用于光传送的光学装置
1.相关申请的交叉引用
2.本技术要求于2019年1月31日提交的美国临时专利申请no.62/799,495的优先权。美国临时专利申请no.62/799,495的公开内容和整体教导内容通过引用并入本文。
技术领域
3.本公开总体涉及一种用于光传送的光学装置。
背景技术:
4.在其中存在光学路径中的相对运动的光学系统中,旋转接头和这些接头中的镜子可能用于允许光至靶向方向的偏转。通常,每个旋转接头可能提供光学路径中的仅一个运动自由度。在一些情况下,大量的旋转接头和镜子用于将光引导至靶向方向。这可能增加整个系统所需的空间,并且可能由于镜子处的多次反射而减少直至光到达靶向位置的光量。
5.因此,存在对于光学系统的需求,使得光学系统的空间可节省和/或光量的减少可受抑制。
技术实现要素:
6.本发明的一个实施例提供了一种光学装置。光学装置包括:第一光学路径和第二光学路径;光反射表面;和连杆系统。第一光学路径沿着第一光学轴线限定。第二光学路径沿着第二光学轴线限定。光反射表面限定于第一光学路径和第二光学路径之间。第一轴线和第二轴线分别限定了与反射表面的法线所成的第一倾斜角度和第二倾斜角度。连杆系统将第一光学路径和第二光学路径与光反射表面连接起来,使得在第一光学路径相对于第二光学路径移动期间,第一倾斜角度保持与第二倾斜角度相同。
7.本发明的另一个实施例提供了一种光学设备。光学设备包括:包括光源的显微镜;和光学装置。光学装置包括:第一光学路径和第二光学路径;光反射表面;和连杆系统。第一光学路径沿着第一光学轴线限定。第二光学路径沿着第二光学轴线限定。光反射表面限定于第一光学路径和第二光学路径之间。第一轴线和第二轴线分别限定了与反射表面的法线所成的第一倾斜角度和第二倾斜角度。连杆系统将第一光学路径和第二光学路径与光反射表面连接起来,使得在第一光学路径相对于第二光学路径移动期间,第一倾斜角度保持与第二倾斜角度相同。光学装置配置成引导来自光源的光。
附图说明
8.图1a至图1c示出了根据本公开的一个实施例的具有相应倾斜角度的光学系统的示意图;
9.图2和图3示出了根据本公开的一个实施例的具有相应倾斜角度的光学装置的前视图;
10.图4和图5示出了根据本公开的另一个实施例的具有相应倾斜角度的光学装置的
前视图;
11.图6和图7示出了根据本公开的另一个实施例的具有相应倾斜角度的光学装置的前视图;
12.图8和图9为根据本公开的一个实施例的具有相应倾斜角度的光学装置的相片;
13.图10为根据一个实施例的安装于六脚架上的显微镜的透视图;
14.图11为根据一个实施例的六脚架的透视图。
具体实施方式
15.根据本公开的原理的例示性实施例的描述旨在结合附图来阅读,这些附图应视为整个书面描述的一部分。在本文所公开的公开内容的实施例的描述中,对于方向或取向的任何引用仅旨在便于描述,并且非旨在以任何方式限制本公开的范围。相对术语,诸如“下部”、“上部”、“水平”、“竖直”、“之上”、“之下”、“上”、“下”、“顶部”和“底部”以及其派生词(例如,“水平地”、“向下”、“向上”等),应理解成指代如所讨论的附图中所描述或所示的取向。这些相对术语仅便于描述,并且不需要设备以特定取向进行构造或操作,除非明确地这样指示。术语,诸如“附接”、“附连”、“连接”、“联接”、“互连”等,指代一种关系,其中结构通过居间结构直接地或间接地彼此固定或附接,以及这些结构均为可移动或刚性附接或关系,除非另行明确地描述。此外,本公开的特征和益处通过参考所举例实施例进行说明。因此,本公开不应明确地限制于此类示例性实施例,这些实施例示出了特征的一些可能非限制性组合,这些特征可能单独地存在或以特征的其它组合存在;本公开的范围由本文所附的权利要求书来限定。
16.本公开描述了如目前所设想的实践本公开的一种或多种最佳模式。本描述非旨在以限制性意义来理解,但提供了本公开的实例,该实例通过参考附图仅出于说明目的而呈现以向本领域的技术人员建议本公开的优点和构造。在附图的各个视图中,类似附图标记分配给相同或相似的部件。
