1.本发明适用于无刷电机无位置传感器控制技术领域,具体而言,涉及一种无位置传感器无刷电机换相误差自适应实时修正方法。
背景技术:
2.在无刷电机无位置传感器控制系统中,为了实现电机能够平稳运行,首先需要估算转子的准确位置信息,从而实现电机精确换相。在工程应用中,为了准确检测电机转子的位置信息,一般采用相反电势法,将相反电动势过零点延迟30
°
电角度作为电机的换相点,这种方法电路结构简单、成本低,但是该方法会造成较大的换相误差,使得电机不能准确换相,而且不能满足不同灸载、不同工况下的高性能运行,尤其是负载和转速变化大的应用情况下,换相点检测和换相角补偿算法的适应性不好,会导致系统的运行鲁棒性不高。为了解决上述问题,国内外学者和工程师提出了很多基于电感和观测器的检测方法等,它们的优点是位置检测准确,但是既导致了系统算法复杂,也会让电路结构复杂化、系统响应变慢等。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供一种无位置传感器无刷电机换相误差自适应实时修正方法,本发明无需延时电路和重构中性点,再结合最小二乘法拟合出相移角与转速的关系,能够自适应实时地检测相移角并进行快速补偿,满足不同转速和负载情况下的电机准确换相,能够降低系统的转矩脉动。相比于其他方法,本发明既降低了检测电路的复杂性,也简化了换相补偿算法,能够对换相误差自适应实时进行修正,进而使得无刷电机无位置传感器控制性能更优越。
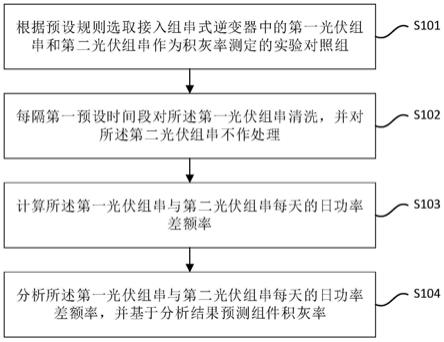
4.本发明的技术方案是:无位置传感器无刷电机换相误差自适应实时修正方法,步骤如下:
5.1)采集各相绕组电压、电流信号,根据线反电动势公式,计算出线反电动势和转速,并根据搭建的线反电动势检测电路实时解算出过零点角度;
6.2)根据转速进行换相角的自适应地实时计算,用最小二乘法拟合出相移角误差最小的换相角α;
7.3)再结合60
°-
α或者(120
°-
α)的方式进行换相补偿;
8.4)通过pwm调制获得换相角度更加准确的电压控制信号;
9.5)实现无刷电机无位置传感器控制的准确换相。
10.步骤1)中线反电动势和转速计算过程具体如下:
11.无刷电机定子三相绕组的计算公式:
[0012][0013]
式中,v
a
,v
b
,v
c
分别为三相定子端电压;r为定子相绕组,并且假设三相绕组都相等;l为定子有效电感,且假设三相电感都相等;i
a
,i
b
,i
c
为定子相电流;e
a
,e
b
,e
c
为三相反电动势。
[0014]
根据上述公式可推导出三相线反电动势的公式:
[0015][0016]
根据式(2)搭建线反电动势检测电路,实时检测线反电动势的过零点角度。
[0017]
根据线反电动势可以计算出电机当前角速度:
[0018]
ω=e
xy
/k
e
(rad/s)
ꢀꢀꢀꢀ
(3)
[0019]
进而可获得电机当前转速:
[0020]
n=60*ω/2π(rpm)
ꢀꢀꢀꢀꢀ
(4)
[0021]
式中,x和y分别为两相标号,可分别为a,b,c;k
e
为无刷电机的反电动势系数。
[0022]
步骤2)中的根据转速自适应拟合换相角α的过程如下:
[0023]
根据最小二乘法原理:设相移角与转速的关系为α=a bn,设其实际关系为由最小二乘法原理可知,如若参数a和b达到最优解,需其误差的平方和为最小即可:
[0024][0025]
由上式分别对a和b求偏导并令其为零,便可求得关于a和b方程组的最小值:
[0026]
