1.本发明涉及一种平移误差探测方法,具体涉及一种卷积神经网络平移误差探测方法。
背景技术:
2.近年来,随着天文观测的分辨率要求越来越高,对望远镜口径的要求也达到了10m级。而单一口径望远镜随着口径的增大,对制造工艺要求急剧增加,且造价很高。因此,自上世纪七十年代开始,科研人员突破单一孔径望远镜系统的设计理念,提出使用合成孔径技术来满足大口径天文望远镜的需求,以保证在有效减小制造成本和对工艺水平的要求下,保证系统的成像质量。然而,合成孔径望远镜在轨展开后各个子镜间存在倾斜误差(tilt)和平移误差(piston),这会使得成像质量大大下降。其中,倾斜误差通过精共焦、精共相阶段可以得到很好的矫正,而平移误差往往会超出一般精共相方法的探测范围,需添加必要的粗共相阶段作为过渡。
3.基于此,国内外的科研人员提出了众多用于粗、精共相阶段的方法。如,用于粗共相阶段的宽带法、基于色散条纹传感器(dispersed fringe sensor,dfs)的一系列方法,及用于精共相阶段的窄带法、相位差法(phase diversity,pd)、四棱锥检测法(pyramid)、干涉法等。但这些方法由于检测精度和范围的原因,往往需要联合使用,因此需要不同的装置来检测矫正平移误差,如通过色散条纹传感器完成粗共相探测后再使用pd法进行精共相探测,不能完成进行大范围、高精度的探测。
4.2017年,光电所李杨提出一种基于色散条纹图像累加的左峰减右峰法(dfa
‑
lsr),此方法将色散条纹图像沿着色散方向累加,用累加后信号的左峰值与右峰值之差与平移误差之间的线性关系进行探测。由于对整个色散条纹进行累加,导致带宽很大,相干长度很小,故该方法的精度虽然高,但检测范围却只能达到一个波长。
技术实现要素:
5.针对背景技术中提到的现有的dfa
‑
lsr方法存在检测范围只能达到一个波长的问题,本发明提出了一种卷积神经网络平移误差探测方法。
6.本发明的具体技术方案是:
7.提供了一种卷积神经网络平移误差探测方法,包括以下实施步骤:
8.步骤1:初始图像采集:
9.步骤1.1:设定平移误差间隔δ;多个波长通道的选定与平移误差的间隔δ相关:当有n个波长通道时,每个波长通道与平移误差的间隔δ之间需满足λ
i
=m
i
δ,其中1<i≤n,m
i
为整数;
10.步骤1.2:在任意波长通道λ
i
内,通过以平移误差间隔δ调节平移误差进行成像,在λ
i
通道内,采集n
i
=λ
i
/δ 1张图像;调节范围为:当n
i
为奇数时[
‑
λ
i
/2,λ
i
/2],当n
i
为偶数时[
‑
(λ
i
δ)/2,(λ
i
‑
δ)/2];
[0011]
步骤2:建立训练集;
[0012]
步骤2.1:按照dfa
‑
lsr的叠加原理将每个波长通道图像进行累加,从而获得每个波长通道的一个波长内的平移误差对应的lsr值序列,作为原始数据集;
[0013]
步骤2.2:根据原始数据集,分别建立对应于正、负平移误差范围的训练集;
[0014]
步骤2.3:将正平移误差范围的训练集和负平移误差范围的训练集首尾相接,并在两个训练集之间加入平移误差为零时对应的lsr值,从而构成训练集;
[0015]
步骤3:建立神经网络;
[0016]
建立神经网络包括net1和net2;
[0017]
net1网络结构包括一个输入层、一个隐含层和一个输出层,其隐含层仅有三个节点;net1用于拟合单个通道的一个波长内的平移误差值与相应lsr值的关系,其输入为单个通道一个波长内的平移误差对应的lsr值,形式为输出为lsr值对应的平移误差值;
[0018]
net2网络结构采用resnet18网络的一部分,共有11层,输入为n
×1×
1的lsr特征向量,输出为lsr特征向量对应的平移误差区间;其中,net2的输出层的相邻节点间的间隔为net1选定的波长通道的一个波长距离,即λ
i
;
[0019]
步骤4:训练神经网络;
[0020]
步骤4.1:net1的训练过程
[0021]
将任意单个通道一个波长内平移误差对应的lsr值输入至net1中得到一个波长内平移误差与lsr值的对应关系;
[0022]
步骤4.2:net2的训练过程
[0023]
将步骤2获得的训练集输入至net2中,得到lsr特征向量与平移误差区间的对应关系;
[0024]
步骤5:平移误差探测
[0025]
