1.本技术涉及清洁机器人技术领域,尤其涉及一种基站及清洁机器人系统。
背景技术:
2.现有的一些清洁机器人包括拖布等拖擦件,在清洁机器人沿着地面行走的过程中,利用拖擦件对粘附在地面上的脏污物品进行清洁,实现拖地功能。
3.然而,清洁机器人在进行大面积区域的清洁时,需要用户更换拖擦件以保证清洁效果,增加了用户的工作量。
技术实现要素:
4.本技术提供一种基站及清洁机器人系统,能够减小用户的工作量。
5.第一方面,本技术提供一种基站,包括:用于承载清洁机器人的基座,所述基座上设置有容纳槽,所述清洁机器人承载于所述基座上时,所述清洁机器人的拖擦件容置于所述容纳槽中;清洁组件,所述清洁组件包括凸起结构,所述凸起结构位于所述容纳槽中,所述拖擦件容置于所述容纳槽中时,所述凸起结构与所述拖擦件触接;尘液回收组件,所述尘液回收组件包括吸取组件、吸污管以及吸垃管,所述吸取组件与所述吸污管以及所述吸垃管连接,所述吸污管与所述容纳槽连通,所述吸垃管包括用于与所述清洁机器人的集尘盒连接的进尘口,所述吸垃管用于吸取所述集尘盒中的垃圾。
6.在本技术的一些实施例中,所述吸取组件包括储污箱以及用于将所述储污箱中的空气排出的风机,所述吸污管以及所述吸垃管与所述储污箱连通。
7.基于上述实施例,储污箱用于存储吸污管吸取的污液以及吸垃管吸取的垃圾,完成对清洁机器人的清洁后,可以启动风机,利用风机将储污箱内的空气抽出,以使储污箱内的气压比吸污管以及吸垃管内的气压低,形成负压吸取状态,从而可以将容纳槽中的污液以及集尘盒中的垃圾吸取至储污箱中,并且可以同时吸取容纳槽中的污液以及集尘盒中的垃圾,从而可以提升工作效率。
8.在本技术的一些实施例中,所述储污箱内设置有储污腔,所述储污腔中设置有滤网,所述滤网将所述储污腔分隔为储尘腔以及储液腔,所述储尘腔位于所述储液腔的上方,所述风机与所述储液腔连接。
9.基于上述实施例,储尘腔与储液腔通过滤网上的滤孔连通,风机启动时,利用风机将储污箱内的空气抽出,以通过吸污管和吸垃管同时吸取容纳槽中的污液以及集尘盒中的垃圾,此时污液吸取至储液腔中,而垃圾由于滤网的隔绝存储于储尘腔中,从而可以避免风机将储污箱内的垃圾直接排放至外界环境中。
10.在本技术的一些实施例中,所述吸污管以及所述吸垃管均与所述储尘腔连接。
11.基于上述实施例,同时吸取容纳槽中的污液以及集尘盒中的垃圾时,污液和垃圾均吸取至储尘腔中,随后污液通过滤网滴落至储液腔内,而垃圾被拦截在滤网上。
12.在本技术的一些实施例中,所述吸污管与所述储污腔连接,所述吸垃管与所述储
尘腔连接。
13.基于上述实施例,同时吸取容纳槽中的污液以及集尘盒中的垃圾时,污液通过吸污管吸取至储污腔内,而垃圾通过吸垃管吸取至储尘腔内,垃圾与污液互不干扰,可以防止滤网被垃圾与污液混合形成的污泥堵塞。
14.在本技术的一些实施例中,所述吸污管以及所述吸垃管上均设置有阀门。
15.基于上述实施例,利用阀门可以控制吸污管以及所述吸垃管的通断,使得吸取容纳槽中的污液与吸取集尘盒中的垃圾可以分时进行,可以避免吸污功能和吸尘功能相互干扰。
16.在本技术的一些实施例中,所述进尘口位于所述容纳槽的上方;或,所述清洁机器人承载于所述基座上时,所述进尘口位于所述集尘盒的下方。
17.基于上述实施例,所述进尘口位于所述容纳槽的上方时,可以防止清洗液溅射至进尘口处导致垃圾与清洗液混合堵塞进尘口;所述进尘口位于所述集尘盒的下方时,吸垃管吸取集尘盒中的灰尘时,进尘口与集尘盒的底部连接,以便于集尘盒中灰尘的排出。
18.在本技术的一些实施例中,所述基站还包括用于向所述拖擦件喷射清洗液的喷头,所述喷头位于所述容纳槽中。
19.基于上述实施例,可以利用喷头在清洗拖擦件的过程中不断为拖擦件提供干净的清洗液,以提高清洗效率和清洗效果。
20.在本技术的一些实施例中,所述吸污管包括位于所述容纳槽的侧壁上的吸污口,所述容纳槽的底部设置有导流斜面,所述导流斜面的底端靠近所述吸污口,所述喷头靠近所述导流斜面的顶端设置。
