1.本技术涉及水利测绘的技术领域,尤其是涉及一种水利工程测绘方法。
背景技术:
2.水利工程指用于控制和调节自然界的水资源,以达到消除灾害、为人类服务目的的工程建筑。水利工程可以对自然界的地表水和地下水进行有效的控制,通过对水资源进行合理地调配,不仅可以有效控制洪涝灾害的发生,还能为人类的生活服务。因此,水利工程对于社会的发展具有重要的作用。
3.水利工程的测绘指对水利工程中的自然地理要素或者人工设施的外形、尺寸、空间位置及其属性等数据进行采集和分析,有利于对水利工程进行更好的管理使用和规划,对于更好地发挥水利工程的作用具有积极的意义。传统对于水利工程的测绘和测量,具有费时费工、精度不均匀的缺点。随着全球定位技术(gps)以及实时动态测量(rtk)的发展,采用gps
‑
rtk技术对水利工程进行测绘既能保证很高的精度,又具有实时性和高效性,可以大大提高测绘的效率。
4.目前,相关技术中,采用gps
‑
rtk技术对水利工程进行测绘包括以下步骤:首先成立测量小组,通过查询资料、实地考察等方式了解测绘区的现场环境以及测图项目的距离,并据此绘制出所需测量的初级图纸。在已知点或任意点架设rtk基准站,并根据已知控制点信息进行数据校核,之后基准站开始工作连续跟踪观测所有可见卫星。建立移动站,将gps接收机安装在背包里,天线安装在背包上。启动rtk流动站,完成初始化后,负责测量人员背着移动站来到地形地貌碎部点进行实地数据采集,每个碎部点采集时间为2s。同时,基准站对卫星进行连续测量并计算出距离修正值;基准站通过无线电传输方式,实时地将修正值发送给移动站,移动站通过相对定位的原理,得到碎部点准确的位置数据。调用这些位置数据,进行图像编辑,对初级图纸进行修正得到最终的测绘图纸。
5.针对上述相关技术,发明人认为由于水利工程的占地面积较大,且不少水利工程建设在地势险要之处,地势起伏不平;故测量人员持移动站到碎部点进行实地测量耗时费力,测绘效率低下。
技术实现要素:
6.为了节省人力物力,提高水利工程测绘的效率,本技术提供了一种水利工程测绘方法。
7.本技术提供的一种水利工程测绘方法,采用如下技术方案:一种水利工程测绘方法,包括以下步骤:在无人机上搭载相机,操控所述无人机飞临水利工程上方获取其影像数据;根据所得影像数据绘制初级图纸;选取基准点并安装gps接收机构,采集所述基准点的位置数据;在无人机上搭载gps接收机构;操控所述无人机使其飞至水利工程的各个碎部点
处,采集碎部点的位置数据,并依据所述基准点的位置数据修正得到碎部点的位置信息;调取各个所述碎部点的位置信息,对所述初级图纸进行修正,得到最终图纸。
8.通过采用上述技术方案,无人机搭载gps接收机构而构成移动站,通过操控无人机,可以使移动站快速移动到各个碎部点,并对该点进行数据的采集;减少了测量人员的来回奔波,节省了人力和物力,大大提高了测量的效率。而且由于无人机可以到达一些测量人员较难到达的位置,从而可以获取到一些难以测量的碎部点的数据,提高测绘的准确度。同时,采用无人机搭载相机的方式获取水利工程的影像数据并绘制初级图纸,同样节省了测量人员实地考察的来回奔波,提高了工作效率。
9.可选的,所述基准点和无人机之间的距离控制在15km之内。
10.通过采用上述技术方案,可以保证基准站和移动站之间的通讯顺畅,保证基准站可以实时将修正值传送给移动站,提高了所得碎部点位置信息的精确性。
11.可选的,所述无人机在碎部点进行数据采集时,保证可供观测的卫星个数不少于5个;所述无人机采集每个碎部点数据的时间为1
