩阵h的moor
‑
penrose广义逆矩阵;
[0041]
在式(11)基础上,在矩阵h
t
h对角线引入正则化项改进后的输出权值 矩阵如下式所示:
[0042]
[0043]
步骤(33):网络预测,实现参数辨识:
[0044]
在训练过程结束后,得到模型的输出权值矩阵假设此时给定m个预测样 本x
k
,则对于隐含层神经元个数为l,激活函数为g(x)的极限学习机,网络的输 出u
j
为:
[0045][0046]
本发明与现有技术相比,其显著优点在于:
[0047]
(1)本发明的方法,创新地采用极限学习的方法对弹丸气动参数进行辨识; 极限学习通过随机产生输入权重以及隐含层神经元阈值,避免权值和阈值迭代更 新过程,克服了传统智能算法辨识时间长,容易陷入局部最优的问题;将该方法 应用于弹丸阻力系数辨识时,能够在高噪声情况下,精准、快速辨识弹丸阻力系 数,充分满足工程实时性和精度要求。
[0048]
(2)本发明的方法,旨在辨识弹丸的阻力系数,为了避免影响因素过多容 易存在高度共线性,影响网络收敛速度,因此基于二自由度动力学模型,以弹丸 速度u,弹道倾角θ,射程x以及飞行高度y作为输入变量,利用极限学习机辨识 弹丸阻力系数;采用二自由度动力学模型,极限学习辨识时间远低于采用四自由 度动力学模型,在20%噪声情况下,相对误差仍小于10%,辨识精度良好。
[0049]
(3)本发明的方法,考虑到不同数据之间具有不同的物理含义以及不同的 量纲,而不同的量纲会影响数据分析的结果,对原始工程数据进行了归一化处理, 将原始数据集映射到[0,1]区间内,消除了不同量纲对辨识结果的影响,并且有效 地克服了选择sigmoid函数作为激活函数,容易陷入函数饱和问题,进一步提高 了极限学习的辨识精度。
[0050]
(4)本发明的方法,针对神经网络隐含层节点数l目前无法理论推导得出, 采用了经验公式确定隐含层节点数l=9,减少了构建模型时的 工作量,并且该网络结构下的辨识精度充分满足工程需要。
[0051]
(5)本发明的方法,在求解输出权重时,引入正则化项,降低影响因素之 间的共线性,进一步提高了模型的收敛速度以及鲁棒性。
附图说明
[0052]
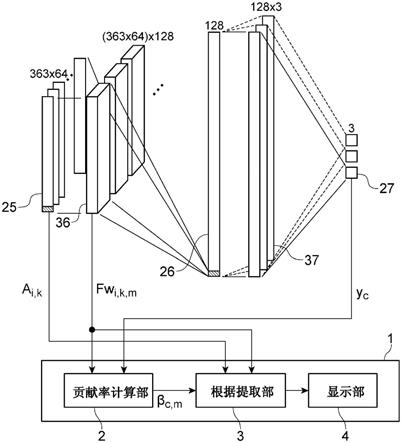
图1为本发明的为极限学习机模型结构图。
[0053]
图2为本发明辨识阻力系数的一个具体实例。
具体实施方式
[0054]
下面结合附图对本发明作进一步详细描述。
[0055]
一种基于极限学习机的辨识弹丸气动参数方法,包括以下步骤:
[0056]
步骤1:建立弹丸二自由度动力学模型:
[0057]
具体如下:
[0058]
二自由度动力学模型建立在自然坐标系下。u表示弹丸的速度,θ为弹道倾 角。x、y为弹丸的位置坐标。ρ为空气密度;s为特征面积,通常取为弹丸的最 大横截面积;m0为弹丸质量;g0为重力加速度;c
d
为阻力系数。
[0059][0060][0061][0062][0063]
步骤2:构建极限学习机网络模型:
[0064]
利用极限学习机进行弹丸气动参数辨识时,需确定输入层节点数、隐含层神 经元个数、激活函数以及输出层节点数。
[0065]
具体如下:
[0066]
(1)输入层节点数设定
[0067]
极限学习机的输入层与隐含层之间的特征映射数量是根据影响因素来确定 的。基于质点弹道方程,确定影响因素分别为弹丸速度u,弹道倾角θ,射程x以 及飞行高度y。因此最终确定网络的输入层的节点数n=4。
[0068]
(2)输出层节点数设定
[0069]
借助极限学习机实现对弹丸阻力系数c
d
的辨识,因此选定输出层的节点数 m=1。
[0070]
(3)激活函数选择
[0071]
通过对输入数据归一化处理,输入数据的大小均被映射到[0,1]区间,这与 sigmoid函数的值域刚好重合,同时克服了sigmoid函数容易陷入函数饱和问题。 在这样的情况下,选用sigmoid函数作为激活函数,模型收敛速度以及辨识精度 均优于relu函数以及tanh函数。
[0072]
(4)隐含层神经元个数设定
[0073]
