1.本发明涉及相机领域,尤其涉及一种相机盖板的脏污检测方法及检测装置。
背景技术:
2.飞行时间相机(time offlight,tof)是新一代距离检测及3d成像技术产品。是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。tof相机在工作过程中,其盖板(cover glass,cg)表面会逐渐积累灰尘,会造成测距不准的情况。因此,需要检测表面是否存在灰尘。
3.公开号为cn 112672017 a的发明专利公开了测试结构件、tof装置以及镜头脏污检测方法,所述测试结构件用于设置到tof模组的出光方向上,以检测所述tof模组的透明盖板表面的镜头脏污情况,所述测试结构件包括两个子件,所述子件具有反射面,且所述两个子件的反射面沿同一轴线依次设置,且所述两个子件的反射面至少具有部分不相重叠的区域。该发明的镜头脏污检测方法步骤为:获取提前配置的标准灰度图像;控制tof传感器件朝向所述测试结构件出射检测光信号,并接收所述反射光信号,根据所述反射光信号获取所述测试结构件的实测灰度图像;比较所述标准灰度图像以及所述实测灰度图像,并根据比较结果判断所述透明盖板上是否存在镜头脏污。该发明通过获取标准灰度图像和实测灰度图像,然后比较标准图像和灰度图像来判断透明盖板上是否存在镜头脏污。判断方法简单,判断镜头脏污的准确度和精确度并不高。
4.因此,有必要提供一种相机盖板的脏污检测方法及检测装置以解决上述的现有技术中存在的问题。
技术实现要素:
5.本发明的目的在于提供一种相机盖板的脏污检测方法及检测装置,以解决判断盖板和镜头脏污的准确度和精确度不高的问题。
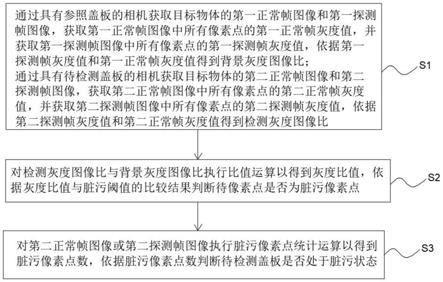
6.为实现上述目的,本发明的所述相机盖板的脏污检测方法,包括步骤:
7.s1:通过具有参照盖板的相机获取所述目标物体的第一正常帧图像和第一探测帧图像,获取所述第一正常帧图像中所有像素点的第一正常帧灰度值,并获取所述第一探测帧图像中所有像素点的第一探测帧灰度值,依据所述第一探测帧灰度值和所述第一正常帧灰度值得到背景灰度图像比;
8.通过具有待检测盖板的相机获取所述目标物体的第二正常帧图像和第二探测帧图像,获取所述第二正常帧图像中所有像素点的第二正常帧灰度值,并获取所述第二探测帧图像中所有像素点的第二探测帧灰度值,依据所述第二探测帧灰度值和所述第二正常帧灰度值得到检测灰度图像比;
9.s2:对所述检测灰度图像比与所述背景灰度图像比执行比值运算以得到灰度比值,依据所述灰度比值与脏污阈值的比较结果判断所述像素点是否为脏污像素点;
10.s3:对所述第二正常帧图像或所述第二探测帧图像执行脏污像素点统计运算以得
到脏污像素点数,依据脏污像素点数判断所述待检测盖板是否处于脏污状态。
11.本发明的所述相机盖板的脏污检测方法的有益效果在于:
12.本发明依据第一正常帧图像、第一探测帧图像、第二正常帧图像和第二探测帧图像的四帧图像分别获取第一正常帧灰度值、第一探测帧灰度值、第二正常帧灰度值和第二探测帧灰度值,以四个不同图像以获取四个不同的灰度值,并分别计算灰度比以得到检测灰度图像比和背景灰度图像比,最后依据检测灰度图像比与背景灰度图像比的比值得到灰度比值,依据灰度比值与脏污阈值的比较结果判断待检测盖板像素点是否为脏污像素点,并依据脏污像素点数判断所述待检测盖板是否处于脏污状态。以四个不同的图像作为测量样本,检测四个图像中的所有像素点的灰度值,提供了更多的检测样本,从而大大提高了检测结果和脏污状态判断结果的可靠性。先计算了参照盖板相机的背景灰度图像比作为相机盖板脏污检测的参照,然后计算待检测盖板相机的检测灰度图像比,最后计算灰度比值,并依据脏污像素点数来判断相机盖板是否处于脏污状态,判断步骤严谨且有序,避免了个别异常脏污像素点而造成的相机盖板的脏污状态判断错误,提高了盖板脏污状态检测结果的准确度和精确度。
13.优选地,所述步骤s1中,通过具有参照盖板的相机获取所述目标物体的第一正常帧图像和第一探测帧图像的步骤包括:
14.设置固定周期,每一个所述固定周期均包括第一曝光时间和第二曝光时间,所述第一曝光时间和所述第二曝光时间交替设置;