步骤5.1:在成像系统中设定平移误差值后,进行多通道成像,得到n个通道图像;通过dfa
‑
lsr方法获得每个通道图像的lsr值,组成n
×
1的多通道lsr特征向量,记为
[0026]
步骤5.2:
[0027]
将net1训练时采用通道的lsr值输入net1,得到结果o1;同时向net2输入步骤4.1中获得的特征向量得到结果o2;
[0028]
最终获得平移误差为:
[0029]
piston_detected=o2*λ
i
o1。
[0030]
进一步地,上述步骤2.2的具体实施过程为:
[0031]
a:建立正平移误差范围的训练集;
[0032]
a1:当任意通道λ
i
中lsr值序列的序列长度为奇数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的前半序列整体移动至后半序列之后组成新的lsr值序列;
[0033]
a2:当任意通道λ
i
中lsr值序列的序列长度为偶数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之前的序列值作为前半序列整体移动至后半序列之后组成新的lsr值序列;
[0034]
a3:将步骤a1或步骤a2获得的新的lsr值序列正向循环排列;
[0035]
a4:对所有通道执行步骤a1
‑
a3,从而获得正平移误差范围的训练集;
[0036]
b:建立负平移误差范围的训练集;
[0037]
b1:当任意通道中lsr值序列的序列长度为奇数时,去掉lsr值序列中最后一个lsr值,然后将剩余lsr值序列的后半序列整体移动至前半序列之前组成新的lsr值序列;
[0038]
b2:当任意通道中lsr值序列的序列长度为偶数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之后的序列值作为后半序列整体移动至前半序列之前组成新的lsr值序列;
[0039]
b3:将步骤b1或步骤b2获得的新的lsr值序列逆向循环排列;
[0040]
b4:对所有通道执行步骤b1
‑
b3,从而获得负平移误差范围的训练集。
[0041]
进一步地,上述步骤5中所述成像系统包括单色仪、扩束镜、分光棱镜a,分光棱镜b、d型反射镜a、d型反射镜b,干涉区域选择光阑,六足平移台,压电陶瓷促动器、成像透镜以及cmos图像传感器;
[0042]
d型反射镜a、d型反射镜b、干涉区域选择光阑、压电陶瓷促动器及六足平移台组合成为拼接镜单元;
[0043]
单色仪、扩束镜、分光棱镜a、分光棱镜b、成像透镜、cmos图像传感器则组合成为成像测量单元;
[0044]
所述拼接镜单元中,d型反射镜a被固定,d型反射镜b通过支撑结构固定在压电陶瓷促动器及六足平移台上,d型反射镜a、d型反射镜b之间存在前后位置光程差,干涉区域选择光阑紧挨两个反射镜;
[0045]
所述成像测量单元中,单色仪发出的光通过扩束镜后变为平行光入射,被分光棱镜a及分光棱镜b转入拼接镜系统,在拼接镜系统中根据d型反射镜a、d型反射镜b之间的前后位置光程差获得相位差之后再进入cmos图像传感器上。
[0046]
进一步地,上述成像系统为色散条纹传感器系统。
[0047]
本发明的有益效果在于:
[0048]
1.本发明的方法在dfa
‑
lsr方法的原理基础上,引入了多波长通道来获得lsr特征向量,从而很大程度地拓宽了dfa
‑
lsr方法的探测范围,同时继承了dfa
‑
lsr方法的抗噪性和高精度。
[0049]
2.本发明的方法通过神经网络来分辨lsr特征向量从而实现平移误差的探测,并通过一个波长内数据建立大的训练数据集,解决了传统利用神经网络来探测平移误差方法中大训练数据集难以获取的问题,确保了后续通过神经网络进行平移误差探测时的探测精度。
[0050]
3.本发明的方法既可使用简单装置进行平移误差探测,也可集成在色散条纹传感器(dfs)上进行探测,适用性强。
附图说明
[0051]
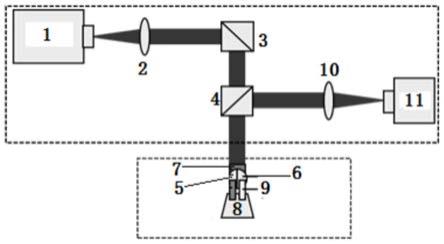
图1为成像系统的结构原理图。
[0052]
图1的附图标记如下:
[0053]1‑
单色仪、2
‑
扩束镜、3
‑
分光棱镜a、4
‑
分光棱镜b、5
‑
d型反射镜a、6
‑
d型反射镜b、7
‑
干涉区域选择光阑、8
‑
六足平移台、9
‑
压电陶瓷促动器、10
‑
成像透镜、11
‑
cmos图像传感
