1.本发明涉及三维激光雷达技术领域,尤其涉及一种基于双光楔的三维激光雷达成像系统和方法。
背景技术:
2.三维激光雷达作为二维激光雷达的迭代产品,其不光具备了二维雷达在slam导航中的作用,同时也具备了很多二维雷达所不能实现的功能。其被广泛的应用于自动驾驶、地形测绘等相关工作。
3.传统三维雷达大多采用固态雷达或机械雷达等多线方式,这种传统雷达的点云密度完全取决于激光线束,激光线束越多,所采集到的点云数据越多,进而探测的精确度越高。尽管这类传统雷达从16线到64线每增加一个激光线束所测量的精度呈几何方式上升,但是其价格和生产难度同样也翻倍增加。目前大多数例如16、64线等高精度激光雷达在生产上依旧采用手工方式进行安装调试,同时随着线束的增加其体积也会增加使其安装使用更加复杂。
技术实现要素:
4.针对上述技术问题,本发明提供了一种基于双光楔的三维激光雷达成像系统和方法。
5.本发明实施例的第一方面提供一种基于双光楔的三维激光雷达成像方法,所述三维激光雷达包括双光楔,所述双光楔包括第一光楔和第二光楔,分别与所述第一光楔和所述第二光楔连接的转动装置,激光光源,感光元件,编码器闭环,所述方法包括:
6.所述转动装置带动所述第一光楔和所述第二光楔同向运动或相向运动;
7.通过所述转动装置和所述编码器闭环控制所述第一光楔,所述第二光楔的转速;
8.由所述激光光源发射的激光脉冲沿所述双光楔的光轴进入所述双光楔,经过所述双光楔发生折射后投射到外界;
9.在预设时间内接收外界物体反射回来的回波信号,并根据所述回波信号生成点云图像。
10.可选地,所述三维激光雷达包括补偿镜筒,所述第一光楔、所述第二光楔分别包括上表面和下表面,靠近所述第一光楔和所述第二光楔的楔角的上表面为外环,远离所述第一光楔、所述第二光楔的楔角的下表面为内环,所述双光楔安装于所述补偿镜筒内部,所述方法包括:
11.增加所述双光楔外环质量,根据所述外环和所述内环的质量差、所述补偿镜筒控制所述双光楔转动惯量。
12.可选地,根据所述外环和所述内环的质量差、所述补偿镜筒控制所述双光楔转动惯量的步骤包括:
13.计算所述第一光楔的外环和内环的第一质量差;
14.计算所述第二光楔的外环和内环的第二质量差;
15.根据所述第一质量差增加靠近所述第一光楔的外环部分的所述补偿镜筒的质量;
16.根据所述第二质量差增加靠近所述第二光楔的外环部分的所述补偿镜筒的质量。
17.可选地,所述三维激光雷包括半透半反镜,由所述激光光源发射的激光脉冲沿所述双光楔的光轴进入所述双光楔的步骤包括:
18.所述激光脉冲经过所述半透半反镜反射后沿所述双光楔的光轴进入所述双光楔。
19.可选地,所述接收外界物体反射回来的回波信号的步骤包括:
20.所述回波信号通过所述双光楔进入所述三维激光雷达;
21.所述回波信号穿过所述半透半反镜;
22.所述感光元件接收所述回波信号。
23.本发明实施例第二方面提供了一种基于双光楔的三维激光雷达成像系统,所述系统沿光轴从左到右依次设置有感光元件,半透半反镜和双光楔,所述半透半反镜竖直方向设置有至少一个激光光源,所述双光楔包括第一光楔和第二光楔,所述第一光楔和所述第二光楔分别连接有转动装置,所述转动装置控制所述第一光楔和所述第二光楔绕其轴线旋转。
24.可选地,所述转动装置包括电机。
25.可选地,所述系统还包括编码器闭环和中央处理器,所述编码器闭环连接所述转动装置,通过所述编码器闭环检测所述双光楔的转速值,并将所述转速值发送给所述中央处理器,所述中央处理器根据所述转速值向所述转动装置发送控制指令控制所述第一光楔和所述第二光楔的旋转速度。
26.可选地,所述第一光楔和第二光楔的楔角相同。
27.可选地,所述中央处理器根据所述转速值向所述转动装置发送控制指令控制所述第一光楔和所述第二光楔的旋转速度的步骤,包括:
28.所述中央处理器对所述转速值进行解析;
29.判断所述转速值是否为所述第一光楔的转速值或所述第二光楔的转速值;