[0027]
接下来,根据步骤3)换相补偿之后的线反电动势过零点与理论霍尔信号进行对比,可以设定无刷电机的换相信号,进而可得线反电动势过零点与导通开关管之间的关系见表1:
[0028]
表1
[0029][0030]
本发明与现有技术相比优点在于:
[0031]
(1)本发明无需延时电路,也无需重构出三相虚拟中性点,这样就显著地降低了检测电路的复杂性;
[0032]
(2)能够自适应实时地检测出相移角并进行快速补偿,能够满足不同转速和负载情况下的电机准确换相;
[0033]
(3)既简化了换相补偿算法,也能够对换相误差进行自适应实时地修正,降低了系统的转矩脉动,进而使得无刷电机无位置传感器控制性能更优越。
附图说明
[0034]
图1是本发明方法的流程图。
[0035]
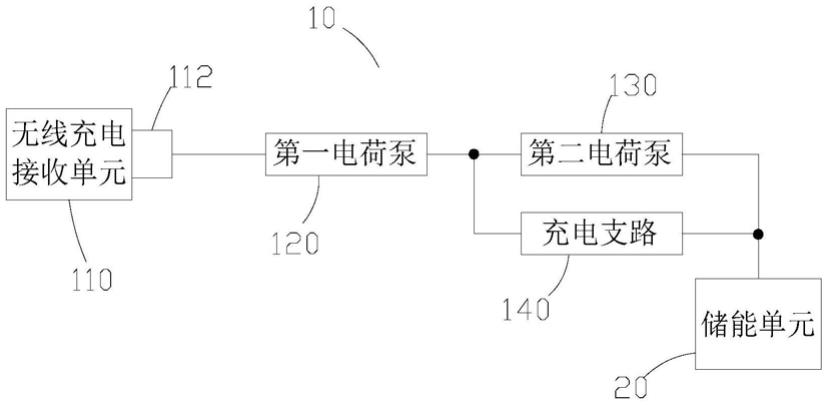
图2是应用本发明方法的无刷电机无位置传感器控制技术结构框图。
具体实施方式
[0036]
本发明解算转子位置和换相误差自适应实时修正流程见图1,应用系统结构框图见图2,具体步骤为:
[0037]
1)采集各相绕组电压、电流信号,根据线反电动势公式,计算出线反电动势和转速,并根据搭建的线反电动势检测电路实时解算出过零点角度;
[0038]
2)根据转速进行换相角的自适应地实时计算,用最小二乘法拟合出相移角误差最小的换相角α;
[0039]
3)再结合60
°-
α或者(120
°-
α)的方式进行换相补偿;
[0040]
4)通过pwm调制获得换相角度更加准确的电压控制信号;
[0041]
5)实现无刷电机无位置传感器控制的准确换相。
[0042]
步骤1)中线反电动势和转速计算过程具体如下:
[0043]
无刷电机定子三相绕组的计算公式:
[0044][0045]
式中,v
a
,v
b
,v
c
分别为三相定子端电压;r为定子相绕组,并且假设三相绕组都相等;l为定子有效电感,且假设三相电感都相等;i
a
,i
b
,i
c
为定子相电流;e
a
,e
b
,e
c
为三相反电动势。
[0046]
根据上述公式可推导出三相线反电动势的公式:
[0047][0048]
根据式(2)搭建线反电动势检测电路,实时检测线反电动势的过零点角度。
[0049]
根据线反电动势可以计算出电机当前角速度:
[0050]
ω=e
xy
/k
e
(rad/s)
ꢀꢀꢀꢀ
(3)
[0051]
进而可获得电机当前转速:
[0052]
n=60*ω/2π(rpm)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0053]
式中,x和y分别为两相标号,可分别为a,b,c;k
e
为无刷电机的反电动势系数。
[0054]
步骤2)中的根据转速自适应拟合换相角α的过程如下:
[0055]
根据最小二乘法原理:假设相移角与转速的关系为α=a bn,并假设其实际关系为由最小二乘法原理可知,如若参数a和b达到最优解,只需令其误差的平方和为最小即可:
[0056][0057]
将上式对a和b分别求偏导并令其为零,便可求得关于a和b方程组的最小值:
[0058][0059]
接下来,根据步骤3)换相补偿之后的线反电动势过零点与理论霍尔信号进行对比,可以设定无刷电机的换相信号,进而可得线反电动势过零点与导通开关管之间的关系见表1:
[0060]
表1
[0061][0062]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。