17.重要的是应当注意,所公开的实施例仅为本文创新教导内容的许多有利用途的实例。一般来说,在本技术的说明书中所做出的陈述非必然地限制各种所要求保护公开内容的任何内容。此外,一些陈述可能适用于一些创新特征,但不适用于其它特征。一般来说,除非另行指示,单数元件可能为复数,反之亦然,而不失通用性。
18.图1a至图1c示出了根据本公开的一个实施例的光学系统的示意图。
19.图1a至图1c所示的光学系统可能配置成允许光至靶向方向的偏转。在本实施例中,光学系统可将光传送通过自由空间,该光跟随光学机械系统的运动。在本公开中,光可包括但不限于可视光、紫外线、红外线、可视区中和可视区外的激光束、光学图像,其任何组合,以及其它类型的光。
20.图1a至图1c的系统可配置成使入射路径相对于反射路径倾斜,反之亦然。系统可能包括光学路径101和镜子102,镜子102包括反射表面103。在一个实例中,光学路径101可能包括但不限于透镜管和其它类型的光学路径。如果存在角度变化θ,那么镜子102的反射表面103因此可能需要转动θ/2以使图像或光沿着倾斜的光学轴线偏转。例如,在图1a中,镜子102的反射表面103的初始角度为45
°
。如图1b所示,当一个光学路径101倾斜角度θ1时,镜子102的反射表面103可需要倾斜β1。如图1c所示,当一个光学路径101倾斜角度θ2时,镜子
102的反射表面103可需要倾斜β2。为确保光跟随倾斜,镜子102的反射表面103可能需要倾斜一定角度,使得β1=1/2θ1,β2=1/2θ2。换句话讲,一个光学路径101的光学轴线和镜子102的反射表面103的法线之间的角度可能必须保持与另一光学路径101的光学轴线和镜子102的反射表面103的法线之间的角度相同。图2至图7视图中的下述实例可满足这样的要求。
21.图2和图3示出了根据本公开的一个实施例的光学装置的前视图。
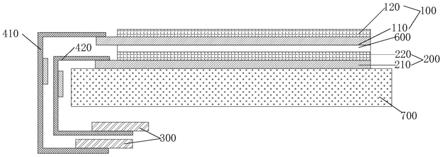
22.图2和图3的光学装置100可能包括第一光学路径11、第二光学路径12、镜子2和连杆系统3。在一个实例中,光881可能进入第一光学路径11。然后,光881可能沿着第一光学路径11行进,由镜子2反射,并且然后沿着第二光学路径12行进。然后,光881可能从第二光学路径12出射。在另一个实例中,光可能进入第二光学路径12,由镜子2反射,并且从第一光学路径11出射。第一光学路径11可能沿着第一光学轴线111限定。第二光学路径12可能沿着第二光学轴线121限定。第二光学路径12可能相对于第一光学路径11移动。镜子2可能包括反射表面21。反射表面21可能为平坦的,并且可能限定于第一路径11和第二光学路径12之间。第一轴线111和第二光学轴线121可能分别限定了与反射表面21的法线211所成的第一倾斜角度118和第二倾斜角度128。连杆系统3可能连接第一光学路径11和第二光学路径12与光反射表面21,使得在第一光学路径11相对于第二光学路径12移动期间,第一倾斜角度118保持与第二倾斜角度128相同。
23.在图2和图3的所示实例中,连杆系统3可能包括第一棒31、第二棒32、第三棒33、第四棒34、第五棒35和第六棒36。在一个实施例中,棒31
‑
34可能形成平行四边形,并且棒31
‑
32和35
‑
36可形成另一平行四边形。棒的每一者可能包括以下项的形状:例如但不限于平直形状、弯曲形状,其组合,和其它类型的形状。
24.在图2和图3中,棒31和32可枢转地连接于第一接头51处,棒33和34可枢转地连接于第二接头52处,棒31和33可枢转地连接于第三接头53处,棒32和34可枢转地连接于第四接头54处,棒35和36可枢转地连接于第五接头55处,棒34和35可枢转地连接于第六接头56处,并且棒31和36可枢转地连接于第七接头57处。
