1.本发明涉及复杂地质钻进过程智能控制领域,尤其涉及一种地质钻进过程钻速智能动态预测方法及系统。
背景技术:
2.资源能源安全是国家经济可持续发展的关键之一。保障资源能源安全应立足于国内。随着浅层矿产资源的日益枯竭、深部成矿理论的发展以及国内外大量深部矿产资源的探明使得深部地质勘探和开发成为必然。但是深部地质钻进过程中存在“三高一扰动”的复杂地质力学环境,非线性、强耦合、强干扰等特性突出,导致地质钻进过程效率低、安全性差。因此,建立地质钻进过程钻速预测模型是智能控制的前提,同时也是实现复杂地质钻进过程安全高效目标的重要基础。
技术实现要素:
3.为了解决上述问题,本发明提供了一种地质钻进过程钻速智能动态预测方法及系统,一种地质钻进过程钻速智能动态预测方法,主要包括以下步骤:
4.s1:根据钻进过程数据,分析钻速与钻进参数之间的相关关系,选择钻压、转速和井深作为所需建立的钻速智能动态预测模型的输入参数;
5.s2:分别运用滤波和重采样技术对钻进过程数据进行预处理,得到样本数据集和测试集;
6.s3:综合利用极限学习机、滑动窗口和十折交叉验证法技术,采用上述样本数据集和测试集对所述钻速智能动态预测模型进行训练和验证,得到最终的钻速智能动态预测模型;
7.s4:将实际获得的钻压、转速和井深输入至所述最终的钻速智能动态预测模型,得到地质钻进过程钻速智能动态预测结果。
8.进一步地,所述钻进参数有八种,分别为:钻压、转速、井深、泵量、扭矩、泵压、钩载、钻位。
9.进一步地,步骤s1具体包括:分析计算钻速与所述钻进参数之间的相关关系,得到扭矩、泵压、钩载和钻位与其他钻进参数之间存在较强的相关关系,而扭矩、泵压、钩载和钻位与钻速之间的相关关系则相对较弱,另外,泵量在地质钻进过程中调节频率较低,综上分析,将钻压、转速和井深作为所需建立的钻速智能动态预测模型的输入参数。
10.进一步地,步骤s2中具体包括以下过程:
11.1)运用滤波技术去除钻进过程数据中的毛刺和尖峰,以提高数据质量;
12.2)运用数据重采样技术,将钻进过程数据由时间域变换到深度域,用于去掉大量非正常钻进数据,为后续建立钻速智能动态预测模型奠定重要基础。
13.进一步地,步骤s3具体包括以下过程:
14.1)运用极限学习机方法建立钻压、转速、井深与钻速之间的关系模型,该关系模型
公式如下:
[0015][0016]
β=h
t
[0017]
式中,h是隐含层矩阵,β是隐含层到输出层的权值,g()是激活函数,x(i)是输入参数,隐含层节点数是k,ω
i
是输入层到隐含层的权值,b
i
是隐含层偏置, i=1,2,......,k,h
是h的moore
‑
penrose逆,t是输出向量;
[0018]
2)基于上述关系模型,引入滑动窗口技术,将钻速智能动态预测模型分为建模和预测两个部分,该钻速智能动态预测模型能够快速跟踪钻速的动态变化;
[0019]
3)运用十折交叉验证法确定所述钻速智能动态预测模型超参数,并建立钻速智能动态预测模型:
[0020][0021]
式中wob是钻压、rpm是转速、depth是井深,f()是滤波和重采样函数,ω
it
是第t次建模时的输入层到隐含层的权值,b
it
是第t次建模时的隐含层偏置, i=1,2,....,k,t
t
是第t次建模时的输出向量,k、t均为正整数;
[0022]
4)对钻进过程样本数据集进行归一化处理,利用归一化处理后的样本数据集对所述钻速智能动态预测模型进行训练;
[0023]
5)测试集的验证指标如下;
[0024][0025][0026]
式中,rmse是均方根误差,nrmse是归一化均方根误差,y
i
是测量数据,是预测数据,i表示第i组数据,n表示数据总组数;
[0027]
当上述验证指标的验证精度达到预设精度后,得到最终的钻速智能动态预测模型。
[0028]
一种地质钻进过程钻速智能动态预测系统,包括输入参数确定模块、预处理模块、模型确定模块、预测模块;
[0029]