‑
3s。
12.通过采用上述技术方案,可以提高采集数据信息的准确性,从而提高了对水利工程测绘的精度,进而提高了最终所得测绘图纸的准确性。
13.可选的,所述基准点设置在地势开阔处。
14.通过采用上述技术方案,能够减少不必要的遮挡和屏蔽,使gps接收机构可以跟踪观测到更多的卫星,增强了基准站的传输信号,从而提高了水利工程的测绘效果。
15.可选的,搭载gps接收机构的所述无人机设置多架。
16.通过采用上述技术方案,可以构建多个独立的移动站并进行同步测量,从而可以进一步提高水利工程测绘的效率。
17.可选的,所述无人机搭载的相机为数码相机或光谱相机。
18.通过采用上述技术方案,数码相机只能拍摄目标的形影图像,但是设备价格便宜;而光谱相机即成像光谱仪除了图像信息外,还可以看到物质更多的信息。在实际测绘时,可以根据测绘要求,灵活选择相机的种类。
19.可选的,所述无人机包括机身以及分别设置在机身上的螺旋桨、支撑脚及吊舱;所述吊舱通过减震件设置在机身的下表面;所述减震件为中空结构,其下表面设置有内凹的吊舱安装槽;所述减震件的下表面还设置有环绕在吊舱安装槽外的第一波纹部,所述第一波纹部的波纹前进方向与第一波纹部的径向相同;所述减震件的侧面设置有环绕减震件一周的第二波纹部,所述第二波纹部的波纹前进方向与竖直方向相同。
20.通过采用上述技术方案,通过减震件的中空结构以及第一波纹部、第二波纹部的配合设置,可以延长震动的传播路径,增加了震动的损耗,从而使在减震件上传播的震动明显衰减,进而减少了到达吊舱安装槽的震动,故可以对吊舱起到有效的减震作用。该设置不仅可以降低设置在吊舱中的ccd数码相机、gps接收机构等仪器受震动的影响,起到保护仪器、延长仪器使用寿命的作用;同时也可以提高这些仪器的检测准确度。
21.可选的,所述减震件呈圆柱状,其上表面与机身的下表面连接;所述减震件、吊舱安装槽及第一波纹部同轴设置。
22.通过采用上述技术方案,使整体结构更加紧凑,同时能够更好地发挥减震件的减
震作用,从而提高了对ccd数码相机、gps接收机构等仪器的保护,并提高了这些仪器的检测准确度。
23.可选的,所述减震件中空结构内填充聚氨酯发泡材料。
24.通过采用上述技术方案,填充聚氨酯发泡材料后,第一波纹部和第二波纹部仍然可以发挥减震的作用。同时,填充聚氨酯发泡材料可以提高减震件的结构强度,从而使ccd数码相机、gps接收机构等仪器的吊接更加稳固,提高了安全性。
25.可选的,所述减震件还设置天线导管,所述天线导管一端与吊舱安装槽连通,另一端与机身上表面连通;所述吊舱设置与天线导管相配合的通孔。
26.通过采用上述技术方案,通过天线导管和通孔的配合,gps接收机构的天线可以从吊舱中伸出到无人机上方,从而可以减少对天线的遮挡,提高水利工程测绘的准确度。
27.综上所述,本技术至少包括以下有益技术效果之一:1.本技术通过采用无人机搭载gps接收机构搭建移动站,通过操控无人机对各个碎部点进行数据获取;相比于测量人员携带gps接收机构到各个碎部点进行实地测量,本技术减少了测量人员的来回奔波,从而节省了水利工程测绘所耗的人力和物力,大大提高了水利工程测绘的效率。而且无人机可以停到测量人员难以达到的位置,可以获取到更多碎部点的数据,有利于提高测量的准确度。
28.2.本技术采用无人机搭载相机获取水利工程的影像数据,并以此作为绘制初级图纸的根据;相比于测量人员实地考察,本技术节省了人力和物力,提高了工作效率;而且所获得的数据更加精确。
