1.本发明属于高精度导航领域,具体涉及一种高精度高频度接收机解算方法、解算系统及导航接收机。
背景技术:
2.随着经济技术的发展和人们生活水平的提高,导航技术已经广泛应用于人们的生产和生活当中,给人们的生产和生活带来了无尽的便利。
3.为满足多系统多频点的应用场景,尤其是针对定位定向的高可靠性需求,高精度导航接收机需要具备多系统多频点同时解算的特性。接收机获取的参与解算的有效卫星数目和信号分量越多,就越能提高定位的可靠性和定位精度;但是,对应也会增大解算耗时,增加系统负担,从而导致功能性能受限。这种情况,将使得接收机很难得到本质的提升和突破。
4.在传统的接收机解算方法中,将rtk引擎作为一个整体进行设计,rtk引擎负责rtk解算功能,主要包括两部分:模糊度解算和定位解算,先执行模糊度解算,得到整周模糊度结果之后再执行定位解算,其典型方案框图如图1所示:rtk引擎主要包括模糊度解算和定位解算两个部分;其中模糊度解算部分主要用于解算双差整周模糊度,然后定位解算部分将采用已解算得到的双差整周模糊度进行计算,从而得到基线向量的最优解,并最终计算得到用户接收机的高精度坐标位置。
5.在上述解算过程中,整个rtk引擎的求解运算过程主要集中在模糊度解算阶段;模糊度解算阶段占据整个解算耗时的90%以上。此外,在多系统多卫星多频点的应用场景下,观测方程矩阵的维数m
‑
1将会成倍增长,模糊度解算的计算量随之呈指数级增长。因此,传统的rtk解算过程,解算耗时巨大,很难达到高频度解算、低解算延时的应用需求。
技术实现要素:
6.本发明的目的之一在于提供一种能够实现高频度解算和低解算延时,而且精度较高、可靠性较好的高精度高频度接收机解算方法。
7.本发明的目的之二在于提供一种实现所述高精度高频度接收机解算方法的解算系统。
8.本发明的目的之三在于提供一种包括了所述高精度高频度接收机解算方法和解算系统的导航接收机。
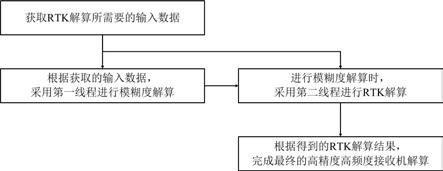
9.本发明提供的这种高精度高频度接收机解算方法,其特征在于包括如下步骤:s1. 获取rtk解算所需要的输入数据;s2. 根据步骤s1获取的输入数据,采用第一线程进行模糊度解算;解算时,采用设定的、低于系统配置的解算频度进行模糊度解算,从而降低系统的整体负担;s3. 进行模糊度解算的同时,采用第二线程进行定位解算;s4. 根据步骤s3得到的定位解算结果,完成最终的高精度高频度接收机坐标位置
计算;步骤s2采用第一线程进行模糊度解算,产生最新的整周模糊度解算结果;然后将得到的最新的整周模糊度解算结果更新到全局整周模糊度缓存中;步骤s3采用第二线程进行定位解算时,从全局整周模糊度缓存中获取整周模糊度并进行当前拍的定位解算;同时,在对全局整周模糊度缓存进行任何操作时,均采用互斥量对全局整周模糊度缓存进行防护,从而保证整周模糊度的完整性、操作的可靠性和安全性。
10.步骤s2和步骤s3进行同步计算时,采用第一线程进行模糊度解算的优先级低于采用第二线程进行定位解算的优先级。
11.所述的采用互斥量对全局整周模糊度缓存进行防护,具体为在操作全局整周模糊度缓存之前进行加锁,并在操作全局整周模糊度缓存完成之后进行解锁。
12.所述的设定的、低于系统配置的解算频度,具体为1hz。
13.步骤s1所述的rtk解算所需要的输入数据,具体包括nav电文信息,obs观测量信息和基准站的差分数据;同时,将所述的输入数据按照事先定义的数据结构和格式装订完成。
14.步骤s2所述的根据步骤s1获取的输入数据,采用第一线程进行模糊度解算,具体包括如下步骤:a. 采用如下算式作为某一时刻的双差载波相位定位方程式:式中为用户接收机u的跟踪卫星i和基准站r的跟踪卫星j的双差载波相位测量值;为载波波长;为跟踪卫星i的观测方向矢量;b
ur