器。
[0054]
图2为平移误差50μm时660nm通道的像面强度分布。
[0055]
图3为平移误差为50μm时5个通道图像叠加过程。
[0056]
图4为神经网络的架构图;其中(a)为net1的架构图,(b)为net2的架构图;
[0057]
图5为cnn
‑
multi
‑
lsr方法与dfs结合使用时的装置结构图。
[0058]
图6为在
‑
146.4953μm平移误差对应的色散条纹图案上lsr特征向量的提取过程。
[0059]
图7给出了与dfs联合探测时
‑
165μm的平移误差成像结果,分别为无噪声、snr为10、15、20时各个通道的成像结果。
具体实施方式
[0060]
由于左峰减右峰的差值与一个波长内平移误差之间的线性关系在单色光入射时依然存在,且在单色光入射时,此差值会随着平移误差的增大不断循环,这也被称作2π的模糊性。基于此,本发明的方法引入多个波长通道,利用各个波长通道内lsr值的循环周期不同来构成lsr特征向量。随后使用神经网络对lsr特征向量进行识别,完成对平移误差的探测。在此过程中,本发明还利用一个波长内数据来构建大训练数据集,该训练数据集的建立解决了传统神经网络方法探测平移误差时的大范围训练集难以获取的问题。最终,本方法实现了大范围、高精度的平移误差探测,且该方法具有强的抗噪性。
[0061]
本发明的方法主要包括四个过程:建立训练集,创建神经网络模型,训练神经网络以及平移误差探测。
[0062]
1、建立训练集过程
[0063]
本发明提出多通道单色光成像来突破常见的精共相方法中的2π模糊问题,获得大的探测范围的同时保证了探测精度。在使用神经网络来探测平移误差的方法中,探测范围的大小往往决定于训练集所覆盖的平移误差范围,进而决定于训练集的大小。而通过实际采集图像来获得大的训练集十分困难,故本发明提出一种采集各波长通道的一个波长范围内的平移误差对应图像,来人工构建大平移误差范围对应的训练集的方法。
[0064]
1:初始像采集:
[0065]
1.1:设定平移误差间隔δ;多个波长通道的选定与平移误差的间隔δ相关:当有n个波长通道时,每个波长通道与平移误差的间隔δ之间需满足λ
i
=m
i
δ,其中1<i≤n,m
i
为整数;
[0066]
步骤1.2:在任意波长通道λ
i
内,通过以平移误差间隔δ调节平移误差进行成像,在λ
i
通道内,采集n
i
=λ
i
/δ 1张图像;调节范围为:当n
i
为奇数时[
‑
λ
i
/2,λ
i
/2],当n
i
为偶数时[
‑
(λ
i
δ)/2,(λ
i
‑
δ)/2];
[0067]
具体成像过程为:参考图1,成像系统包括:单色仪1、扩束镜2、分光棱镜a3,分光棱镜b4、d型反射镜a5、d型反射镜b6,干涉区域选择光阑7,六足平移台8,压电陶瓷促动器9、成像透镜10以及cmos图像传感器11;
[0068]
d型反射镜a5、d型反射镜b6、干涉区域选择光阑7、压电陶瓷促动器9及六足平移台8组合成为拼接镜单元;
[0069]
单色仪1、扩束镜2、分光棱镜a3、分光棱镜b4、成像透镜10、cmos图像传感器11则组合成为成像测量单元;
[0070]
拼接镜单元中,d型反射镜a5被固定,d型反射镜b6通过支撑结构固定在压电陶瓷促动器9及六足平移台8上,d型反射镜a5、d型反射镜b6之间之间存在前后位置光程差(即平移误差),干涉区域选择光阑7紧挨两个反射镜;
[0071]
所述成像测量单元中,单色仪1发出的光通过扩束镜2后变为平行光入射,被分光棱镜a3及分光棱镜b4转入拼接镜单元,在拼接镜单元中根据d型反射镜a5、d型反射镜b6之间的前后位置光程差获得相位差之后再进入cmos图像传感器11上。
[0072]
1.3:建立训练集;
[0073]
1.3.1:按照dfa
‑
lsr的叠加原理将每个波长通道图像进行累加,从而获得每个通道的一个波长内的平移误差对应的lsr值序列,作为原始数据集;
[0074]
该步骤中具体累加的过程为:
[0075]
将这n
i
张图像的每张图像按列进行累加得到n
i
个累加结果,即n
i
个列向量,最后按照式(1)对每个列向量进行处理得到n
i
个lsr值,记为:
[0076][0077]
其中l
p
‑
aver
是以左峰值为中心的三个节点的平均值,r
p
‑
aver
、m
p
‑
aver