29.3.本技术通过在地势开阔处设置基准点,减少了遮挡和屏蔽,可以使基准站的gps接收机构观测到更多卫星,同时也能保证基准站发出的传输信号的强度,从而能够提高测绘的准确性。
30.4.本技术采用多架无人机构建多个独立的移动部并进行同步信息采集,有利于提高水利工程测绘的效率。
31.5.本技术的无人机安装有减震件,通过减震件的中空结构以及第一波纹部和第二波纹部的设置,可以增加震动的传播路径,提高了震动的损耗,从而减弱了到达吊舱安装槽的震动,进而使设置在吊舱安装槽中的吊舱受到的震动减弱。这样可以保护安装在吊舱中的ccd数码相机、gps接收机构等仪器,延长了这些仪器的使用寿命;同时也可以使这些仪器的检测受震动影响较小,从而提高了仪器的检测准确度。另外,通过第一波纹部和第二波纹部的相配合,可以同时应对来自水平和竖直各个方向的震动,使减震件对吊舱以及安装在其内部的仪器的保护更全面,有利于提高减震的效果。
32.6.本技术减震件中设置聚氨酯发泡材料,一方面,第一波纹部和第二波纹部仍然能够发挥减震的作用;另一方面,可以增强减震件的强度,提高吊舱的稳固性。
附图说明
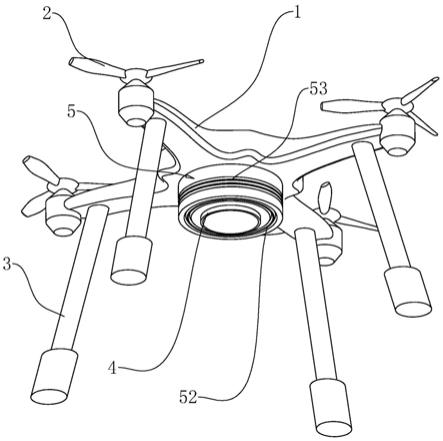
33.图1是本技术实施例3的无人机的立体示意图。
34.图2是本技术实施例3的无人机的局部剖视图。
35.图3是本技术实施例3的无人机另一个角度的立体示意图。
36.图4是本技术实施例4的无人机的减震件的剖视图。
37.附图标记说明:1、机身;2、螺旋桨;3、支撑脚;31、橡胶弹性套;4、吊舱;41、通孔;5、减震件;51、吊舱安装槽;52、第一波纹部;53、第二波纹部;54、天线导管;55、聚氨酯发泡材料;6、太阳能电池板。
具体实施方式
38.目前,在水利工程的测绘中,对于各个碎部点位置数据的采集会采用测量人员携带gps接收机构实地采集的方式进行。但是水利工程占地面积较大,且不少设施地势险要,从而需要耗费不少人力和物力才能完成达到实地进行测量的目的,工作效率较低。发明人通过研究发现,无人机具有良好的速度和机动性,且受地形影响较小,可以迅速且准确地到达指定位置;在无人机上搭载gps接收机构可以快速达到各个碎部点并获取位置数据,有利于提高测绘的效率。本技术即是在此基础上得出的。
39.以下结合附图1
‑
4和实施例对本技术作进一步详细说明。
40.实施例1本技术实施例公开了一种水利工程测绘方法,所要测绘的对象为用于防洪抗旱的水利工程,其具有建设在河道上的水坝。本实施例测绘的目的是完成坝区地形图的绘制。
41.本实施例的水利工程测绘方法包括以下步骤:s1、前期准备:查阅资料,了解所要测绘的水利工程的概况、背景资料以及周边环境。
42.s2、获取影像数据:在无人机上装载好ccd数码照相机并调试完成。选择晴空、风速小于3级的气象条件操控无人机飞临水利工程上方,获取水利工程的影像数据。
43.s3、绘制初级图纸:根据所得的水利工程的影像数据绘制初级图纸。绘制的方法可采用常规的方法,如人工绘制或者常规图像处理软件绘制,在此不做赘述。
44.s4、gps测量:本实施方案具体采用gps
‑
rtk技术进行测量。