30.当判定所述转速值为所述第一光楔的转速值时,向所述转动装置发送第一转速控制指令;
31.当判定所述转速值为所述第二光楔的转速值时,向所述转动装置发送第二转速控制指令。
32.本发明提供的基于双光楔的三维激光雷达成像系统包括双光楔,双光楔包括第一光楔和第二光楔,当两个光楔的转速、大小以及方向不同时,激光光源进入双光楔折射成以二维的运动轨迹延一定角度射出,角度不同呈现的图形不同,由于激光光线是由激光光源持续发射出来,双光楔也持续旋转,每一时刻的激光光线通过双光楔折射后射出来的位置都不同,实现多线的技术效果。相对于现有技术,本发明实施例结构简单,实用性强,通过简单的结构实现三维激光雷达成像。
附图说明
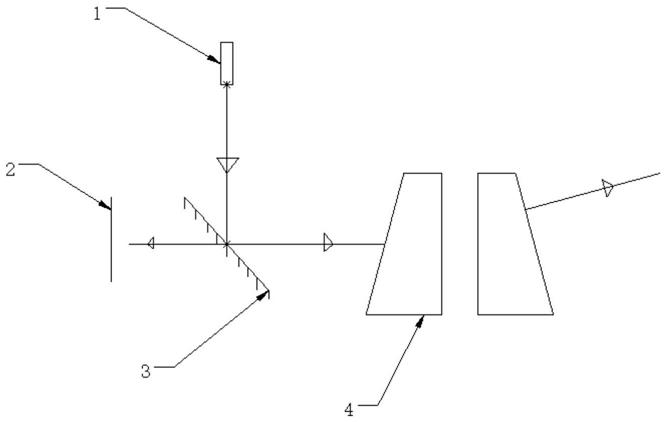
33.图1为本发明基于双光楔的三维激光雷达成像系统的光路示意图;
34.图2、图3为本发明双光楔的转速大小相同,方向不同时形成的图形;
35.图4为本发明基于双光楔的三维激光雷达成像系统形成的点云图形;
36.图5为本发明基于双光楔的三维激光雷达成像方法的流程示意图;
37.图6为本发明反射汇聚读取点云的结构示意;
38.图7为本发明小孔成像的方式读取点云的示意图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.请参阅图1,本发明提供一种基于双光楔的三维激光雷达成像系统,该系统包括沿光轴从左到右依次设置有感光元件2,半透半反镜3和双光楔4,半透半反镜3成倾斜设置,半透半反镜3倾斜面朝向双光楔4,优选地,半透半反镜3倾斜与竖直方向成45度角,半透半反镜3竖直方向上设置有激光光源1,激光光源不间断地发射激光脉冲,从而使得激光光源1发射的激光脉冲竖直照射到半透半反镜3的倾斜面上,激光脉冲经半透半反镜3反射后沿水平方向传输。
41.在本发明实施例中,双光楔4包括第一光楔和第二光楔,第一光楔和第二光楔分别连接到转动装置,通过转动装置控制第一光楔和第二光楔绕其光楔轴线旋转。进一步地,当水平方向传输的激光脉冲沿着双光楔4的光轴垂直射入时,水平方向传输的激光脉冲经过双光楔发生折射,激光脉冲经过双光楔发生折射后以一定的折射角投射到外界,从而使得激光经过双光楔折射后出射角度位置发生改变,进而实现了三维激光雷达对外界进行多维度扫描。
42.在本发明的另一实施例中,三维激光雷达包括补偿镜筒,双光楔4安装于补偿镜筒内部,第一光楔和第二光楔通过两个补偿镜筒实现组合安装,具体的,第一光楔、第二光楔分别包括上表面和下表面,靠近第一光楔和第二光楔的楔角的上表面为外环,远离第一光楔、第二光楔的楔角的下表面为内环,双光楔4安装于补偿镜筒内部,优选地,由于补偿镜筒质量分布不均匀,靠近内环部分的补偿镜筒质量高于靠近外环部分的补偿镜筒质量,为了维持双光楔转动惯量的稳定,本发明增加双光楔4外环质量,根据外环和内环的质量差、以及补偿镜筒来控制双光楔4的转动惯量。
43.如图1所示,第一光楔和第二光楔的外圆尺寸相同,两块楔镜组合后,其中经过半透半反镜3反射后的激光经过第一光楔进入,从第二光楔射出。转动装置包括第一电机和第二电机,第一电机连接第一光楔,第二电机连接第二光楔,第一电机和第二电机可以同向转动,也可以反向转动,带动第一光楔和第二光楔同向或相向运动。优选地,在一些情况下,例如,机械磨损、材料腐蚀等会造成电机的轴承表面不平整,运行时引起异常的振动,进而产生异常的声波信号,因此,本发明还包括一个收集第一电机和第二电机声波信号的接收器,根据接收器接收的声波信号来判断电机状态,接收器可以通过非接触方式接收声波信号,与第一电机和第二电机分开,从而可以避免第一电机和第二电机异常工作产生的异常振动、磁场等对接收器部件造成不好的影响和损害,进一步地,接收器可以为声波传感器,例如麦克风、加速度计、振动传感器、压电晶体和/或气压计等。