21.基于上述实施例,对拖擦件进行清洗时,由于容纳槽的底部具有导流斜面,污液会向导流斜面的底端聚集,并且喷头靠近导流斜面的顶端设置,从而可以避免喷头被污液淹没导致喷头堵塞,在不增加容纳槽的尺寸的前提下,通过对吸污口、容纳槽的底部以及喷头位置的设计,可以增加容纳槽容纳污液的能力,从而提升拖擦件的可清洗时间,清洗拖擦件产生的污液可以暂存于容纳槽中直至拖擦件清洗完成,随后通过吸垃管吸取集尘盒中的垃圾时,可以通过吸污口同时吸取容纳槽内的污液,从而使得风机启动时可以同时吸取容纳槽中的污液以及集尘盒中的垃圾,可以降低基站的功耗,提升工作效率。
22.第二方面,本技术还提供一种清洁机器人系统,包括清洁机器人以及如上述任一实施例中所述的基站,所述清洁机器人包括机体以及设置于所述机体上的拖擦件和集尘盒,所述拖擦件位于所述机体的底侧,所述集尘盒上设置有供所述吸垃管吸取垃圾的排灰口。
23.本技术的有益效果为:需要对清洁机器人的拖擦件进行清洗时,清洁机器人移动至基座上,并将拖擦件容置于容纳槽中,并与凸起结构触接,此时拖擦件开始转动,利用清洗液对拖擦件进行清洗,可以采用在容纳槽中预先储存清洗液或在清洗拖擦件的过程中提供清洗液的方式,为拖擦件提供清洗液,清洗液可以为清水或混杂有清洗剂的液体。清洗完成后,通过吸污管吸取容纳槽中的污液,并通过吸垃管将集尘盒中的垃圾吸出,基座同时具备吸污和吸尘功能,无需用户更换拖擦件以及处理集尘盒中的垃圾,可以减少用户的工作量。
附图说明
24.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
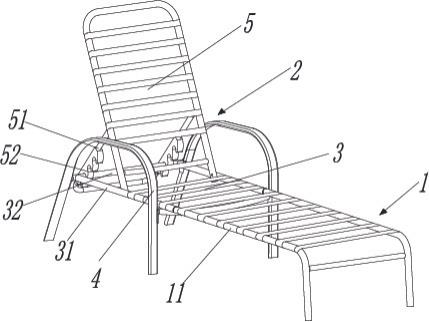
25.图1为本技术一实施方式中基站正侧的整体结构示意图;
26.图2为本技术一实施方式中基站背侧的部分结构示意图;
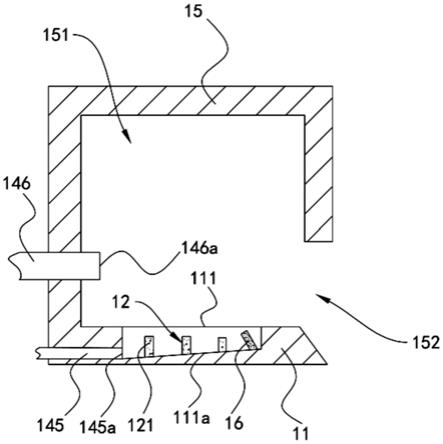
27.图3为本技术一实施方式中基站的部分剖面示意图;
28.图4为本技术另一实施方式中基站的部分剖面示意图;
29.图5为本技术一实施方式中储污箱的结构示意图;
30.图6为本技术另一实施方式中储污箱的结构示意图;
31.图7为本技术一实施方式中清洁机器人系统的结构示意图。
32.附图标记:
33.10、基站;11、基座;111、容纳槽;111a、导流斜面;12、清洁组件;121、凸起结构;13、尘液回收组件;14、吸取组件;141、储污箱;142、储污腔;142a、储尘腔;142b、储液腔;143、滤网;144、风机;145、吸污管;145a、吸污口;145b、出液口;146、吸垃管;146a、进尘口;146b、出尘口;15、机架;151、清洁腔;152、出入口;16、喷头;17、储液箱;20、清洁机器人;21、机体;22、拖擦件;23、集尘盒;231、排灰口;232、挡板。
具体实施方式
34.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
35.本技术提供一种基站及清洁机器人系统,用以解决清洁机器人在进行大面积区域的清洁时,需要用户更换拖擦件以保证清洁效果,增加了用户的工作量的问题。
36.第一方面,本技术提供一种基站10,如图1至图4所示,基站10包括基座11、清洁组件12以及尘液回收组件13。
37.具体的,所述基座11用于承载清洁机器人20(如图6),所述基座11上设置有容纳槽111,所述清洁机器人20承载于所述基座11上时,所述清洁机器人20的拖擦件22容置于所述容纳槽111中。可以理解的是,基座11的整体形状可以为圆盘状、方盘状或其他形状,本技术对基座11的形状不做限制。清洁机器人20移动至基座11上时,位于清洁机器人20底侧的拖擦件22可以容置于容纳槽111,从而可以在容纳槽111内对拖擦件22进行清洗,防止水液飞溅,容纳槽111的尺寸可以根据清洁机器人20以及拖擦件22的尺寸进行选择,一般而言,容纳槽111的尺寸大于拖擦件22的尺寸,并小于清洁机器人20的尺寸,以防止清洁机器人20掉落至容纳槽111中。