45.s401、选择基准点,可选择已知点或任意未知点;本实施方案中,选择位于水坝上,地势开阔、遮挡少的未知点作为基准点并架设gps接收机构构建基准站;选择地势开阔、遮挡少处设置基准点,可以减少遮挡和屏蔽,保证gps接收机构可以接收到更多的卫星,增强了基准站和移动站之间的信号传输,从而提高了水利工程测量的准确性。之后对该基准点进行数据校正;具体为:在无人机上搭载gps接收机构构建移动站,选择视野良好处操作无人机飞至已知控制点采集位置数据,进行数据校正;为保证精确性,可使移动站到三个已知控制点采集数据进行数据校正。
46.s402、确定本水利工程的各个碎部点后;操作无人机,使移动站运动到各个碎部点;无人机降落停稳后gps接收机构采集该处的位置数据,每处采集数据时间控制为1s。同时基准站连续跟踪观测所有可见卫星,根据基准站(即基准点)的位置数据,计算出基准站到卫星的修正数,并发送出去;移动站接收到修正数并与采集的位置数据相计算即可得到碎部点的精确位置信息。
47.其中,为保证通讯的顺畅,基准站(基准点)和移动站(无人机)之间的距离控制在15km之内;本实施方案中,两者距离保持在5km之内。同时,为保证测量的准确性,移动站在碎部点进行数据采集时,保证可供观测的卫星个数不少于5个。另外,可在无人机上搭载常规的实时影像机构,从而保证无人机飞临和测量的位置准确。
48.s5、调取各个碎部点的位置和数据信息,计算距离、高度、位置关系等信息;通过手工或常规图像软件的操作对初级图纸进行修正,从而得到最终坝区地形图。
49.需要说明的,本实施方案中所采用的无人机可选择尺寸和重量符合搭载要求的各类常规机型,在本实施方案中不做特别限定。
50.实施例2本技术实施例公开了一种水利工程测绘方法,所要测绘的水利工程为水库。本实施例测绘的目的是完成坝区地形图、库区地形图的绘制以及南、北干渠的定线。
51.本实施例的水利工程测绘方法与实施例1类似,包括以下步骤:s1、前期准备:查阅资料,了解所要测绘的水利工程的概况、背景资料以及周边环境。
52.s2、获取影像数据:在无人机上装载好成像光谱仪(光谱相机)并调试完成。选择晴空、风速小于3级的气象条件操控无人机飞临水利工程上方,获取水利工程的影像数据。
53.s3、绘制初级图纸:根据所得的水利工程的影像数据绘制初级图纸。
54.s4、gps测量:本实施方案具体采用gps
‑
rtk技术进行测量。
55.s401、选择基准点,本实施方案中选择位于一处地势开阔、遮挡少的高坡上的已知控制点作为基准点并架设gps接收机构构建基准站。在通过常规方法进行数据校核后,基准站开始工作连续跟踪观测所有可见卫星。
56.s402、取两架无人机并分别搭载gps接收机构,从而构建两个独立的移动站。分别操作无人机运动到对应的碎部点;采集该处的位置数据,每处采集数据时间控制为3s。同时基准站连续跟踪观测所有可见卫星,根据基准站的位置数据,计算出基准站到卫星的修正数,并发送出去;移动站接收到修正数并与采集的位置数据相计算得到碎部点的精确位置信息。由于本实施例中测绘的量较大,故采用两个独立的移动站同步进行测量,保证水利工程测绘的效率。同时,为保证通讯的顺畅,本实施方案中,基准站(基准点)和移动站(无人机)之间的距离控制在10km之内。
57.另外,还可以在无人机上搭载声呐水深探测仪,操作无人机飞临到所测水利工程所对应的水面的上方,沿需要测量的断面飞行并获取数据;通过gps接收机构和声呐水深探测仪的配合,即可获得目标位置水下的数据信息,从而有利于南、北干渠的定线,也能对水道的水下地形进行测量。相比于常规的采用测量船测量的方法,采用无人机测量更加灵活。
