技术特征:
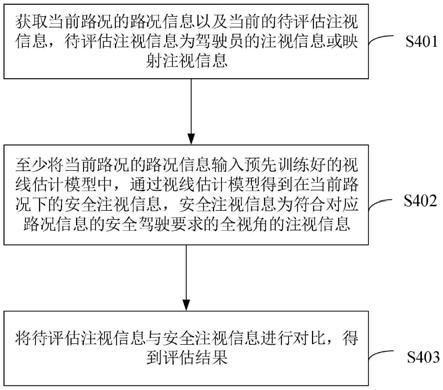
1.一种车辆驾驶的辅助方法,其特征在于,包括:获取当前路况的路况信息以及当前的待评估注视信息,其中,所述待评估注视信息为驾驶员的注视信息或映射注视信息,所述映射注视信息为将所述驾驶员的注视信息映射到当前驾驶车辆的前置摄像头的画面中的注视信息;至少将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息,其中,所述安全注视信息为符合对应所述路况信息的安全驾驶要求的全视角的注视信息,所述视线估计模型为预先至少采用多个不同路况的路况信息以及每个所述路况信息对应的安全注视信息训练得到;将所述待评估注视信息与所述安全注视信息进行对比,得到评估结果。2.根据权利要求1所述的辅助方法,其特征在于,所述将所述待评估注视信息与所述安全注视信息进行对比,得到评估结果,包括:对比所述待评估注视信息与所述安全注视信息的重合度,并根据所述重合度对所述待评估注视信息的注视质量进行评分,得到安全驾驶系数;其中,所述重合度越高,所述安全驾驶系数越高。3.根据权利要求2所述的辅助方法,其特征在于,所述得到安全驾驶系数之后,还包括:判断所述安全驾驶系数是否低于预设报警系数;若判断出所述安全驾驶系数低于预设报警系数,则向所述驾驶员发出提示信息。4.根据权利要求1所述的辅助方法,其特征在于,所述视线估计模型的训练方法,包括:获取多个不同路况的多个路况信息以及每个所述路况信息对应的安全注视信息;分别将每个所述路况信息输入所述视线估计模型中,通过所述视线估计模型计算得到所述路况信息对应的注视信息;将所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息进行对比;若对比出所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息的重合度大于预设阈值,则确定所述视线估计模型的训练完成;若对比出所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息的重合度不大于预设阈值,则调整所述视线估计模型的参数,并返回执行所述分别将每个所述路况信息输入所述视线估计模型中,通过所述视线估计模型计算得到所述路况信息对应的注视信息。5.根据权利要求4所述的辅助方法,其特征在于,所述获取每个所述路况信息对应的安全注视信息,包括:获取每个所述路况信息对应的路况下,至少一个符合安全要求的驾驶员的注视信息;将所述符合安全要求的驾驶员的注视信息,作为所述路况信息对应的安全注视信息,或者,将所述符合安全要求的驾驶员的注视信息映射到当前驾驶车辆的前置摄像头拍摄的画面中的注视信息,作为所述路况信息对应的安全注视信息。6.根据权利要求1所述的辅助方法,其特征在于,所述将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息之前,还包括:获取当前车辆的车况信息;
其中,所述至少将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息,包括:将所述当前路况的路况信息以及所述当前车辆的车况信息输入预先训练好的所述视线估计模型中,通过所述视线估计模型得到在当前路况以及当前车况下的安全注视信息;其中,所述视线估计模型为预先采用多个不同路况的路况信息、每个所述路况信息下对应的车况信息、以及每个所述路况信息、车况信息对应的安全注视信息训练得到。7.一种车辆驾驶的辅助装置,其特征在于,包括:第一获取单元,用于获取当前路况的路况信息以及当前的待评估注视信息,其中,所述待评估注视信息为驾驶员的注视信息或映射注视信息,所述映射注视信息为将所述驾驶员的注视信息映射到当前驾驶车辆的前置摄像头的画面中的注视信息;估计单元,用于至少将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息,其中,所述安全注视信息为符合对应所述路况信息的安全驾驶要求的全视角的注视信息,所述视线估计模型为预先至少采用多个不同路况的路况信息以及每个所述路况信息对应的安全注视信息训练得到;评估单元,用于将所述待评估注视信息与所述安全注视信息进行对比,得到评估结果。