44.为了满足三维激光雷达生成点云图像的质量,在本发明另一优选实施例中,三维激光雷达还包括用于检测双光楔旋转速度的编码器闭环以及中央处理器。其中,编码器闭环,中央处理器和转动装置组成闭环控制,编码器闭环连接转动装置,转动装置用于转动双光楔4,编码器闭环用于检测双光楔4的转速值,并将检测的双光楔4的转速值传输给中央处理器,中央处理器根据接收的双光楔4的转速值产生控制信号,通过控制信号控制转动装置的第一电机和第二电机转动,进而控制第一光楔和第二光楔的旋转速度,其中,第一光楔以第一转速旋转,第二光楔以第二转速旋转,当第一转速的大小或者方向不同于第二转速的大小或方向时,通过第二光楔射出的激光脉冲会产生不同的偏转角θ。
45.当第一光楔和第二光楔的楔角相同时,在本发明另一优选实施例中,第一光楔和第二光楔进行同向或反向旋转时,激光脉冲经过双光楔后偏转角θ变化量较大,且生成的点云图形截然不同,如图2和图3所示的图形,其中图2为当第一转速和第二转速的大小相同,方向相同时获取的图形,图3为当第一转速和第二转速的大小相同,方向不同时获取的图形。具体地,可通过编码器闭环和中央处理器相结合进行pid(p,比例;i,积分;d,微分)调节,进而控制第一光楔和第二光楔转速以及旋转方向。
46.进一步地,中央处理器根据转速值向转动装置发送控制指令控制第一光楔和第二光楔的旋转速度的方式具体为,中央处理器对转速值进行解析;判断转速值是否为第一光楔的转速值或第二光楔的转速值;当判定转速值为第一光楔的转速值时,向转动装置发送第一转速控制指令;当判定转速值为第二光楔的转速值时,向转动装置发送第二转速控制指令,从而实现了中央处理器输出控制信号控制转动装置带动双光楔4转动,精准的控制第一光楔和第二光楔的相对转速。当第一转速和第二转速的大小相同,方向相同以及不同时,形成如图2和图3所示的图形。
47.上述图形随着双光楔4的旋转而感光元件不断接收回波信号,当回波信号随着时间累加所叠加时,经过中央处理器处理后可得到中间较密集两端较稀疏的点云图形,请参考图4所示。
48.本发明另一优选实施例中,激光脉冲可通过旋转双光楔进行折射从而形成特殊的轨迹,进而达到三维多线雷达的扫描效果。为获得更加密集的点云图,往往需要更高的转速。而在高转速下其转动惯量需要尽量保持平衡,本发明通过增加双光楔4外环附件补偿镜筒的质量,从而控制双光楔转动惯量。具体地,可根据计算双光楔的外环和内环的质量差、以及补偿镜筒来控制双光楔4的转动惯量。例如可通过计算第一光楔的外环和内环的第一质量差,计算第二光楔的外环和内环的第二质量差,根据第一质量差增加靠近第一光楔的外环部分的补偿镜筒的质量,根据第二质量差增加靠近第二光楔的外环部分的补偿镜筒的质量。
49.本发明还提供一种基于双光楔的三维激光雷达成像方法,采用上述各实施例的基于双光楔的三维激光雷达成像系统,请参考图5所示,方法包括如下步骤:
50.步骤s10,转动装置驱动第一光楔和第二光楔同向运动或相向运动。
51.在本发明实施例中,转动装置分别连接第一光楔和第二光楔,驱动第一光楔和第二光楔绕其轴线旋转。优选的,转动装置包括第一电机和第二电机,第一电机连接第一光楔,第二电机连接第二光楔,第一电机和第二电机可以同向转动,也可以反向转动,进而带动第一光楔和第二光楔同向或相向运动。
52.步骤s20,通过转动装置和编码器闭环控制第一光楔,第二光楔的转速。
53.在本发明实施例中,编码器闭环连接转动装置和中央处理器,组成闭环控制系统,编码器闭环将检测的双光楔的转速值传输给中央处理器,中央处理器根据接收的双光楔的转速值产生控制信号,通过控制信号控制转动装置转动。具体的,中央处理器输出控制信号控制第一电机以第一转速转动,控制第二电机以第二转速转动,当第一转速的大小或者方向不同于第二转速的大小或方向时,通过第二光楔射出的激光会产生不同的偏转角θ,呈现出不同的图形。
54.步骤s30,激光光源发射的激光脉冲沿双光楔的光轴进入双光楔,经过双光楔折射后投射到外界。