15.所述具有参照盖板的相机向所述目标物体发射正常帧激光脉冲以形成所述第一正常帧图像,所述正常帧激光脉冲的曝光时间为第一曝光时间;
16.所述具有参照盖板的相机向所述目标物体发射探测帧激光脉冲以形成所述第一探测帧图像,所述探测帧激光脉冲的曝光时间为第二曝光时间;
17.所述正常帧激光脉冲的脉冲宽度大于所述探测帧激光脉冲的脉冲宽度,所述第一曝光时间与所述第二曝光时间相等。其有益效果在于,通过参照盖板相机向目标物体发射正常帧激光脉冲和探测帧激光脉冲以分别获取第一正常帧图像和第一探测帧图像,以提高检测的像素点的样本数。
18.进一步优选地,所述步骤s1中,通过具有待检测盖板的相机获取所述目标物体的第二正常帧图像和第二探测帧图像的步骤包括:
19.所述具有待检测盖板的相机向所述目标物体发射所述正常帧激光脉冲以形成所述第二正常帧图像,所述正常帧激光脉冲的曝光时间为所述第一曝光时间;
20.所述具有待检测盖板的相机向所述目标物体发射所述探测帧激光脉冲以形成所述第二探测帧图像,所述探测帧激光脉冲的曝光时间为所述第二曝光时间。其有益效果在于,通过待检测盖板相机向目标物体发射正常帧激光脉冲和探测帧激光脉冲以分别获取第二正常帧图像和第二探测帧图像,以提高检测的像素点的样本数。正常帧激光脉冲的脉冲宽度大于探测帧激光脉冲的脉冲宽度,使得通过发射正常帧激光脉冲获取的正常帧图像与通过发射探测帧获取的探测帧图像的像素点的灰度值有所区别,从而使得后续的计算更加精准。第一曝光时间与第二曝光时间相等,保证第一正常帧图像和第一探测帧图像,以及第二正常帧和第二探测帧图像不会因曝光时间而影响其检测结果,进一步提高盖板脏污状态判断的准确性和可靠性。
21.优选地,所述步骤s2中,依据所述灰度比值与脏污阈值的比较结果判断所述像素点是否为脏污像素点的步骤包括:
22.当判断所述灰度比值小于所述脏污阈值,判定所述像素点为清洁像素点;
23.当判断所述灰度比值大于或等于所述脏污阈值,判定所述像素点为脏污像素点。
24.进一步优选地,步骤s3中,依据所述脏污像素点数判断所述待检测盖板是否处于脏污状态的步骤包括:
25.设置轻脏阈值、中脏阈值和重脏阈值,所述中脏阈值大于所述轻脏阈值,所述重脏阈值大于所述中脏阈值;
26.依据所述脏污像素点数与所述轻脏阈值、所述中脏阈值和所述重脏阈值的比较结果判断所述待检测盖板的脏污状态。其有益效果在于,设置的轻脏阈值、中脏阈值和重脏阈值为盖板的脏污状态提供了判断标准,提高了判断盖板脏污状态的精确度。
27.进一步优选地,依据所述脏污像素点数与所述轻脏阈值、所述中脏阈值和所述重脏阈值的比较结果判断所述待检测盖板的脏污状态的步骤包括:
28.当判断所述脏污像素点数小于所述轻脏阈值,判定所述待检测盖板处于整洁状态;
29.当判断所述脏污像素点数大于或等于所述轻脏阈值且小于所述中脏阈值,判定所述待检测盖板处于轻度脏污状态;
30.当判断所述脏污像素点数大于或等于所述中脏阈值且小于所述重脏阈值,判定所述待检测盖板处于中度脏污状态;
31.当判断所述脏污像素点数大于或等于所述重脏阈值,判定所述待检测盖板处于重度脏污状态。
32.优选地,所述步骤s1中,依据所述第一正常帧灰度值和所述第一探测帧灰度值得到背景灰度图像比的步骤包括:
33.获取所述第一正常帧图像的任一第一像素点的正常帧灰度值,计算所述第一探测帧图像的第二像素点的探测帧灰度值,所述第一正常帧图像中所述第一像素点的位置与所述第一探测帧图像中所述第二像素点的位置相同;
34.对所述第二像素点的探测帧灰度值与所述第一像素点的正常帧灰度值执行比值运算以得到背景灰度图像比。
35.进一步优选地,所述步骤s1中,依据所述第二正常帧灰度值和所述第二探测帧灰度值得到检测灰度图像比的步骤包括:
36.获取所述第二正常帧图像的第三像素点的正常帧灰度值,计算所述第二探测帧图像的第四像素点的探测帧灰度值,所述第二正常帧图像中所述第三像素点的位置和所述第二探测帧图像中所述第四像素点的位置均与所述第一正常帧图像中所述第一像素点的位置相同;