为基线向量;为用户接收机u的跟踪卫星i和基准站r的跟踪卫星j的双差整周模糊度;b. 将步骤a的方程式写成如下线性矩阵形式:式中为接收机给出的双差载波相位测量值向量;为基线向量;n为需要被求解的双差整周模糊度向量;a和b均为常系数矩阵;c. 直接求解并得到满足步骤b的方程式的浮点型加权最小二乘解和;d. 以整数型整周模糊度n与步骤c得到的浮点型解之间的距离平方最小为目
标,搜索整周模糊度n,从而得到最优的整数解。
15.步骤s3所述的进行模糊度解算的同时,采用第二线程进行定位解算,具体包括如下步骤:a. 将步骤s2得到的整数解代入到方程式中,从而求解出基线向量的最优解;b. 将步骤a得到的最优解,结合基准站的三维坐标,求解得到用户接收机的高精度坐标位置;c. 进行步骤a和步骤b的计算时,要求定位解算频度与系统配置的解算频度一致,以保证每一拍都有实时的定位结果输出;d. 进行步骤a和步骤b的计算时,采用的整数解为最近更新的整数解。
16.在进行步骤s3的解算时,进行周跳探测,从而保证定位效果。
17.本发明还提供了一种实现上述高精度高频度接收机解算方法的解算系统,包括数据获取模块,第一线程模块,第二线程模块和输出模块;数据获取模块的输出端同时连接第一线程模块的输入端和第二线程模块的输入端;第一线程模块的输出端同时还连接第二线程模块的输入端;第二线程模块的输出端连接输出模块;数据获取模块用于获取rtk解算所需要的输入数据,并将数据下发至第一线程模块和第二线程模块;第一线程模块用于进行模糊度解算,并采用设定的、低于系统配置的解算频度进行解算,并将解算结果输出至第二线程模块;在第一线程模块进行模糊度解算时,第二线程模块同步进行定位解算,采用系统配置的频度进行解算,得到最终的高精度高频度接收机坐标位置结果,并将最终结果通过输出模块输出。
18.本发明还提供一种导航接收机,其包括了上述的高精度高频度接收机解算方法和解算系统。
19.本发明提供的这种高精度高频度接收机解算方法、解算系统及导航接收机,将rtk引擎中的模糊度解算和定位解算拆分开来,分别在不同的线程以不同的频度进行独立解算且线程之间进行整周模糊度的交互,降低了系统负担,减少了解算耗时,降低了解算延时,提高了解算频度,而且精度较高、可靠性较好。
附图说明
20.图1为现有的传统接收机的解算方法示意图。
21.图2为本发明方法的方法流程示意图。
22.图3为本发明方法的解算过程示意图。
23.图4为本发明方法的解算过程时序示意图。
24.图5为本发明系统的功能模块图。
具体实施方式
25.如图2所示为本发明方法的方法流程示意图:本发明提供的这种高精度高频度接收机解算方法,包括如下步骤(解算过程如图3所示):s1. 获取rtk解算所需要的输入数据;具体包括nav电文信息,obs观测量信息和基准站的差分数据;同时,将所述的输入数据按照事先定义的数据结构和格式装订完成;s2. 根据步骤s1获取的输入数据,采用第一线程进行模糊度解算;解算时,采用设定的、低于系统配置的解算频度(比如1hz)进行模糊度解算,从而降低系统的整体负担;具体包括如下步骤:a. 采用如下算式作为某一时刻的双差载波相位定位方程式:式中为用户接收机u的跟踪卫星i和基准站r的跟踪卫星j的双差载波相位测量值;为载波波长;为跟踪卫星i的观测方向矢量;b
ur
为基线向量;为用户接收机u的跟踪卫星i和基准站r的跟踪卫星j的双差整周模糊度;b. 将步骤a的方程式写成如下线性矩阵形式:式中为接收机给出的双差载波相位测量值向量;为基线向量;n为需要被求解的双差整周模糊度向量;a和b均为常系数矩阵;c. 直接求解并得到满足步骤b的方程式的浮点型加权最小二乘解和;d. 以整数型整周模糊度n与步骤c得到的浮点型解之间的距离平方最小为目标,搜索整周模糊度n,从而得到最优的整数解;在进行本步骤时,模糊度解算的频度不需要与系统配置的解算频度保持同步,可以采用较低的频度来执行模糊度解算;比如系统要求10hz定位解算,传统做法必须同步做10hz的整周模糊度求解,而本发明的做法可以采用1hz甚至更低的0.5hz等频度进行求解;由于本步骤的求解过程占据了整个接收机解算耗时90%以上,因此本发明方法降低了系统的整体负担;之所以能够使用较低的频度来执行模糊度解算,是因为接收机锁定某一卫星信号