55.在本发明实施例中,双光楔包括第一光楔和第二光楔,激光光源发射的激光脉冲竖直照射到半透半反镜的镜面上,经反射脉冲后激光水平射出并沿着双光楔的光轴进入双光楔,经双光楔折射后,沿着一定的角度投射到外界。具体地,当激光脉冲经第一光楔折射后产生的光斑大致可看作一圆形,此圆形光斑打在第二光楔的竖直平面上,经由第二光楔折射后沿一定的角度射出。
56.在本发明另一实施例中,当第一光楔和第二光楔处于静止时,第一光楔和第二光楔在本发明中以光轴同轴,平面相对,斜面相背的方式,通过两个补偿镜筒实现组合安装,如图1所示,两块楔镜的外圆尺寸相同,两块楔镜组合后,其中半透半反镜反射后的激光经过一个楔镜的斜面射入楔镜,另一个楔镜的斜面对应激光的出射方向。
57.步骤s40,接收外界物体反射回来的回波信号,并根据回波信号生成点云图像。
58.在本发明实施例中,感光元件接收外界物体反射回来的回波信号,由光信号转换为电信号,并经过模数转换模块,将电信号转换为数字信号,即点云数据,当转化的点云数据随着时间累加所叠加时,即可得到中间较密集两端较稀疏的点云图形。
59.在本发明实施例中,接收外界物体反射回来的回波信号,具体步骤包括,回波信号通过双光楔进入三维激光雷达,回波信号穿过半透半反镜,感光元件接收回波信号。进一步地,为了提高三维激光雷达接收回波信号数据的可靠性,本发明还提供了一种点云数据异常值检测方法,具体包括:检测接收到的沿光路的回波信号,基于回波信号探测环境中的物体,获取回波信号中的检测信号的特征,检测信号包括激光脉冲信号经三维激光雷达中的光学元件和/或三维激光雷达的检测盲区内的物体所反射的光信号,比较检测信号的特征与检测信号的预设特征,根据比较结果检测三维激光雷达的异常,从而为三维激光雷达提供有效的预警机制,避免出现性能恶化甚至功能缺失。
60.在本发明另一优选实施例中,本发明为获得更加密集的点云图,往往需要更高的转速,而在高转速下其转动惯量需要尽量保持平衡,可通过增加双光楔外环质量,根据外环和内环的质量差、以及补偿镜筒控制双光楔转动惯量。具体方法为:计算第一光楔的外环和内环的第一质量差;计算第二光楔的外环和内环的第二质量差;根据第一质量差增加靠近第一光楔的外环部分的补偿镜筒的质量;根据第二质量差增加靠近第二光楔的外环部分的补偿镜筒的质量。
61.在本发明的其中一实施例中,本发明通过三维激光雷达所形成的点云图形可通过三维雷达点云读取方式进行读取,通过反射汇聚读取点云,具体请参考图1所示,激光经半透半反镜3折射后,光线照射到物体表面产生漫反射,此时有一部分光线反射进入双光楔4,
根据光路的可逆性,该光束将会经过折射最后沿原光路返回。部分光将会折射到感光元件2上进而对脉冲光线进行解密可得到光的飞行时间,从而计算得到光程d,由图6可知d、l、r(d为光线实际飞行距离;l为测距装备到水平面上的距离;r为中心点到反射点的距离)三者可在空间中构建为一直角三角形,根据公式可求处l与r的比值则可求出d与l的夹角,即在直角三角型中已知斜边和其相邻的夹角,此时d已知可计算l与r。
62.在本发明的另一实施例中,请参考图7所示,还可采用小孔成像的方式读取点云,在设备发射面开一个小孔5,激光雷达1发射的激光脉冲竖直射入半透半反镜3的镜面,经反射后激光水平射出并沿着双光楔4的光轴射入双光楔4发生折射,经双光楔4射出的激光在物体表面发生漫反射时将会有光线穿过小孔5成像在感光元件2上。感光元件2上的像将会随着距离的远近而发生变化,可进行前期标定确定其像与实物的比值,当比值确定时可根据像计算得出该点的r值,进而计算出该点的x、y、z三维坐标。
63.本发明包括旋转双光楔,采用光的折射原理,当两个光楔以不同的转速或方向旋转时,光线将会产生不同的偏转角,进而使折射光线以二维的运动轨迹延一定角度射出,当其照射到物体表面时即可得到反射光线,从而根据其射出的角度可计算该反射点的x、y、z三维坐标。
64.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