37.对所述第四像素点的探测帧灰度值与所述第三像素点的正常帧灰度值执行比值运算以得到检测灰度图像比。其有益效果在于,选取第一正常帧图像中的任意一个第一像素点后,确定第一像素点的位置,并在第一探测帧图像、第二正常帧图像和第二探测帧图像中分别选取与第一正常帧图像中相同像素点位置的第二像素点、第三像素点和第四像素点,以保证其计算像素灰度值及灰度比值的准确性。
38.本发明还提供一种检测装置,包括:
39.激光装置,设置于相机盖板的内侧,用于向所述目标物体发射激光脉冲;
40.成像传感器,设置于所述相机盖板的内侧,用于接收所述激光脉冲并形成第一正常帧图像、第一探测帧图像、第二正常帧图像和第二探测帧图像,并依据所述第一正常帧图像获取第一正常帧灰度值,依据所述第一探测帧图像获取第一探测帧灰度值,依据所述第二正常帧图像获取第二正常帧灰度值,以及依据所述第二探测帧图像获取第二探测帧灰度值;
41.处理模块,与所述成像传感器连接,用于对所述第一正常帧灰度值与所述第一探测帧灰度值执行比值运算以得到背景灰度图像比,对所述第二正常帧灰度值与所述第二探测帧灰度值执行比值运算以得到检测灰度图像比,以及对所述检测灰度图像比与所述背景灰度图像比执行比值运算以得到灰度比值;
42.所述处理模块还用于依据所述灰度比值与脏污阈值的比较结果判断所述第二正常帧图像或所述第二探测帧图像的像素点是否为脏污像素点,并依据脏污像素点数判断待检测盖板是否处于脏污状态。
43.本发明的所述检测装置的有益效果在于:
44.本发明通过成像传感器获取第一正常帧图像、第一探测帧图像、第二正常帧图像和第二探测帧图像,通过成像传感器获取第一正常帧灰度值、第一探测帧灰度值、第二正常帧灰度值和第二探测帧灰度值,通过检测四个图像中的所有像素点的灰度值,提供了更多的检测样本,从而大大提高了检测结果和脏污状态判断结果的可靠性。通过处理模块计算背景灰度图像比、检测灰度图像比及灰度比值,计算严谨且有序,提高了盖板脏污状态检测结果的准确度和精确度。
45.优选地,当所述处理模块判断所述灰度比值大于或等于所述脏污阈值,判定所述像素点为脏污像素点;
46.所述处理模块还用于统计所述脏污像素点以得到脏污像素点数,并执行待检测盖板脏污状态的判断步骤:
47.当判断所述脏污像素点数小于轻脏阈值,判断所述待检测盖板处于整洁状态;
48.当判断所述脏污像素点数大于或等于所述轻脏阈值且小于中脏阈值,判定所述待检测盖板处于轻度脏污状态;
49.当判断所述脏污像素点数大于或等于所述中脏阈值且小于重脏阈值,判定所述待检测盖板处于中度脏污状态;
50.当判断所述脏污像素点数大于或等于所述重脏阈值,判定所述待检测盖板处于重度脏污状态。
附图说明
51.图1为本发明实施例的相机盖板的脏污检测方法流程图;
52.图2为本发明实施例的判断像素点的脏污状态的流程图;
53.图3为本发明实施例的判断待检测盖板的脏污状态的流程图;
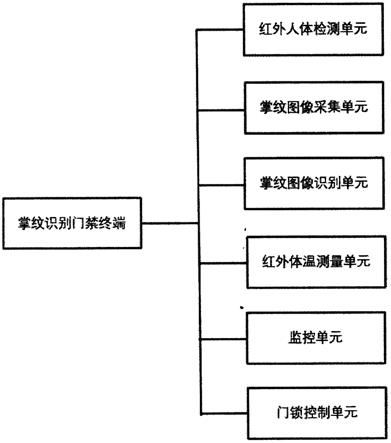
54.图4为本发明实施例的检测装置的结构示意图;
55.图5为本发明实施例的相机盖板与激光装置的位置示意图。
具体实施方式
56.为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
57.针对现有技术存在的问题,本发明的相机盖板的脏污检测方法,图1为本发明实施例的相机盖板的脏污检测方法流程图,参照图1,相机盖板的脏污检测方法包括步骤:
58.s1:通过具有参照盖板的相机获取目标物体的第一正常帧图像和第一探测帧图像,计算第一正常帧图像中所有像素点的第一正常帧灰度值ir_ref1,并计算第一探测帧图像中所有像素点的第一探测帧灰度值ir_ref2,依据第一探测帧灰度值ir_ref2和第一正常帧灰度值ir_ref1得到背景灰度图像比ratio_ref;默认参照盖板为表面无灰尘的盖板,以作为相机盖板脏污检测的参照。
59.具体地,背景灰度图像比为第一探测帧灰度值与第一正常帧灰度值的比值,即ratio_ref=ir_ref2/ir_ref1。
60.通过具有待检测盖板的相机获取目标物体的第二正常帧图像和第二探测帧图像,计算第二正常帧图像中所有像素点的第二正常帧灰度值ir_test1,并计算第二探测帧图像中所有像素点的第二探测帧灰度值ir_test2,依据第二探测帧灰度值ir_test2和第二正常帧灰度值ir_test1得到检测灰度图像比ratio_test;