25.在所示实例中,第一接头51可能连接至反射表面21,例如但不限于反射表面21的中心处。第一光学轴线111和第二光学轴线121可能在第一接头51处且在反射表面21上交叉。第三接头53可能连接至第一光学路径11。第二接头52可能连接至第一滑动结构411。因此,第二接头52可能通过第一滑动结构411可滑动地移动。在图2至图3中,第一滑动结构411可能包括杆4111和滑动管4112。杆4111可能例如平行于或垂直于镜子2的反射表面21延伸。在所示实例中,杆4111可能连接至镜子2,并且平行于镜子2的反射表面21延伸。滑动管4112可能连接至第一滑动结构411,并且沿着杆4111为可滑动的。在其它实例(未示出)中,第一滑动结构可能包括:通道和沿着该通道可滑动的滑动块;轨道和沿着该轨道可滑动的轮;或其它类似线性滑动机构。
26.在所示实例中,第六接头56可能连接至第二光学路径12。第五接头55可能连接至第二滑动结构412。因此,第五接头55可能通过第二滑动结构412可滑动地移动。第二滑动结构412可能具有上文所讨论的与第一滑动结构411相同或类似的构造。
27.如图2和图3所示,第二接头52可能受限于第一滑动结构411,并且第五接头55可能受限于第二滑动结构412,使得棒31和32可能绕着第一接头51枢转。在所示实例中,第二接头52和第五接头55可能受限于平行于镜子的反射表面21移动。如图2至图3所示,当棒31和
32绕着第一接头51枢转时,第一光学路径11和第二光学路径12可能绕着第一接头51枢转。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51延伸至第三接头53的线711可能保持平行于从第四接头54延伸至第二接头52的线712。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51延伸至第四接头54的线713可能保持平行于从第三接头53延伸至第二接头52的线714。
28.类似于线711
‑
714,在第一光学路径11相对于第二光学路径12移动期间,从第一接头51延伸至第七接头57的线715可能保持平行于从第六接头56延伸至第五接头55的线716。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51延伸至第六接头56的线717可能保持平行于从第七接头57延伸至第五接头55的线718。
29.如所讨论的那样,成对的线711
‑
718可能保持平行,并且第一光学轴线111和第二光学轴线121可能绕着定位于反射表面21上的第一接头51枢转。因此,在第一光学路径11相对于第二光学路径12移动期间,第一倾斜角度118和第二倾斜角度128可保持相同。因此,光881不从光学路径(例如,第二光学路径12)平移或从光学路径(例如,第二光学路径12)偏离中心的机会可减少。
30.此外,因为本实施例可能限定光881的期望入射角度和反射角度而无需采用多个接头和镜子,所以可节省光学系统的空间,和/或光至靶向位置的量的减少可受抑制。
31.图4和图5示出了根据本公开的另一个实施例的光学装置的前视图。
32.图4和图5的光学装置100a可能包括第一光学路径11、第二光学路径12、镜子2和连杆系统3a。图4和图5中的光学路径11和12以及镜子2与图2和图3的那些相同或类似。在图4和图5的实施例中,连杆系统3a可能包括第一棒31a、第二棒32a、第三棒33a和第四棒34a。在一个实施例中,棒31a
‑
34a可能形成平行四边形。
33.在图4和图5中,棒31a和32a可枢转地连接于第一接头51a处,棒33a和34a可枢转地连接于第二接头52a处,棒31a和33a可枢转地连接于第三接头53a处,棒32a和34a可枢转地连接于第四接头54a处。