同理是以右峰值、中间峰值为中心的三个节点的平均值。这个叠加并计算lsr值的过程源于dfa
‑
lsr方法。不过此处是对单色光成像结果的叠加,而非叠加色散条纹图像,且使用各峰值与相邻值的平均值来计算lsr值以提高对噪声的抵抗性;
[0078]
1.3.2:根据原始数据集,分别建立对应于正、负平移误差范围的训练集,该训练集的具体建立过程为:
[0079]
a:建立正平移误差范围的训练集;
[0080]
a1:当任意通道λ
i
中lsr值序列的序列长度为奇数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的前半序列整体移动至后半序列之后组成新的lsr值序列;
[0081]
a2:当任意通道λ
i
中lsr值序列的序列长度为偶数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之前的序列值作为前半序列整体移动至后半序列之后组成新的lsr值序列;
[0082]
a3:将步骤a1或步骤a2获得的新的lsr值序列正向循环排列;
[0083]
a4:对所有通道执行步骤a1
‑
a3,从而获得正平移误差范围的训练集;
[0084]
b:建立负平移误差范围的训练集;
[0085]
b1:当任意通道中lsr值序列的序列长度为奇数时,去掉lsr值序列中最后一个lsr值,然后将剩余lsr值序列的后半序列整体移动至前半序列之前组成新的lsr值序列;
[0086]
b2:当任意通道中lsr值序列的序列长度为偶数时,去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之后的序列值作为后半序列整体移动至前半序列之前组成新的lsr值序列;
[0087]
b3:将步骤b1或步骤b2获得的新的lsr值序列逆向循环排列;
[0088]
b4:对所有通道执行步骤b1
‑
b3,从而获得负平移误差范围的训练集。
[0089]
1.3.3:将正平移误差范围的训练集和负平移误差范围的训练集首尾相接,并在两个训练集之间加入平移误差为零时对应的lsr值,从而构成训练集;
[0090]
为了便于理解,现根据实例对上述步骤1.3.2及1.3.3进行说明:
[0091]
a:建立正平移误差范围的训练集;
[0092]
a1:对于lsr值序列的序列长度为奇数的通道,如660nm通道,设定步骤1.1中平移误差的间隔δ为30nm。则采集、处理获得的lsr值序列长度为n
i
=660/30 1=23,如:
[0093][0094]
去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的前半序列(上面表中的a部分)整体移动至后半序列之后组成新的lsr值序列:
[0095]
0.0585
……
0.63440.6881
‑
0.6344
……‑
0.05850
[0096]
a2:对于lsr值序列的序列长度为偶数的通道,如690nm通道,设定步骤1.1中平移误差的间隔δ为30nm。则采集、处理获得的lsr值序列长度为n
i
=690/30 1=24,如:
[0097][0098]
去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之前的序列值作为前半序列(上面表中的b部分)整体移动至后半序列之后组成新的lsr值序列:
[0099]
0.0457
……
0.58280.6643
‑
0.6643
‑
0.5828
……‑
0.04570
[0100]
a3:将步骤a1或步骤a2获得的新的lsr值序列正向循环排列;
[0101]
将步骤a2获得的新的lsr值序列正向循环排列:
[0102]
0.0457
……
00.0457
……
00.0457
……0……
[0103]
a4:对所有通道执行步骤a1
‑
a3,从而获得正平移误差范围的训练集;
[0104]
当步骤1.1中通道数n取值为5时:
[0105]
660nm通道0.0585
……
00.0585
……
00.0585
…………
690nm通道0.0457
……‑
0.045700.0457
……‑
0.04570
……
720nm通道0.0672
……‑
0.0962
‑
0.067200.0672
……‑
0.0962
……
750nm通道0.0509
……‑
0.1534
‑
0.1086
‑
0.050900.0509