61.具体地,检测灰度图像比为第二探测帧灰度值与第二正常帧灰度值的比值,即ratio_test=ir_test2/ir_test1。
62.s2:对检测灰度图像比ratio_ref与背景灰度图像比ratio_test执行比值运算以得到灰度比值k,即k=ratio_test/ratio_ref。依据灰度比值k与脏污阈值thres的比较结果判断像素点是否为脏污像素点;
63.s3:对第二正常帧图像或第二探测帧图像执行脏污像素点统计运算以得到脏污像素点数a_all,依据脏污像素点数a_all判断待检测盖板是否处于脏污状态。
64.本发明的相机盖板的脏污检测方法的优点为:
65.(1)本发明依据第一正常帧图像、第一探测帧图像、第二正常帧图像和第二探测帧图像的四帧图像分别获取第一正常帧灰度值、第一探测帧灰度值、第二正常帧灰度值和第二探测帧灰度值,以四个不同图像以获取四个不同的灰度值,并分别计算灰度比以得到检测灰度图像比和背景灰度图像比,最后依据检测灰度图像比与背景灰度图像比的比值得到灰度比值,依据灰度比值与脏污阈值的比较结果判断待检测盖板像素点是否为脏污像素点,并依据脏污像素点数判断所述待检测盖板是否处于脏污状态。以四个不同的图像作为测量样本,检测四个图像中的所有像素点的灰度值,提供了更多的检测样本,从而大大提高了检测结果和脏污状态判断结果的可靠性;
66.(2)先计算参照盖板相机的背景灰度图像比作为相机盖板脏污检测的参照,然后计算待检测盖板相机的检测灰度图像比,最后计算灰度比值,依据灰度比值与脏污阈值的
比较结果判断像素点是否为脏污像素点,依据脏污像素点数a_all判断待检测盖板是否处于脏污状态,判断步骤严谨且有序;
67.(3)先判断像素点是否为脏污像素点,然后再依据脏污像素点的个数来判断盖板是否处于脏污状态,避免了个别异常脏污像素点而造成的对相机盖板脏污状态的错误判断,提高了盖板脏污状态检测结果的准确度和精确度。
68.作为本发明一种优选的实施方式,在步骤s1之前,还包括对相机盖板和目标物体的定位步骤:
69.获取正常帧最远可量测距离和探测帧最远可量测距离,移动目标物体或相机盖板使目标物体与相机的距离为预设距离dis,预设距离dis大于探测帧最远可量测距离且小于正常帧最远可量测距离。其优点为,当目标物体与相机的距离为预设距离dis时,清洁盖板相机在向目标物体发射正常帧激光脉冲后,相机能接收目标物体反射回来的正常帧激光;清洁盖板相机在向目标物体发射探测帧激光脉冲后,探测帧不能接收到反射探测帧激光,因此清洁盖板相机接收不到探测帧灰度值;只有盖板脏污时相机才能接收到目标物体反射回来的探测帧激光,即脏污盖板相机可以接收到探测帧灰度值,增加了检测相机盖板是否脏污结果的可靠性和准确性。
70.正常帧最远可量测距离的获取步骤包括,对正常帧脉冲宽度tp1与光速c执行乘运算得到第一距离c
×
tp1,对第一距离与2执行除运算得到正常帧最远可量测距离(c
×
tp1)/2;
71.探测帧最远可量测距离的获取的步骤包括,对探测帧脉冲宽度tp2与光速c执行乘运算得到第二距离c
×
tp2,对第二距离与2执行除运算得到探测帧最远可量测距离(c
×
tp2)/2。正常帧脉冲宽度tp1大于探测帧脉冲宽度tp2。依据上述公式,可得到预设距离dis的取值范围为:(c
×
tp2)/2<dis<(c
×
tp1)/2。
72.作为本发明一种优选的实施方式,步骤s1中,通过具有参照盖板的相机获取目标物体的第一正常帧图像和第一探测帧图像的步骤包括:
73.设置固定周期,每一个固定周期均包括第一曝光时间和第二曝光时间,第一曝光时间和第二曝光时间交替设置;
74.通过具有参照盖板的相机向目标物体发射正常帧激光脉冲以在相机内形成第一正常帧图像,正常帧激光脉冲的曝光时间为第一曝光时间;
75.具有参照盖板的相机向目标物体发射探测帧激光脉冲以在相机内形成第一探测帧图像,探测帧激光脉冲的曝光时间为第二曝光时间。其优点为,通过参照盖板相机向目标物体发射正常帧激光脉冲和探测帧激光脉冲以分别获取第一正常帧图像和第一探测帧图像,以提高检测的像素点的样本数。