34.在所示实例中,第一接头51a可能连接至反射表面21,例如但不限于反射表面21的中心处。第一光学轴线111和第二光学轴线121可能在第一接头51a处、且在反射表面21上交叉。第二接头52a可能连接至滑动结构411a。因此,第二接头52a可能通过滑动结构411a可滑动地移动。在图4和图5中,滑动结构411a可能包括杆4111a和滑动管4112a。杆4111a可能例如平行于或垂直于镜子2的反射表面21延伸。在所示实例中,杆4111a可能连接至镜子2(在非限制性实例中,镜子2的底部处),并且垂直于镜子2的反射表面21延伸。滑动管4112a可能连接至滑动结构411a,并且沿着杆4111a为可滑动的。在其它实例中,第一滑动结构可能包括:通道和沿着该通道可滑动的滑动块;轨道和沿着该轨道可滑动的轮;或其它类似线性滑动机构。
35.在一个实施例中,第二接头52a可能受限于滑动结构411a,使得棒31a和32a可能绕着第一接头51a枢转。在所示实例中,第二接头52a可能受限于垂直于镜子的反射表面21移动。如图4至图5所示,当棒31a和32a绕着第一接头51a枢转时,第一光学路径11和第二光学路径12可能绕着第一接头51a枢转。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51a延伸至第三接头53a的线711a可能保持平行于从第四接头54a延伸至第二接头52a的线712a。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51a延伸至
第四接头54a的线713a可能保持平行于从第三接头53a延伸至第二接头52a的线714a。
36.在本实施例中,成对的线711a
‑
714a可能保持平行,并且第一光学轴线111和第二光学轴线121可能绕着定位于反射表面21上的第一接头51a枢转。因此,在第一光学路径11相对于第二光学路径12移动期间,第一倾斜角度118a和第二倾斜角度128a可保持相同。因此,光881不从光学路径(例如,第二光学路径12)平移或从光学路径(例如,第二光学路径12)偏离中心的机会可减少。另外,可节省光学系统的空间,和/或光至靶向位置的量的减少可受抑制。此外,图4和图5的连杆系统3a可具有相比于图2和图3的连杆系统3的简化结构。另外,连杆系统3a的棒的下部部分可能被切去以减小整体尺寸。
37.图6和图7示出了根据本公开的另一个实施例的光学装置的前视图。
38.图6和图7的光学装置100b可能包括第一光学路径11、第二光学路径12、镜子2和连杆系统3b。图6和图7中的光学路径11和12以及镜子2与图2和图3的那些相同或类似。在图6和图7的实施例中,连杆系统3b可能包括第一棒31b、第二棒32b、第三棒33b和第四棒34b。在一个实施例中,棒31b
‑
34b可能形成平行四边形。
39.在图6和图7中,棒31b和32b可枢转地连接于第一接头51b处,棒33b和34b可枢转地连接于第二接头52b处,棒31b和33b可枢转地连接于第三接头53b处,棒32b和34b可枢转地连接于第四接头54b处。
40.在所示实例中,第一接头51b可能连接至反射表面21,例如但不限于反射表面21的中心处。第一光学轴线111和第二光学轴线121可能在第一接头51b处、且在反射表面21上交叉。第二接头52b可能连接至滑动结构411b。因此,第二接头52b可能通过滑动结构411b可滑动地移动。在图6至图7中,滑动结构411b可能包括杆4111b、滑动管4112b和拱形物4113b。拱形物4113b的两个足部可能固定至镜子2。拱形物4113b可能具有狭槽以允许光穿过,并且允许光学路径11和12自由地倾斜。杆4111b可能例如平行于或垂直于镜子2的反射表面21延伸。在所示实例中,杆4111b可能连接至拱形物4113b。杆4111b可能垂直于镜子2的反射表面21延伸,例如但不限于从拱形物4113b的顶部延伸。滑动管4112b可能连接至杆4111b,并且沿着杆4111b为可滑动的。在其它实例中,第一滑动结构可能包括:通道和沿着该通道可滑动的滑动块;轨道和沿着该轨道可滑动的轮;或其它类似线性滑动机构。