…………
780nm通道0.0419
……‑
0.1939
‑
0.1516
‑
0.1095
‑
0.041900.0419
……
[0106]
b:建立负平移误差范围的训练集;
[0107]
b1:对于lsr值序列的序列长度为奇数的通道,如660nm通道,设定步骤1.1中平移误差的间隔δ为30nm。则采集、处理获得的lsr值序列长度为n
i
=660/30 1=23,如:
[0108][0109]
去掉lsr值序列中最后一个lsr值,然后将剩余lsr值序列的后半序列(上面表中c部分)整体移动至前半序列之前组成新的lsr值序列;
[0110]
00.0585
……
0.6344
‑
0.6881
‑
0.6344
……‑
0.0585
[0111]
b2:对于lsr值序列的序列长度为偶数的通道,如690nm通道,设定步骤1.1中平移误差的间隔δ为30nm。则采集、处理获得的lsr值序
[0112]
列长度为n
i
=690/30 1=24,如:
[0113][0114]
去掉lsr值序列中第一个lsr值,然后将剩余lsr值序列的中位数及中位数之后的序列值(上面表中的d部分)作为后半序列整体移动至前半序列之前组成新的lsr值序列:
[0115]
00.0457
……
0.58280.6643
‑
0.6643
‑
0.5828
……‑
0.0457
[0116]
b3:将步骤b1或步骤b2获得的新的lsr值序列逆向循环排列;
[0117]
将步骤b1获得的新的lsr值序列逆向循环排列:
[0118]
……0……‑
0.04570
……‑
0.04570
……‑
0.0457
[0119]
b4:对所有通道执行步骤b1
‑
b3,从而获得负平移误差范围的训练集。
[0120]
…………‑
0.05850
……‑
0.05850
……‑
0.0585660nm通道
……
00.0457
……‑
0.045700.0457
……‑
0.0457690nm通道
……
0.0962
……‑
0.067200.06720.0962
……‑
0.0672720nm通道
……
0.1534
‑
0.050900.05090.10860.1534
……‑
0.0509750nm通道
……‑
0.041900.04190.10950.15160.1939
……‑
0.0419780nm通道
[0121]
1.3.3:将正平移误差范围的训练集和负平移误差范围的训练集首尾相接,并在两个训练集之间加入平移误差为零时对应的lsr值,从而构成训练集;
[0122]
…………‑
0.05850
……‑
0.058500.0585
……
00.0585
………………‑
0.045700.0457
……‑
0.045700.0457
……‑
0.045700.0457
…………
00.06720.0962
……‑
0.067200.0672
……‑
0.0962
‑
0.06720
…………
0.05090.10860.1534
……‑
0.050900.0509
……‑
0.1534
‑
0.1086
‑
0.0509
…………
0.10950.15160.1939
……‑
0.041900.0419
……‑
0.1939
‑
0.1516
‑
0.1095
……
[0123]
2、创建神经网络模型
[0124]
神经网络模型包括两个,分别为net1和net2;
[0125]
其中net1网络结构包括一个输入层、一个隐含层和一个输出层,其隐含层仅有三个节点。net1用于拟合单个通道的一个波长内的平移误差值与相应lsr值的关系,其作用相当于精共相。在训练过程中,其输入为单个通道一个波长内的lsr值,形式为lsr
λi
,输出为lsr值对应的平移误差值。
[0126]
net2网络结构采用resnet18网络的一部分,共有11层,此处更改了输入格式及一些节点参数,输入为形如n
×1×
1的lsr特征向量,输出为lsr特征向量对应的平移误差区间;输出层的相邻节点间的间隔为net1选定的波长通道的一个波长距离,即λ
i
。net2的作用相当于粗共相过程,将未知的平移误差划定到一个小范围内,再利用net1的结果进行精确探测。在训练过程中,net2的输入为我们建立的m个形式为n
×
1的特征向量组成的集合,标签为此训练集对应的平移误差值。
[0127]
3、训练神经网络