76.作为本发明一种优选的实施方式,步骤s1中,通过具有待检测盖板的相机获取目标物体的第二正常帧图像和第二探测帧图像的步骤包括:
77.通过具有待检测盖板的相机向目标物体发射正常帧激光脉冲以在相机内形成第二正常帧图像,正常帧激光脉冲的曝光时间为第一曝光时间;
78.具有待检测盖板的相机向目标物体发射探测帧激光脉冲以在相机内形成第二探测帧图像,探测帧激光脉冲的曝光时间为第二曝光时间;
79.正常帧激光脉冲的脉冲宽度tp1大于探测帧激光脉冲的脉冲宽度tp2,第一曝光时
间与第二曝光时间相等。其优点为,通过待检测盖板相机向目标物体发射正常帧激光脉冲和探测帧激光脉冲以分别获取第二正常帧图像和第二探测帧图像,以提高检测的像素点的样本数。正常帧激光脉冲的脉冲宽度大于探测帧激光脉冲的脉冲宽度,使得通过发射正常帧激光脉冲获取的正常帧图像与通过发射探测帧获取的探测帧图像的像素点的灰度值有所区别,从而使得后续的计算更加精准。第一曝光时间与第二曝光时间相等,保证第一正常帧图像和第一探测帧图像,以及第二正常帧和第二探测帧图像不会因曝光时间而影响其检测结果,提高盖板脏污状态判断的准确性和可靠性。
80.为提高检测灰度值和计算灰度值比值的准确性,本发明在步骤s1的基础上,还可以增加计算背景灰度图像比平均值和计算检测灰度图像比平均值的步骤,来提高相机盖板脏污状态检测结果的准确性和可靠性,计算背景灰度图像比平均值和计算检测灰度图像比平均值的步骤如下:
81.在每一个固定周期内通过具有参照盖板的相机获取一像素的第一正常帧灰度值和第一探测帧灰度值后,对第一正常帧灰度值与第一探测帧灰度值执行比值运算以得到背景灰度图像比,计算该像素的在若干连续的固定周期内获取的所有背景灰度图像比的总和除以固定周期的数量以得到背景灰度图像比平均值,得到背景灰度图像比平均值后,使用背景灰度图像比平均值替换背景灰度图像比;
82.在每一个固定周期内通过具有待检测盖板的相机获取该像素的第二正常帧灰度值和第二探测帧灰度值后,对第二正常帧灰度值与第二探测帧灰度值执行比值运算以得到检测灰度图像比,计算该像素的在若干连续的固定周期内获取的所有检测灰度图像比的总和除以固定周期的数量以得到检测灰度图像比平均值,得到检测灰度图像比平均值后,使用检测灰度图像比平均值替换检测灰度图像比。
83.使用背景灰度图像比平均值替换背景灰度图像比,使用检测灰度图像比平均值替换检测灰度图像比后,灰度比值等于检测灰度图像比平均值与背景灰度图像比平均值的比值,当判断灰度比值大于或等于脏污阈值时,判定像素为脏污像素点;当判断灰度比值小于脏污阈值时,判定待像素点为清洁像素点。上述在每个固定周期内分别计算背景灰度图像比和检测灰度图像比,并计算多个连续的固定周期内的背景灰度图像比平均值和检测灰度图像比平均值,从而避免了单个周期内检测的灰度值不准确的情况,从而降低了计算误差,进一步提高了本发明的判断相机盖板脏污状态的准确性和可靠性。
84.在一些实施方式中,固定周期的数量可以设置为3。在3个连续的固定周期内获取的背景灰度图像比分别为ratio_ref 1、ratio_ref2、ratio_ref3,则背景灰度图像比平均值ratio_ref_average的计算公式为
85.ratio_ref_average=(ratio_ref 1 ratio_ref2 ratio_ref3)/3;
86.在3个连续的固定周期内获取的检测灰度图像比分别为ratio_test 1、ratio_test 2、ratio_test 3,检测灰度图像比平均值ratio_test_average的计算公式为ratio_test_average=(ratio_test 1 ratio_test 2 ratio_test 3)/3。
87.灰度比值等于检测灰度图像比平均值与背景灰度图像比平均值的比值,则灰度比值k的计算公式为k=ratio_test_average/ratio_ref_average。
88.作为本发明一种优选的实施方式,步骤s1中,依据第一正常帧灰度值和第一探测帧灰度值得到背景灰度图像比的步骤包括:
89.计算第一正常帧图像的任一第一像素点的正常帧灰度值ir_ref1,计算第一探测帧图像的第二像素点的探测帧灰度值ir_ref2,第一正常帧图像中第一像素点的位置与第一探测帧图像中第二像素点的位置相同;
90.对第二像素点的探测帧灰度值ir_ref2与第一像素点的正常帧灰度值ir_ref1执行比值运算以得到背景灰度图像比ratio_ref,即ratio_ref=ir_ref2/ir_ref1。
91.作为本发明一种优选的实施方式,步骤s1中,依据第二正常帧灰度值和第二探测帧灰度值得到检测灰度图像比的步骤包括:
92.计算第二正常帧图像的第三像素点的正常帧灰度值ir_test1,计算第二探测帧图像的第四像素点的探测帧灰度值ir_test2,第二正常帧图像中第三像素点的位置和第二探测帧图像中第四像素点的位置均与第一正常帧图像中第一像素点的位置相同;
93.对第四像素点的探测帧灰度值ir_test2与第三像素点的正常帧灰度值ir_test1执行比值运算以得到检测灰度图像比ratio_test,即ratio_test=ir_test2/ir_test1。其优点为,选取第一正常帧图像中的任意一个第一像素点后,确定第一像素点的位置,并在第一探测帧图像、第二正常帧图像和第二探测帧图像中分别选取与第一正常帧图像中相同像素点位置的第二像素点、第三像素点和第四像素点,以保证其计算像素灰度值及灰度比值的准确性。
94.作为本发明一种优选的实施方式,图2为本发明实施例的判断待像素点的脏污状态流程图,参照图2,步骤s2中,依据灰度比值k与脏污阈值thres的比较结果判断像素点是否为脏污像素点的步骤包括:
95.s20:当判断灰度比值k小于脏污阈值thres,即k<thres时,判定像素点为清洁像素点;
96.s21:当判断灰度比值k大于或等于脏污阈值thres,即k≥thres时,判定待像素点为脏污像素点。
97.在一些实施方式中,可通过处理模块记录大于脏污阈值的像素点,用于后续统计像素点总数,以判断盖板的脏污状态及盖板的脏污状态。
98.作为本发明一种优选的实施方式,步骤s3中,依据脏污像素点数a_all判断待检测盖板是否处于脏污状态的步骤包括:
99.设置轻脏阈值thres_1、中脏阈值thres_2和重脏阈值thres_2,中脏阈值thres_2大于轻脏阈值thres_1,重脏阈值thres_3大于中脏阈值thres_2,即thres_1<thres_2<thres_3。
100.可说明的是,通过正常帧激光脉冲或探测帧激光脉冲射向目标物体时,相机盖板有脏污时,均不影响图像中的像素点总数。因此第一正常帧图像、第二正常帧图像、第一探测帧图像和第二探测帧图像中的像素点总数均相同。但盖板有脏污时,由于一部分脏污反射的激光与目标物体反射的激光在相机内重合,因此脏污像素点的灰度值比清洁像素点的灰度值大。因此盖板上有脏污时影响图像中的脏污像素点总数,若待检测相机盖板上有脏污,则第二正常帧图像和第二探测帧图像中的脏污像素点数相同。
101.依据脏污像素点数a_all与轻脏阈值thres_1、中脏阈值thres_2和重脏阈值thres_3的比较结果判断待检测盖板的脏污状态。其优点为,设置的轻脏阈值、中脏阈值和重脏阈值为盖板的脏污状态提供了判断标准,提高了判断盖板脏污状态的精确度。
102.作为本发明一种优选的实施方式,图3为本发明实施例的判断待检测盖板的脏污状态的流程图,参照图3,依据脏污像素点数与轻脏阈值、中脏阈值和重脏阈值的比较结果判断待检测盖板的脏污状态的具体步骤包括:
103.s30:当判断脏污像素点数a_all小于轻脏阈值thres_1,即a_all<thres_1时,判定待检测盖板处于整洁状态;
104.s31:当判断脏污像素点数a_all大于或等于轻脏阈值thres_1且小于中脏阈值thres_2,即thres_1≤a_all<thres_2时,判定待检测盖板处于轻度脏污状态;
105.s32:当判断脏污像素点数a_all大于或等于中脏阈值thres_2且小于重脏阈值thres_3,即thres_2≤a_all<thres_3时,判定待检测盖板处于中度脏污状态;