时,双差整周模糊度值会长时间保持不变,直到卫星信号失锁重补或者发生周跳;但是,模糊度解算频度又不能太低了,因为在复杂环境下信号很容易发生周跳,如果不及时求解出新的整周模糊度,就会逐渐导致有正确的整周模糊度的卫星数目不够,使得定位精度变差或者无法固定;因此,本发明优选的模糊度解算频度为1hz,经过大量的实验数据证明,该频度在系统运算性能和固定解效果上可以达到很好的平衡;s3. 进行模糊度解算的同时,采用第二线程进行定位解算;具体包括如下步骤:a. 将步骤s2得到的整数解代入到方程式中,从而求解出基线向量的最优解;b. 将步骤a得到的最优解,结合基准站的三维坐标,求解得到用户接收机的高精度坐标位置;c. 进行步骤a和步骤b的计算时,要求定位解算频度与系统配置的解算频度一致,以保证每一拍都有实时的定位结果输出;d. 进行步骤a和步骤b的计算时,采用的整数解为最近更新的整数解;此外,在进行步骤s3的解算时进行周跳探测,从而保证定位效果;在本步骤中,整周模糊度n是已知量,它是利用模糊度解算步骤(步骤s2)已经求解出来的参与迭代计算;定位解算频度与系统配置的解算频度必须保持同频,一般为10hz、20hz等较高频度;这样一来连续多次的定位解算会使用相同的最新求解出的整周模糊度,直到下一次更新整周模糊度为才使用新的整周模糊度参与定位解算;当然与有可能会相同,图4是演示10hz 情况下的定位解算,是如何使用整周模糊度参与解算的时序图;虽然在短时间内保存不变,但还是会存在极低概率下某颗星的信号发生周跳,从而引起中对应的某一成员分量不能再用于定位解算了,如果参与反而会使得定位效果变差;因此非常有必要在定位解算中加入周跳探测技术,把发生周跳的卫星信号找出来予以剔除,保证定位效果最优;另外,也可以考虑在定位解算中加入模糊度保持和模糊度反推等技术以便达到更佳的定位效果;s4. 根据步骤s3得到的定位解算结果,完成最终的高精度高频度接收机坐标位置计算;步骤s2采用第一线程进行模糊度解算,产生最新的整周模糊度解算结果;然后将得到的最新的整周模糊度解算结果更新到全局整周模糊度缓存中;步骤s3采用第二线程进行定位解算时,从全局整周模糊度缓存中获取整周模糊度
并进行当前拍的定位解算;同时,在对全局整周模糊度缓存进行任何操作时,均采用互斥量对全局整周模糊度缓存进行防护,从而保证整周模糊度的完整性、操作的可靠性和安全性;采用互斥量对全局整周模糊度缓存进行防护具体为在操作全局整周模糊度缓存之前进行加锁,并在操作全局整周模糊度缓存完成之后进行解锁;具体实施时,步骤s2和步骤s3进行同步计算时,采用第一线程进行模糊度解算的优先级低于采用第二线程进行定位解算的优先级。
26.以下结合一个具体实施例,对本发明方法进行进一步说明:导航接收机使用arm a7处理器800mhz主频进行三星六频rtk定位解算,三星六频分别为北斗b1、b2,gps的l1、l2和glo的l1、l2,模糊度解算频度设置为1hz(要求每秒解算一次),定位解算频度分别配置为20hz(要求1秒内解算20次,即每50ms解算一次),运行步骤如下:(1) t1整秒时刻,rtk引擎获取到本接收机的北斗14颗双频星、gps 10颗双频星、glo 7颗双频星的观测值,和来自基准站的共视卫星的观测值,两者一起组装到obs数据结构中;同时,所有卫星的导航电文信息全部接收完成,组装到nav数据结构中。
27.(2) t1整秒时刻,第一线程模糊度解算和第二线程定位解算都满足执行时机,各自启动执行。系统优先执行高优先级的第二线程,秒内第一拍定位解算使用之前存储好的整周模糊度n0,第一拍解算完成耗时16.8ms。