[0128]
3.1:net1的训练过程
[0129]
将任意单个通道一个波长内平移误差对应的lsr值输入至net1中得到一个波长内平移误差与lsr值的对应关系;
[0130]
3.2:net2的训练过程
[0131]
将步骤1获得的训练集输入至net2中,得到lsr特征向量与平移误差区间的对应关系;
[0132]
4、平移误差探测
[0133]
4.1:在成像系统中设定平移误差值后,进行多通道成像,得到n个通道图像;通过dfa
‑
lsr方法获得每个通道图像的lsr值,组成n
×
1的多通道lsr特征向量,记为
[0134]
4.2:将net1训练时采用通道的lsr值输入net1,得到结果o1;同时向net2输入步骤4.1中获得的特征向量得到结果o2;最终获得平移误差为:
[0135]
piston_detected=o2*λ
i
o1。
[0136]
至此,完成平移误差探测。
[0137]
本发明提供的平移误差探测方法的指标说明:
[0138]
a:探测范围:本发明提出的平移误差探测方法的探测范围边界条件(最大探测范围)取决于入射光的单色性,计算公式如式(3):
[0139][0140]
其中,λ
min
为所用最小波长通道的中心波长,δ
1/2
λ,δλ分别为最小波长通道的半峰全宽和该通道的总带宽。
[0141]
b:探测精度:本发明的探测精度主要取决于net1的拟合精度,探测残余误差基本稳定在net1的拟合误差以下。
[0142]
下面结合具体仿真实例,对本发明的方法作进一步说明:
[0143]
一、成像系统的参数选取
[0144]
(ⅰ)、工作波长应在单色仪的带宽范围内尽量选择长波长,以获得较大的相干长度;此实例取n=5,δ=30nm,中心波长通道为720nm,则5个工作波长通道分别为:660nm,690nm,720nm,750nm,780nm;
[0145]
(ⅱ)、每个波长通道半峰全宽δ
1/2
λ及带宽δλ(每个波长通道的总带宽),这两个参量取值越小,说明各波长通道单色光单色性越高,则相应探测范围越大,本实例分别取值:2.5nm和4nm,该值的选取考虑了实际单色仪的单色性;
[0146]
(ⅲ)、图像传感器像元大小1.67μm;在单独使用cnn
‑
multi
‑
lsr方法过程中,图像传感器像元大小可以不是唯一值,也可使用4.6μm像元大小的图像传感器,但像元大小不宜过大,从而保证成像区域分辨率至少为15
×
15,为提取叠加信号峰值留出余地;
[0147]
(ⅳ)、干涉区域选择光阑:矩孔长2mm,宽2mm;两个矩孔中心距5mm;
[0148]
(
ⅴ
)、成像透镜焦距10cm;(ⅳ),(
ⅴ
)中的参量共同决定双孔衍射图像在(ⅲ)中提及的成像区域内且三个衍射峰值明显,此处的取值同时考虑了与dfs结合使用时的条纹对
比度限制。
[0149]
二、单个波长通道的成像过程
[0150]
参见图1,单色仪发出的光通过扩束镜后变为平行光入射,被分光棱镜a及分光棱镜b转入拼接镜单元,在拼接镜单元中获得相位差之后再进入成像测量单元,由成像测量单元成像在cmos图像传感器上。图2给出了660nm波长通道在50μm的平移误差下的成像结果。
[0151]
三、图像叠加处理过程
[0152]
对于一个特定的平移误差,将所获5张图像的每张图像按列进行累加得到5个累加结果,即5个列向量。最后按照式(1)对每个列向量进行处理得到5个lsr值,这五个lsr值即可组成特征向量[lsr
660
,lsr
690
...lsr
780
],如图3所示的叠加过程之后,再利用式(1),即可获得平移误差为50μm时5个通道的lsr值组成的特征向量[
‑
0.3095,0.6354,0.5866,
‑
0.4367,0.1390]。
[0153]
四、训练集建立过程:
[0154]
按照上述(1.3)的方式建立训练集。本实例中建立了对应于平移误差范围为(
‑
180.9μm,108.9μm)的训练集,共有7260组数据。
[0155]
五、神经网络训练过程:
[0156]
两个神经网络的框架图如图4所示。对两个网络进行训练,此处net1选定的波长通道为720nm通道,则对应net2的输出节点的相邻节点之间相隔720nm。net1的训练集和验证集共有720/30=24组数据。net2训练集共有7260组数据,验证集有4357组数据。由于net1的训练类似于线性函数的拟合过程,故训练过程时间短(5s内),训练结果精度高,在epoch38时就达到了最优性能。net2经过400epochs之后验证精度达到了96.44%,整个训练过程约69mins。