输入参数确定模块,用于根据钻进过程数据,分析钻速与钻进参数之间的相关关系,选择钻压、转速和井深作为所需建立的钻速智能动态预测模型的输入参数;
[0030]
预处理模块,分别运用滤波和重采样技术对钻进过程数据进行预处理,得到样本数据集和测试集;
[0031]
模型确定模块,综合利用极限学习机、滑动窗口和十折交叉验证法技术,采用上述样本数据集和测试集对所述钻速智能动态预测模型进行训练和验证,得到最终的钻速智能动态预测模型;
[0032]
预测模块,将实际获得的钻压、转速和井深输入至所述最终的钻速智能动态预测模型,得到地质钻进过程钻速智能动态预测结果。
[0033]
进一步地,输入参数确定模块中,所述钻进参数有八种,分别为:钻压、转速、井深、泵量、扭矩、泵压、钩载、钻位。
[0034]
进一步地,输入参数确定模块中,分析计算钻速与所述钻进参数之间的相关关系,得到扭矩、泵压、钩载和钻位与其他钻进参数之间存在较强的相关关系,而扭矩、泵压、钩载和钻位与钻速之间的相关关系则相对较弱,另外,泵量在地质钻进过程中调节频率较低,综上分析,将钻压、转速和井深作为所需建立的钻速智能动态预测模型的输入参数。
[0035]
进一步地,预处理模块中,具体包括以下过程:
[0036]
1)运用滤波技术去除钻进过程数据中的毛刺和尖峰,以提高数据质量;
[0037]
2)运用数据重采样技术,将钻进过程数据由时间域变换到深度域,用于去掉大量非正常钻进数据,为后续建立钻速智能动态预测模型奠定重要基础。
[0038]
进一步地,模型确定模块中,具体包括以下过程:
[0039]
1)运用极限学习机方法建立钻压、转速、井深与钻速之间的关系模型,该关系模型公式如下:
[0040][0041]
β=h
t
[0042]
式中,h是隐含层矩阵,β是隐含层到输出层的权值,g()是激活函数,x(i)是输入参数,隐含层节点数是k,ω
i
是输入层到隐含层的权值,b
i
是隐含层偏置, i=1,2,......,k,h
是h的moore
‑
penrose逆,t是输出向量;
[0043]
2)基于上述关系模型,引入滑动窗口技术,将钻速智能动态预测模型分为建模和预测两个部分,该钻速智能动态预测模型能够快速跟踪钻速的动态变化;
[0044]
3)运用十折交叉验证法确定所述钻速智能动态预测模型超参数,并建立钻速智能动态预测模型;
[0045][0046]
式中wob是钻压、rpm是转速、depth是井深,f()是滤波和重采样函数,ω
it
是第t次建模时的输入层到隐含层的权值,b
it
是第t次建模时的隐含层偏置, i=1,2,....,k,t
t
是第t次建模时的输出向量,k、t均为正整数;
[0047]
4)对钻进过程样本数据集进行归一化处理,利用归一化处理后的样本数据集对所述钻速智能动态预测模型进行训练;
[0048]
5)测试集的验证指标如下;
[0049][0050][0051]
式中,rmse是均方根误差,nrmse是归一化均方根误差,y
i
是测量数据,是预测数据,i表示第i组数据,n表示数据总组数;
[0052]
当上述验证指标的验证精度达到预设精度后,得到最终的钻速智能动态预测模型。
[0053]
本发明提供的技术方案带来的有益效果是:提高了钻速智能动态预测的精确度,为复杂地质钻进过程智能控制研究奠定了良好的基础。
附图说明
[0054]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0055]
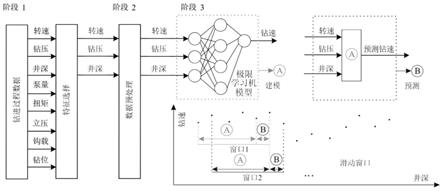
图1是本发明实施例中钻速智能动态预测模型结构图。
[0056]
图2是本发明实施例中原始数据分布图。
[0057]
图3是本发明实施例中预处理后数据分布图。
[0058]
图4是本发明实施例中钻速预测对比结果图。
具体实施方式
[0059]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0060]