对于如何确定神经网络结构中隐含层节点数目,目前还无具体方法给出确定 的解析解。但隐含层节点数会对训练时间以及拟合效果产生非常重要的影响,合 理设置隐含层节点数,可大幅度提升模型预测精度。节点数过少,模型预测精度 低;节点数过多,模型训练时间过长,并且最终的预测精度也可能因为过拟合而 下降。在参考经验公式(a通常取1~10的常数)基础上最终选定了 l=9,在该隐含层个数下网络性能表现最佳。
[0074]
步骤3:根据构建好的极限学习机网络模型,进行参数辨识
[0075]
根据神经网络的基本理论,极限学习机可看作单隐含层的前向传播神经网络, 整个网络的工作过程可分为训练过程和预测过程。网络训练过程主要任务是确定 隐含层和输出层的连接权值矩阵预测过程在确定连接权值矩阵的基础上, 求解模型的输出矩阵,实现参数辨识功能。
[0076]
步骤3
‑
1,对数据集归一化处理:
[0077]
网络的数据具有不同的物理含义以及不同的量纲,而不同的量纲会影响数据 分析的结果,为了消除不同量纲之间的影响,需要对原始数据集归一化处理。在 进行归一化处理后,能够进一步加快模型的收敛速度,提高辨识精度。采用 min
‑
max normalization归
一化法,将全部数据映射到[0,1]区间内,以输入数据为 例,归一化公式为
[0078][0079]
其中,x
j
为原始输入数据,x
min
为最小输入数据,x
max
为最大输入数据,为归一化后的输入数据。
[0080]
步骤3
‑
2,训练网络,确定输出权重:
[0081]
假设有n个任意的训练样本(x
j
,t
j
),其中x
j
=[x
j1
,x
j2
,
…
,x
jn
]
t
∈r
n
表示输入训练 样本数据,t
j
=[t
j1
,t
j2
,
…
,t
jm
]
t
∈r
m
表示输出训练样本数据。极限学习机隐含层神 经元个数l,激活函数为g(x)情况下,网络的输出o
j
为:
[0082][0083]
其中w
i
=[w
i1
,w
i2
,
…
,w
in
]
t
是第i个隐含层神经元和输入节点之间的连接权值, β
i
=[β
i1
,β
i2
,
…
,β
im
]
t
是第i个隐含层神经元与输出节点之间的连接权值,b
i
是第i个 隐含层神经元的阈值。随机产生w
i
和b
i
,其中w
i
·
x
j
表示矩阵的内积运算。
[0084]
网络的训练目标为即存在β
i
,w
j
,b
i
使得
[0085][0086]
写成矩阵形式为:hβ=t其中,h是隐含层输出矩阵,β是隐含层和输出层 之间的连接权值矩阵,t是输出矩阵
[0087][0088][0089][0090]
基于最小二乘准则求解极限学习机的输出权重其表达式为:
[0091][0092]
其中h
是隐含层输出矩阵h的moor
‑
penrose广义逆矩阵。
[0093]
在式(24)基础上,基于hoerl a e,kennard r w.在ridge regression:biasedestimation for nonorthogonal problems technimetrics,1970,12(1):55
‑
67.中提出的 岭回归原理,在矩阵h
t
h对角线引入正则化项克服了特征向量之间的高度 共线性,从而确保矩阵非奇异,进一步提高了极限学习机的泛化能力 和鲁棒性。
[0094][0095]
步骤3
‑
3,网络预测,实现参数辨识:
[0096]
在训练过程结束后,可以得到模型的输出权值矩阵假设此时给定m个预 测样本x
k
,则对于隐含层神经元个数为l,激活函数为g(x)的极限学习机,网络 的输出u
k
为:
[0097][0098]
实施例1
[0099]
下面结合实施例进行更详细的描述。
[0100]
某型号炮弹的参数设置如下表所示:
[0101]
表1 某型弹丸的参数值
[0102][0103]
在表2的初始条件下,对阻力系数c
d
进行参数辨识:
[0104]
表2 某型弹丸的发射初始条件
[0105][0106]
输入特征向量为[u θ x y]
t
,待辨识参数为弹丸阻力系数c
d
,极限学习 机网络结构为4
‑9‑
1,3100组实际工程数据,选取3000组作为训练样本,100组 作为预测样本。最终辨识c
d
的结果如图2所示,可以看出,该方法将某型弹丸运 动过程的阻力系数辨识了出来。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。