[0157]
六、平移误差探测:使用训练完成的net1与net2对lsr特征向量进行分辨。当给net1和net2分别输入lsr
720
(720nm通道的lsr值)和lsr特征向量时,将net1和net2的输出结果分别记为o1和o2,则对应的平移误差探测结果由式(2)给出。以50μm的平移误差探测过程为例,o2=69,o1=0.3095,且此时net1采用的720nm的数据,故λ
i
=0.72μm,则探测到的平移误差根据式(2)可得:
[0158]
piston
detected
=69
×
0.72 0.3095=49.9895μm
[0159]
探测误差为10.5nm。说明该方法可以实现大范围、高精度探测,还能对噪声有很强的抵抗性。
[0160]
拓展应用
[0161]
本发明提出的平移误差探测方法具有装置适用性,既可以采用图1所示的成像系统,也可将其与色散条纹传感器(dispersed fringe sensor,dfs)联合使用,图5给出了dfs的装置结构图。其中,图5中棱栅的色散系数为:
[0162]
棱栅的色散系数为5.5
×
105;
[0163]
本方法联合色散条纹传感器使用的过程与采用图1的成像系统使用过程类似,区别在于使用宽带光源入射,且在成像测量系统中加入棱栅进行色散已得到色散条纹图像,故两种情况下叠加的图像不同。在联合使用时,需要在色散条纹图像上选择不同的区域进行叠加、计算形成lsr特征向量,代替采用图1的成像系统使用时对每个通道成像结果叠加。具体的各通道选择区域与叠加流程在图6中给出。
[0164]
通过图6的流程可以获得在色散条纹图案上的lsr特征向量,再结合(1.3)数据集建立方法获得训练集与验证集。之后继续采用与net1、net2结构相同的网络,不同的是,由于棱栅的色散作用,选择的各个通道的图像区域的等效带宽为2.42nm左右,利用式(2)可知最大检测范围为(
‑
180μm,180μm),所以网络2的输出节点为500个,节点间隔依然取720nm。
[0165]
图7展示了本发明提出的方法在与dfs联合探测时
‑
165μm平移误差的对应的五个通道区域图像,其中(a)表示无噪时、(b)表示snr=10、(c)表示snr=15,(b)表示snr=20时的各通道区域图像。探测结果为:无噪声时:
‑
165.0024μm;snr=10时:
‑
164.9999μm。因此无论噪声是否存在,与dfs联合的探测结果误差均小于5nm,在大范围、高精度、强抗噪性的基础上,进一步验证了该方法对于装置的适应性。
[0166]
性能说明
[0167]
平移误差探测范围:使用可探测平移误差p
detected
表示,采用图1的成像系统结合本发明的方法时:
‑
100um≤p
detected
≤100um;
[0168]
采用色散条纹传感器(dfs)结合本发明的方法使用时:
‑
169um≤p
detected
≤169um;
[0169]
平移误差平均探测精度:使用平移误差的探测误差p
error
表示,采用图1的成像系统结合本发明的方法且无噪声时p
error
<20nm,采用图1的成像系统结合本发明的方法且snr=15时:p
error
<20nm;
[0170]
采用色散条纹传感器(dfs)结合本发明的方法使用且无噪声:p
error
<40nm,采用色散条纹传感器(dfs)结合本发明的方法使用且snr=15时:p
error
<50nm;
[0171]
采用图1的成像系统结合本发明的方法使用时,对于100um的平移误差进行探测。无噪声时,探测结果为:99.9974um,误差小于5nm;snr=15时,探测结果为:99.9985um,误差小于20nm。
[0172]
采用色散条纹传感器(dfs)结合本发明的方法使用时,对于169um的平移误差进行探测。无噪声时,探测结果为:169.0269um,误差小于40nm;snr=15时,探测结果为:169.0228um,误差小于50nm。
[0173]
与现有探测技术指标对比:
[0174]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