28.(3) t1 16.8ms时刻,开始执行第一线程模糊度解算,运行了33.2ms之后还未完成,秒内第二拍定位解算时机到来。
29.(4) t1 50ms时刻,秒内第二拍定位解算启动执行,抢断模糊度解算,组装obs和nav并继续使用之前存储好的整周模糊度n0, 第二拍定位解算完成耗时15.9ms。
30.(5) t1 65.9ms时刻,继续步骤(3)的模糊度解算,运行2.8ms之后,完成了模糊度解算得到最新的整周模糊度n1并更到到全局模糊度缓存中,模糊度解算总耗时36ms。
31.(6) t1 100ms时刻,秒内第三拍定位解算启动执行,组装obs和nav并使用更新的整周模糊度n1,第三拍定位解算完成耗时16.5ms。
32.(7) t1 150ms时刻,秒内第四拍定位解算启动执行,组装obs和nav并继续使用更新的整周模糊度n1,第四拍定位解算完成耗时16.3ms。
33.……
(8) t1 950ms时刻,秒内第二十拍定位解算启动执行,组装obs和nav并继续使用整周模糊度n1,第二十拍定位解算完成耗时16.6ms。
34.(9)t2整秒时刻,t2为t1的下一秒,把t2当作t1,n1当作n0继续重复步骤(1)。
35.(10) 步骤(2)中,在接收机开机的时候n0是没有的,第二线程定位解算得不到定位结果,导航接收机的第一个定位结果输出会在步骤(6)中给出。
36.(11) 步骤(5)和步骤(6)会存在同时操作全局模糊度缓存的可能性,导航接收机引入互斥量防护技术消除了多线程同时操作的灾难性后果。
37.以下对传统的单线程rtk解算方法和本发明所述的双线程rtk解算方法进行性能对比:导航接收机使用arm a7处理器800mhz主频进行三星六频rtk定位解算,模糊度解
算频度设置为1hz,定位解算频度分别配置为10hz、20hz和50hz,对比传统方法和本发明所述方法的实验结果数据如下表1所示:表1实验数据对比示意表从上表数据可以看出:使用传统方法只能勉强达到20hz的解算频度,对于50hz频度就已经无法支持了。而使用本发明所述的解算方法,接收机系统的cpu使用率和解算总耗时都大大降低,系统负担下降为传统方法的49%左右,能够支持到更高频度的50hz解算,改善效果非常明显。
38.如图5所示为本发明系统的功能模块图:本发明还提供了一种实现上述高精度高频度接收机解算方法的解算系统,包括数据获取模块,第一线程模块,第二线程模块和输出模块;数据获取模块的输出端同时连接第一线程模块的输入端和第二线程模块的输入端;第一线程模块的输出端同时还连接第二线程模块的输入端;第二线程模块的输出端连接输出模块;数据获取模块用于获取rtk解算所需要的输入数据,并将数据下发至第一线程模块和第二线程模块;第一线程模块用于进行模糊度解算,采用设定的、低于系统配置的解算频度进行解算以节省耗时,并将解算结果输出至第二线程模块;在第一线程模块进行模糊度解算时,第二线程模块同步进行定位解算,采用系统配置的频度进行解算,得到最终的高精度高频度接收机坐标位置结果,并将最终结果通过输出模块输出。
39.本发明的价值主要体现在以下几个方面:(1)有效降低接收机的系统负担,cpu使用率下降至传统方法的49%左右,满足绝大多数场景对中低端cpu的需求,降低接收机软硬件的设计难度;(2)现如今越来越多应用领域,特别是无人机和智能驾驶等领域,对高精度接收机的解算频度和解算延时提出了更高的需求,通过传统的解算方法进行极致的局部优化很难达到预期效果,必须在系统架构层面进行优化,通过全新的架构能有效减少解算耗时,降低解算延时,提高解算频度,有助于高精度接收机应用在更多的领域;(3)提高了定位解算的可靠性,当系统运算性能不再是瓶颈之后,就可以在rtk引擎中加入更多的卫星,更多的信号分量和更多的策略,这些都能使rtk定位解算更加可靠。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