106.s33:当判断脏污像素点数a_all大于或等于重脏阈值thres_3,即a_all≥thres_3时,判定待检测盖板处于重度脏污状态。
107.在本发明一些实施例中,轻脏阈值thres_1可设置为第一正常帧图像中像素点总数pixels_all的10%,即thres_1=10%
×
pixels_all;
108.中脏阈值thres_2可设置为第一正常帧图像中像素点总数pixels_all的50%,即thres_2=50%
×
pixels_all;
109.重脏阈值thres_3可设置为第一正常帧图像中像素点总数pixels_all的80%,即thres_3=80%
×
pixels_all。
110.在一些实施方式中,上述通过具有参照盖板的相机获取的第一正常帧图像中的脏污像素点占第一正常帧图像上所有像素点的百分比小于10%,第一探测帧图像中的脏污像素点占第一探测帧图像上所有像素点的百分比小于10%,第一正常帧图像和第一探测帧图像中的脏污像素点数小于轻脏阈值thres_1,参照盖板为整洁状态。
111.本发明还提供一种检测装置,图4为本发明实施例的检测装置的结构示意图。参照图4,检测装置包括:
112.激光装置5,设置于相机盖板2的内侧,用于向目标物体1发射激光脉冲,以使成像传感器6获取第一正常帧图像、第一探测帧图像、第二正常帧图像和第二帧探测帧图像。激光装置5在一个固定周期内交替发射正常帧激光脉冲和探测帧激光脉冲。具体地,通过具有参照盖板的相机的激光装置5向目标物体1发射正常帧激光脉冲以获取第一正常帧图像,及发射探测帧激光脉冲以获取第一探测帧图像;通过具有待检测盖板的相机的激光装置5向目标物体1发射正常帧激光脉冲以获取第二正常帧图像,及发射探测帧激光脉冲以获取第二探测帧图像。
113.成像传感器6,设置于相机盖板2的内侧,与成像传感器6连接,用于依据第一正常帧图像获取第一正常帧灰度值,依据第一探测帧图像获取第一探测帧灰度值,依据第二正常帧图像获取第二正常帧灰度值,并依据第二探测帧图像获取第二探测帧灰度值;
114.处理模块3,与成像传感器6连接,用于对第一正常帧灰度值与第一探测帧灰度值执行比值运算以得到背景灰度图像比,对第二正常帧灰度值与第二探测帧灰度值执行比值运算以得到检测灰度图像比,并对检测灰度图像比与背景灰度图像比执行比值运算以得到灰度比值;
115.处理模块3还用于依据灰度比值与脏污阈值的比较结果判断第二正常帧图像或第二探测帧图像的像素点是否为脏污像素点,并依据脏污像素点数判断待检测盖板是否处于
脏污状态。
116.本发明的检测装置的优点在于:
117.本发明通过成像传感器6获取第一正常帧图像、第一探测帧图像、第二正常帧图像和第二探测帧图像,通过成像传感器6获取第一正常帧灰度值、第一探测帧灰度值、第二正常帧灰度值和第二探测帧灰度值,通过检测四个图像中的所有像素点的灰度值,提供了更多的检测样本,从而大大提高了检测结果和脏污状态判断结果的可靠性。通过处理模块3计算背景灰度图像比、检测灰度图像比及灰度比值,依据灰度比值与脏污阈值的比较结果判断像素点是否为脏污像素点,并依据脏污像素点数判断待检测盖板是否处于脏污状态,判断步骤严谨且有序,提高了盖板脏污状态检测结果的准确度和精确度。
118.在本发明一种具体的实施方式中,图5为本发明实施例的相机盖板与激光装置的位置示意图。参照图5,相机盖板2、目标物体1、激光装置5和成像传感器6的位置关系如图5。相机盖板2的左侧为相机盖板2的内侧,激光装置5、成像传感器6和激光装置5均位于相机盖板2的内侧。相机盖板2的右侧为相机盖板2的外侧,目标物体1位于相机盖板2的外侧。检测脏污像素点的原理如下:
119.参照图5,当相机盖板2上有脏污区域20时,激光装置5发出的激光脉冲经过脏污区域20的光线会被脏污区域20反射回来,其光线传播路径为l1,成像传感器6接收经脏污区域20反射回来的激光,从而形成的脏污像素点;
120.激光装置5发出的激光脉冲未经过脏污区域20时候,直接穿过相机盖板2而射到目标物体1上,经过目标物体1的反射再穿回相机盖板2内从而射到成像传感器6上,其光线传播路径为l2,成像传感器6接收经目标物体1反射回来的激光后形成正常脏污像素点;