41.在一个实施例中,第二接头52b可能受限于滑动结构411b,使得棒31b和32b可能绕着第一接头51b枢转。在所示实例中,第二接头52b可能受限于垂直于镜子的反射表面21移动。如图6至图7所示,当棒31b和32b绕着第一接头51b枢转时,第一光学路径11和第二光学路径12可能绕着第一接头51b枢转。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51b延伸至第三接头53b的线711b可能保持平行于从第四接头54b延伸至第二接头52b的线712b。在第一光学路径11相对于第二光学路径12移动期间,从第一接头51b延伸至第四接头54b的线713b可能保持平行于从第三接头53b延伸至第二接头52b的线714b。
42.在本实施例中,成对的线711b
‑
714b可能保持平行,并且第一光学轴线111和第二光学轴线121可能绕着定位于反射表面21上的第一接头51b枢转。因此,第一倾斜角度118b和第二倾斜角度128b可能在第一光学路径11相对于第二光学路径12移动期间保持相同。因此,光881不从光学路径(例如,第二光学路径12)平移或从光学路径(例如,第二光学路径12)偏离中心的机会可减少。另外,可节省光学系统的空间,和/或光直至靶向位置的量的减少可受抑制。此外,相比于图2至图3的连杆系统3或图4至图5的连杆系统3a,图6至图7的连
杆系统3b可能在镜子2的底部处具有更大间隙。
43.图8至图9的各自示出了根据本公开的一个实施例的光学装置的原型。特别地,图8至图9的原型基于图2至图3的光学装置100。在图8至图9中,左侧底部为激光指示器,该激光指示器生成通过第一光学路径(诸如棱镜管)的准直光束。图8至图9的图片的右侧为第二光学路径,诸如输出透镜管。在第二光学路径(诸如透镜管)的端部处,设置一片带材作为屏幕。当第二光学路径(诸如透镜管)相对于第一光学路径(诸如透镜管)倾斜时,激光点可驻留与屏幕上的相同位置(参见图9)。
44.图2至图7的光学装置100,100a和100b(其可为回转接头)的每一者可具有一个旋转自由度。角度运动的范围可能由镜子2的尺寸而进行限制。然而,光学装置100,100a和100b的每一者可与常规旋转接头、线性滑动管和/或额外回转接头进行组合以允许对于光学传送的至多六个自由度控制。根据本结构,所需镜子的数量可减少以提供光的相同自由度控制。
45.在非限制性实例中,图2至图7的光学装置100,100a和100b可用于光学设备中,该光学设备包括具有光源的显微镜。在非限制性实例中,通过使光沿着第一光学路径11和第二光学路径12行进,光学装置100,100a和100b可将光从光源引导朝向期望位置(参见图2至图7)。显微镜和/或光学装置100,100a,100b可能安装于提供六个自由度的六脚架上。安装于六脚架上的此类显微镜的一个实例示出于图10中。图11为图11所示六脚架的透视图。
46.图10示出了一个非限制性实例:显微镜安装于可调整工作台上,使得整个显微镜可移动。工作台可包括六脚架,该六脚架可提供六个自由度(参见图11)。虽然显微镜示出为安装于直立位置,但是还可能的是将显微镜安装于倒置位置或侧向或成角度位置。
47.虽然本公开已在一定篇幅和以相对于数个描述实施例的一些特殊性进行描述,但是不旨在将本公开限制于任何此类细节或实施例或任何具体实施例,而是应参考附属权利要求书来理解,以提供鉴于现有技术的此类权利要求书的最广泛可能解释并且因此以有效地涵盖本公开的预期范围。
48.本文所叙述的所有实例和条件语言旨在出于教导目的,以帮助读者理解本公开的原理和发明人为推进本领域而提出的理念;并且应理解为不限于此类具体叙述的实例和条件。此外,本文叙述本公开的原理、方面和实施例以及其具体实例的所有陈述旨在涵盖其结构和功能等同物两者。此外,此类等同物旨在包括当前已知等同物以及未来所开发等同物两者,即所开发的执行相同功能的任何元件,而不考虑结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。