38.所述清洁组件12包括凸起结构121,所述凸起结构121位于所述容纳槽111中,所述拖擦件22容置于所述容纳槽111中时,所述凸起结构121与所述拖擦件22触接。凸起结构121可以包括多个相间隔的凸块,对拖擦件22进行清洗时,利用凸块与拖擦件22触接,随后拖擦件22进行转动,在转动过程中完成拖擦件22的清洗,凸块的尺寸、数量以及形状可以根据实
际情况进行选择。
39.所述尘液回收组件13包括吸取组件14、吸污管145以及吸垃管146,所述吸取组件14与所述吸污管145以及所述吸垃管146连接,所述吸污管145与所述容纳槽111连通,所述吸垃管146包括用于与所述清洁机器人20的集尘盒23连接的进尘口146a,所述吸垃管146用于吸取所述集尘盒23中的垃圾。其中,吸取组件14可以为吸污管145以及吸垃管146提供吸力,从而可以将容纳槽111中的污液以及集尘盒23中的垃圾吸出,集尘盒23中的垃圾可以仅为灰尘,也可以为灰尘与液体的混合物。
40.可以理解的是,需要对清洁机器人20的拖擦件22进行清洗时,清洁机器人20移动至基座11上,并将拖擦件22容置于容纳槽111中,并与凸起结构121触接,此时拖擦件22开始转动,利用清洗液对拖擦件22进行清洗,可以采用在容纳槽111中预先储存清洗液或在清洗拖擦件22的过程中提供清洗液的方式,为拖擦件22提供清洗液,清洗液可以为清水或混杂有清洗剂的液体。清洗完成后,通过吸污管145吸取容纳槽111中的污液,并通过吸垃管146将集尘盒23中的垃圾吸出,基座11同时具备吸污和吸尘功能,无需用户更换拖擦件22以及处理集尘盒23中的垃圾,可以减少用户的工作量。
41.继续参见图1至图4,在本技术一实施例中,所述基站10还包括机架15,所述机架15设置于所述基座11的上方,且所述机架15与所述基座11围合形成用于容置清洁机器人20的清洁腔151,清洁腔151与容纳槽111连通,所述机架15的一侧开设有供所述清洁机器人20出入所述清洁腔151的出入口152,使得拖擦件22的清洗以及集尘盒23中垃圾的回收均在清洁腔151内进行,以防止清洗液溅射至地面以及垃圾中的灰尘散布至外界环境中。
42.在本技术一实施例中,所述进尘口146a位于所述容纳槽111的上方,以防止清洗液溅射至进尘口146a处导致垃圾与清洗液混合堵塞进尘口146a。可以理解的是,此时当所述清洁机器人承载于所述基座11上时,所述进尘口146a位于所述集尘盒23的上方或侧方。
43.进一步的,所述进尘口146a可以位于所述机架15远离所述出入口152的一侧上,以防止垃圾中的灰尘散布至外界环境中的同时,便于进尘口146a与集尘盒23的连接。
44.当然,如图4所示,所述进尘口146a也可以设置于其他位置,如当所述清洁机器人承载于所述基座11上时,所述进尘口146a位于所述集尘盒23的下方。即吸垃管146吸取集尘盒23中的灰尘时,进尘口146a与集尘盒23的底部连接,以便于集尘盒23中灰尘的排出。
45.继续参见图1至图4,具体的,所述吸取组件14包括储污箱141以及用于将所述储污箱141中的空气排出的风机144,所述吸污管145以及所述吸垃管146与所述储污箱141连通。
46.可以理解的是,储污箱141用于存储吸污管145吸取的污液以及吸垃管146吸取的垃圾,储污箱141可以为密封式箱体,完成对清洁机器人20的清洁后,可以启动风机144,利用风机144将储污箱141内的空气抽出,以使储污箱141内的气压比吸污管145以及吸垃管146内的气压低,形成负压吸取状态,从而可以将容纳槽111中的污液以及集尘盒23中的垃圾吸取至储污箱141中,并且可以同时吸取容纳槽111中的污液以及集尘盒23中的垃圾,从而可以提升工作效率,风机144的具体工作原理在现有技术中早有公示,这里不做赘述。