121.相机盖板2清洁时,因为目标物体距相机距离超过相机的探测帧量程,激光装置5发射探测帧激光脉冲后,因此在相机盖板清洁状态下,成像传感器几乎接收不到目标物体反射的激光,背景灰度图像比很小,而检测灰度图像比不变;
122.当相机盖板2上有脏污时,激光装置5发射探测帧激光脉冲后,成像传感器6接收到脏污区域20反射的激光,脏污区域20反射的激光与目标物体反射的激光会有部分重合,从而使得成像传感器6接收的图像上的像素灰度值增大。因此检测灰度图像比增大,即脏污状态的盖板的检测灰度图像比大于清洁盖板的检测灰度图像比,以此来判断像素是否为脏污像素。确定脏污像素点后,后续可统计脏污像素的数量,并依据脏污像素数进一步判断盖板的脏污状态及脏污状态。
123.作为本发明一种优选的实施方式,参照图4,当处理模块3判断灰度比值大于或等于脏污阈值,判定像素点为脏污像素点;
124.当处理模块3判断灰度比值小于脏污阈值,判定像素点为清洁像素点。
125.判断待检测盖板是否处于脏污状态的步骤具体包括:
126.通过处理模块3对第二正常帧图像或第二探测帧图像执行脏污像素点统计运算以得到脏污像素点数;
127.当处理模块3判断脏污像素点数小于轻脏阈值,判定待检测盖板处于整洁状态;
128.当处理模块3判断脏污像素点数大于或等于轻脏阈值且小于中脏阈值,判定待检测盖板处于轻度脏污状态;
129.当处理模块3判断脏污像素点数大于或等于中脏阈值且小于重脏阈值,判定待检
测盖板处于中度脏污状态;
130.当处理模块3判断脏污像素点数大于或等于重脏阈值,判定待检测盖板处于重度脏污状态。
131.作为本发明一种优选的实施方式,参照图4,还包括指令触发模块8和控制模块7,指令触发模块8连接控制模块7。指令触发模块8每隔一个固定检测时间产生开机指令并将开机指令发送至控制模块7,控制模块7接收开机指令后,启动激光装置5、成像传感器6和处理模块3。其优点为,定时启动激光装置5、成像传感器6和处理模块3,以实现定时检测盖板脏污状态的功能,从而提高相机盖板状态判断的及时性和有效性,保证相机的测距准确度。
132.在一种具体的实施方式中,参照图4,在本发明的检测装置检测相机盖板的脏污度得到检测结果,并判断相机盖板处于脏污状态或清洁状态后,装置可暂时待机,以节省电量。指令触发模块8每隔一个固定检测时间产生开机指令,固定检测时间可以设置为5min,即指令触发模块8每5分钟产生一个开机指令,并将开机指令发送至控制模块7,即相机在每工作5分钟后,控制模块7接收开机指令后启动检测装置,以检测相机盖板的脏污状态。另外,在相机开机的时候,指令触发模块8也产生一个开机指令,使控制模块7控制检测装置启动,从而达到相机开机便能检测相机盖板的脏污状态的目的,提高相机盖板检测效率。
133.作为本发明一种优选的实施方式,参照图4,还包括报警模块4,报警模块4与控制模块7,控制模块7与处理模块3连接。当处理模块3判定盖板处于脏污状态时,指令触发模块8产生一报警指令并将报警指令发送至控制模块7,控制模块7接收报警指令后,启动报警模块4使报警模块产生报警信号。其优点为,当盖板处于脏污状态时,报警模块4产生报警信号,以提醒用户清洁盖板,以保证相机的测距准确度。
134.在一些具体的实施方式中,上述的报警模块4可以为一个或多个led报警灯。如报警模块可通过设置红色led、黄色led和绿色led(图中未示出)来显示相机盖板的脏污状态及脏污状态。通过控制模块7控制红色led、黄色led和绿色led的步骤如下:
135.当处理模块3判定相机盖板处于清洁状态时,控制模块7控制所有的led均处于熄灭状态;
136.当处理模块3判定相机盖板处于轻度脏污状态时,控制模块7控制绿色led亮起,其他led熄灭;
137.当处理模块3判定相机盖板处于中度脏污状态时,控制模块7控制黄色led亮起,其他led熄灭;
138.当处理模块3判定相机盖板处于重度脏污状态时,控制模块7控制红色led亮起,其他led熄灭。
139.虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。