本发明的实施例提供了一种地质钻进过程钻速智能动态预测方法及系统,其主要过程为:首先,构建如图1所示的钻速智能动态预测模型结构,将建模过程分为三个阶段,第一个阶段分析钻速与八种钻进参数之间的相关关系,选择钻压、转速和井深作为模型输入参数,第二个阶段分别运用滤波和重采样技术对钻进过程数据进行预处理,第三个阶段创新性的综合极限学习机、滑动窗口和十折交叉验证等多种技术实现了地质钻进过程钻速智能动态预测。具体步骤如下:
[0061]
(1)分析计算钻压、转速、井深、泵量、扭矩、泵压、钩载、钻位共八种钻进参数与钻速之间的相关关系,确定扭矩、泵压、钩载和钻位与其他钻进参数之间存在较强的相关关系而与钻速之间的相关关系相对不高;另外,考虑到泵量在地质钻进过程中调节频率较低。因此,将钻压、转速和井深作为所需建立的钻速智能动态预测模型的输入参数。
[0062]
(2)原始数据分布如图2所示,运用图1中所述第二阶段的数据预处理方法对原始钻进过程数据进行预处理,运用滤波技术去除钻进过程数据中的毛刺和尖峰,以提高数据质量,为后续建立钻速智能动态预测模型奠定重要基础;再运用数据重采样技术,将钻进过程数据由时间域变换到深度域,用于去掉大量非正常钻进数据,方便建立钻速模型,得到如图3所示的预处理后数据分布。
[0063]
综合利用极限学习机、滑动窗口和十折交叉验证法技术,采用样本数据集和测试集对所述钻速智能动态预测模型进行训练和验证,得到最终的钻速智能动态预测模型;具体包括以下过程:
[0064]
1)运用极限学习机方法建立钻压、转速、井深与钻速之间的关系模型,该关系模型公式如下:
[0065][0066]
β=h
t
[0067]
式中,h是隐含层矩阵,β是隐含层到输出层的权值,g()是激活函数,x(i)是输入参数,隐含层节点数是k,ω
i
是输入层到隐含层的权值,b
i
是隐含层偏置, i=1,2,......,k,h
是h的moore
‑
penrose逆,t是输出向量;
[0068]
2)基于上述关系模型,引入滑动窗口技术,将钻速智能动态预测模型分为建模和预测两个部分,该钻速智能动态预测模型能够快速跟踪钻速的动态变化;
[0069]
3)运用十折交叉验证法确定所述钻速智能动态预测模型超参数,并建立钻速智能动态预测模型:
[0070][0071]
式中wob是钻压、rpm是转速、depth是井深,f()是滤波和重采样函数,ω
it
是第t次建模时的输入层到隐含层的权值,b
it
是第t次建模时的隐含层偏置, t
t
是第t次建模时的输出向量;
[0072]
4)对钻进过程样本数据集进行归一化处理,利用归一化处理后的样本数据集对所述钻速智能动态预测模型进行训练;
[0073][0074]
其中,x
norm
是归一化后的数据集,x是真实的数据集,x
min
是数据集中最小的数据, x
max
是数据集中最大的数据;
[0075]
5)测试集的验证指标如下;
[0076][0077][0078]
式中,rmse是均方根误差,nrmse是归一化均方根误差,y
i
是测量数据,是预测数据,i表示第i组数据,n表示数据总组数,即y
i
是第i组实际测量数据,是第i组预测数据;
[0079]
当钻速智能动态预测模型的验证精度达到预设精度后,得到最终的钻速智能动态预测模型。
[0080]
(3)运用阶段三所提方法进行钻速智能动态预测,并与其他七种知名钻速预测方法进行对比,结果如图4所示。本发明所提方法可以快速跟踪钻速变化,实验结果验证了所提方法的有效性,为复杂地质钻进过程智能控制研究奠定了良好的基础。
[0081]
本发明的有益效果是:能够适应不同的地层条件,获得较高的钻速预测精度和较强的泛化能力,为复杂地质钻进过程智能控制研究奠定了良好的基础。
[0082]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