8.根据权利要求7所述的辅助装置,其特征在于,所述评估单元,包括:第一对比单元,用于对比所述待评估注视信息与所述安全注视信息的重合度,并根据所述重合度对所述待评估注视信息的注视质量进行评分,得到安全驾驶系数;其中,所述重合度越高,所述安全驾驶系数越高。9.根据权利要求8所述的辅助装置,其特征在于,还包括:判断单元,用于判断所述安全驾驶系数是否低于预设报警系数;提示单元,用于在所述判断单元判断出所述安全驾驶系数低于预设报警系数时,向所述驾驶员发出提示信息。10.根据权利要求7所述的辅助装置,其特征在于,还包括:模型训练单元,其中,所述模型训练单元,包括:第二获取单元,用于获取多个不同路况的多个路况信息以及每个所述路况信息对应的安全注视信息;输入单元,用于分别将每个所述路况信息输入所述视线估计模型中,通过所述视线估计模型计算得到所述路况信息对应的注视信息;第二对比单元,用于将所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息进行对比;确定单元,用于在所述第二对比单元对比出所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息的重合度大于预设阈值时,确定所述视线估计模型的训练完成;调整单元,用于在所述第二对比单元对比出所述计算得到的所述路况信息对应的注视信息与所述路况信息对应的所述安全注视信息的重合度不大于预设阈值时,调整所述视线估计模型的参数,并返回执行所述分别将每个所述路况信息输入所述视线估计模型中,通过所述视线估计模型计算得到所述路况信息对应的注视信息。11.根据权利要求10所述的辅助装置,其特征在于,第二获取单元,包括:
第二获取子单元,用于获取每个所述路况信息对应的路况下,至少一个符合安全要求的驾驶员的注视信息;映射单元,用于将所述符合安全要求的驾驶员的注视信息,作为所述路况信息对应的安全注视信息,或者,将所述符合安全要求的驾驶员的注视信息映射到当前驾驶车辆的前置摄像头拍摄的画面中的注视信息,作为所述路况信息对应的安全注视信息。12.根据权利要求7所述的辅助装置,其特征在于,还包括:第三获取单元,用于获取当前车辆的车况信息;其中,所述估计单元执行所述至少将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息时,用于:将所述当前路况的路况信息以及所述当前车辆的车况信息输入预先训练好的所述视线估计模型中,通过所述视线估计模型得到在当前路况以及当前车况下的安全注视信息;其中,所述视线估计模型为预先采用多个不同路况的路况信息、每个所述路况信息下对应的车况信息、以及每个所述路况信息、车况信息对应的安全注视信息训练得到。
技术总结
本申请提供了一种车辆驾驶的辅助方法及装置,所述方法包括:获取当前路况的路况信息以及当前的待评估注视信息,其中,所述待评估注视信息为驾驶员的注视信息或映射注视信息,所述映射注视信息为将所述驾驶员的注视信息映射到当前驾驶车辆的前置摄像头的画面中的注视信息;至少将所述当前路况的路况信息输入预先训练好的视线估计模型中,通过所述视线估计模型得到在当前路况下的安全注视信息,所述安全注视信息为符合对应所述路况信息的安全驾驶要求的全视角的注视信息,所述视线估计模型为预先至少采用多个不同路况的路况信息以及每个所述路况信息对应的安全注视信息训练得到;将所述待评估注视信息与所述安全注视信息进行对比,得到评估结果。得到评估结果。得到评估结果。
技术研发人员:王云飞
受保护的技术使用者:北京七鑫易维信息技术有限公司
技术研发日:2020.04.27
技术公布日:2021/10/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。