47.需要说明的是,一般而言,利用风机144吸取集尘盒23中的垃圾时,需要在储污箱141中增加过滤垃圾的器件,以使得风机144仅从储污箱141内抽取空气,而将垃圾滞留于储污箱141内,而在本技术中,利用风机144能够同时吸取容纳槽111中的污液以及集尘盒23中的垃圾,可以通过对吸污管145的出液口145b以及吸垃管146的出尘口146b进行设计,如出
液口145b位于出尘口146b上方,风机144设置于储污箱141的顶部,使得利用风机144同时吸取容纳槽111中的污液以及集尘盒23中的垃圾时,污液与垃圾混杂在一起并落入储污箱141的底部,从而可以无需在储污箱141中增加过滤垃圾的器件。
48.当然,为了增加吸取组件14的安全性和可靠性,也可以在储污箱141中设置起过滤垃圾的器件。如图3至图6所示,具体的,所述储污箱141内设置有储污腔142,所述储污腔142中设置有滤网143,所述滤网143将所述储污腔142分隔为储尘腔142a以及储液腔142b,所述储尘腔142a位于所述储液腔142b的上方,所述风机144与所述储液腔142b连接,即风机144的进风口设置于储液腔142b的侧壁上。
49.需要说明的是,储尘腔142a与储液腔142b通过滤网143上的滤孔连通,风机144启动时,利用风机144将储污箱141内的空气抽出,以通过吸污管145和吸垃管146同时吸取容纳槽111中的污液以及集尘盒23中的垃圾,此时污液吸取至储液腔142b中,而垃圾由于滤网143的隔绝存储于储尘腔142a中,从而可以避免风机144将储污箱141内的垃圾直接排放至外界环境中,并且一般而言,储污箱141上会设置有与储液腔142b连通的排污口,可以通过排污口将储液腔142b内的污液排出,本技术中利用过滤网143将垃圾和污液分隔,可以防止垃圾和污液混合形成的污泥堵塞排污口。其中,滤网143的材质跟滤孔的大小可以根据实际情况进行选择,滤网143可以实现垃圾与污液分离,同时保证储尘腔142a与储液腔142b连通即可,并申请不做具体限制。
50.在一实施例中,如图5所示,可以将所述吸污管145以及所述吸垃管146均与所述储尘腔142a连接,此时可以将吸污管145的出液口145b以及吸垃管146的出尘口146b均设置于储尘腔142a的侧壁上;此时也可以设置一连接管,吸污管145以及吸垃管146通过连接管与储尘腔142a连接,同时吸取容纳槽111中的污液以及集尘盒23中的垃圾时,污液和垃圾均吸取至储尘腔142a中,随后污液通过滤网143滴落至储液腔142b内,而垃圾被拦截在滤网143上。
51.在另一实施例中,如图6所示,还可以将所述吸污管145与所述储污腔142连接,所述吸垃管146与所述储尘腔142a连接,即吸污管145的出液口145b可以设置于所述储污腔142的侧壁上,吸垃管146的出尘口146b可以设置于储尘腔142a的侧壁上,同时吸取容纳槽111中的污液以及集尘盒23中的垃圾时,污液通过吸污管145吸取至储污腔142内,而垃圾通过吸垃管146吸取至储尘腔142a内,垃圾与污液互不干扰,可以防止滤网143被垃圾与污液混合形成的污泥堵塞。
52.需要说明的是,还可以在所述吸污管145以及所述吸垃管146上均设置阀门(图中未示出),利用阀门控制吸污管145以及所述吸垃管146的通断,使得吸取容纳槽111中的污液与吸取集尘盒23中的垃圾可以分时进行,避免吸污功能和吸尘功能相互干扰。阀门可以为电磁阀。
53.继续参见图3至图6,在本技术一实施方式中,所述基站10还包括用于向所述拖擦件22喷射清洗液的喷头16,所述喷头16位于所述容纳槽111中。需要说明的是,可以利用喷头16在清洗拖擦件22的过程中不断为拖擦件22提供干净的清洗液,以提高清洗效率和清洗效果。其中,为喷头16提供清洗液的液源可以为外界液源,即与基站10独立的液源,以减小基站10的整体体积和重量;液源也可以为基站10内部的夜源,如可以在基站10上设置存储清洗液的储液箱17(如图2)。喷头16与液源之间可以通过水管连接,水管上可以设置开关器