58.s5、调取各个碎部点的位置和数据信息,计算距离、高度、位置关系等信息对初级图纸进行修正,从而得到最终所需水利工程的测绘图纸。
59.实施例3本实施例和实施例1基本相同,不同之处在于,在本实施方案中,所采用的无人机的结构如下:参照图1,无人机包括机身1、螺旋桨2、支撑脚3以及吊舱4。其中,螺旋桨2设置四个,分别均匀安装在机身1的上表面的四个角上,为无人机的飞行提供动力。为了提高无人机的动力,在其他的一些实施方案中,无人机的螺旋桨2的数量也可根据实际承载的重量而增加。支撑脚3也设置四个,分别均匀安装在机身1的下表面的四个角上,为无人机的降落提供支撑。吊舱4通过减震件5设置在机身1下表面的中心位置,位于四个支撑脚3之间。
60.参照图1和图2,减震件5为中空的圆柱形结构,并竖直设置。减震件5的上表面通过
紧固件与机身1的下表面连接,其下表面设置有内凹的吊舱安装槽51;吊舱安装槽51开口朝下、底部朝上,并且与减震件5同轴设置。吊舱4同轴安装在吊舱安装槽51内;吊舱4内具有若干仪器支架和电源、信号接口,用于安装ccd相机、成像光谱仪、gps接收机构、声呐水深探测仪或其他相关仪器。仪器支架和电源、信号接口均采用常规结构,在此不做赘述。
61.参照图2,减震件5还设置有天线导管54;该天线导管54呈竖直设置,其一端开口位于吊舱安装槽51的底部中心处,另一端开口位于机身1的上表面处。相应的,吊舱4开设与天线导管54相配合的通孔41,两者同轴设置。通过天线导管54和通孔41的设置,可使安装在吊舱4中的gps接收机构的天线从吊舱4中伸出到无人机上方,从而减少了无人机对gps接收机构天线的遮蔽,提高了信号的接收和输出效果,进而提高了水利工程测绘的准确度。
62.参照图1和图2,减震件5的下表面还设置有第一波纹部52;第一波纹部52呈环形,同轴环绕在吊舱安装槽51的外侧。第一波纹部52的波纹前进方向与该波纹部的径向相同。同时,在减震件5的侧面还设置有第二波纹部53;第二波纹部53环绕减震件5一周,且第二波纹部53的波纹前进方向与竖直方向相同。由于第一波纹部52、第二波纹部53的波纹结构,并配合以减震件5的中空结构,可以延长震动的传播路径,增加震动的损耗,从而可以减少传递到吊舱4上的震动,使减震件5对吊舱4起到缓震的作用。因此,通过减震件5的设置能够对吊舱4中设置的ccd数码相机、gps接收机构等仪器起到保护的作用,延长了仪器的使用寿命;同时也能够减小ccd数码相机、gps接收机构等仪器在工作时所受震动的影响,提高了这些仪器测量水利工程时的准确度。同时,通过第一波纹部52和第二波纹部53的相配合,可以同时应对来自水平和竖直各个方向的震动,对于吊舱4以及安装在其内部的仪器的减震保护更加完备。另外,为了进一步提高减震的效果,第一波纹部52和第二波纹部53的波峰和波谷设置为尖角形。
63.参照图3,为了减少无人机在降落时的震动,支撑脚3底部套设有橡胶弹性套31。同时,无人机机身1的上表面还设置太阳能电池板6,可以提高无人机的续航能力。
64.实施例4参照图4,本实施例和实施例3基本相同,不同之处在于,减震件5的中空结构内填充聚氨酯发泡材料55。通过该设置,第一波纹部52和第二波纹部53仍然可以发挥减震的作用,同时还提高了减震件5的结构强度,使吊舱4连接得更加稳固,使安装在吊舱4内的ccd数码相机、gps接收机构等仪器更加稳定可靠,安全性更高。
65.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