件或/和水泵等器件,以控制水源与喷头16之间的通断。
54.参见图3和图4,在本技术一实施例中,所述吸污管145包括位于所述容纳槽111的侧壁上的吸污口145a,所述容纳槽111的底部设置有导流斜面111a,所述导流斜面111a的底端靠近所述吸污口145a,所述喷头16靠近所述导流斜面111a的顶端设置。
55.需要说明的是,对于本领域技术人员可知,清洁机器人20上的拖擦件22与集尘盒23位于不同位置,并且一般而言,以集尘盒23的位置为清洁机器人20的前端为例,拖擦件22一般靠近清洁机器人20的后端设置,即拖擦件22一般远离集尘盒23设置,因此,对清洁器件人进行处理时,需要分时进行对拖擦件22的清洗以及集尘盒23中垃圾的回收,以先对拖擦件22进行清洗为例,拖擦件22清洗完成后,清洁机器人20需要从基座11移动至地面,并在地面上完成掉头后,机器人重新移动至基座11上,此时可以通过吸垃管146吸取集尘盒23中的垃圾。
56.当然,拖擦件22也可以靠近集尘盒23设置,清洁机器人20移动至基座11上后,对拖擦件22进行清洗,利用吸污管145吸取容纳槽111中的污液时,可以同时利用吸垃管146吸取集尘盒23中的垃圾。
57.在本技术中,对拖擦件22进行清洗时,由于容纳槽111的底部具有导流斜面111a,污液会向导流斜面111a的底端聚集,并且喷头16靠近导流斜面111a的顶端设置,从而可以避免喷头16被污液淹没导致喷头16堵塞,在不增加容纳槽111的尺寸的前提下,通过对吸污口145a、容纳槽111的底部以及喷头16位置的设计,可以增加容纳槽111容纳污液的能力,从而提升拖擦件22的可清洗时间,清洗拖擦件22产生的污液可以暂存于容纳槽111中直至拖擦件22清洗完成,随后通过吸垃管146吸取集尘盒23中的垃圾时,可以通过吸污口145a同时吸取容纳槽111内的污液,从而使得风机144启动时可以同时吸取容纳槽111中的污液以及集尘盒23中的垃圾,可以降低基站10的功耗,提升工作效率。
58.第二方面,基于上述基站10,本技术还提供一种清洁机器人系统,如图7所示,所述清洁机器人20系统包括清洁机器人20以及如上述的基站10。
59.其中,所述清洁机器人20包括机体21以及设置于所述机体21上的拖擦件22和集尘盒23,所述拖擦件22位于所述机体21的底侧,所述集尘盒23上设置有供所述吸垃管146吸取垃圾的排灰口231。
60.需要说明的是,通过吸垃管146吸取集尘盒23中的垃圾时,吸垃管146的的进尘口146a通过排灰口231伸入集尘盒23内,从而可以吸取集尘盒23中的垃圾。
61.在本技术一实施例中,可以在所述排灰口231处设置与排灰口231配合的挡板232,挡板232活动连接于机体21以用于控制排灰口231的启闭,通过吸垃管146吸取集尘盒23中的垃圾时,挡板232移动以打开排灰口231,清洁机器人20移动使得吸垃管146的进尘口146a通过排灰口231插入集尘盒23中,垃圾吸取完成后,清洁机器人20移动使得吸垃管146的进尘口146a移出集尘盒23,挡板232移动以闭合排灰口231。
62.可以理解的是,当所述吸垃管146的进尘口146a位于所述容纳槽111的上方时,此时排灰口231可以设置于集尘盒23的侧部或顶部,以便于进尘口146a与排灰口231的连接;当所述进尘口146a位于所述集尘盒23的下方时,此时排灰口231可以设置于集尘盒23底部,以便于进尘口146a与排灰口231的连接。
63.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精
神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。