1.本发明涉及电子技术领域,具体涉及一种三相交流电子负载的预测控制方法。
背景技术:
2.由于各种交流电源设备,比如不间断电源(简称ups)、电池、交直流电源、车载电源、通信电源、变频电源等,在投入实际应用前都要进行非常严格的检测实验,包括老化实验、动静态测试、产品的输出特性测试等。但是,使用传统负载进行测试会造成调节不便、精度差、稳定性差、极大的能源浪费等问题。为了解决以上问题,一般都采用能馈型电子负载。如图1所示,三相半桥三相交流电子负载的拓扑结构为两个背靠背的pwm整流器,前级pwm整流器为负载模拟侧,其中包括由vt1
‑
vt6组成的三相igbt桥、滤波电感l1以及等效电阻r1,根据pwm整流器的四象限工作特性来实现对不同性质的负载的模拟;后级pwm整流器为能量回馈侧,其中包括由vt7
‑
vt12组成的三相igbt桥、滤波电感l2以及等效电阻r2,根据pwm整流器的单位功率因数并网特性,将测试过程产生的能量回馈给电网;中间用直流母线电容连接,用于控制器的解耦和抑制直流侧的电压谐波,实现两级之间的能量的传输。因此负载模拟侧的控制目标是控制输入电流追踪设定值,从而实现对各种特性负载的模拟,因此负载模拟侧采取直接电流控制。能量回馈侧的控制目标包括控制直流母线电压的恒定以及后级单位功率因数并网,因此采取功率控制,在稳定直流母线电压的同时控制输入无功功率来实现控制目的。
3.从上可以看出负载模拟侧和能量回馈侧中的电流环的设计会在一定程度上影响电子负载模拟负载的响应速度以及准确度,并且前后级控制器需要进行解耦。传统的电流的控制策略有pi控制器、滞环控制器、谐振控制器和pi 重复控制等。但传统的pi控制带宽有限,跟踪精度不高;采用滞环控制器时控制系统频率带宽对其控制策略产生影响,使得其跟踪性能受到影响;传统的pi 重复控制虽可以一定程度上抑制谐波,但pi 重复控制器因重复控制固有的延时环节z
‑
n,使得其响应速度具有一个周期的延时。
4.针对上段陈述的技术问题,现有技术,申请号为202011095231,发明名称为:三相交流电子负载的重复控制方法,采用重复控制器,将内模换成偶次谐波内模和奇次谐波内模并联。双模重复控制中含有奇次谐波和偶次谐波的内模,且在形同的重复控制增益下对于偶次谐波的增益和奇次谐波的增益是传统重复控制的两倍。由于双模控制中奇次谐波和偶次谐波内模的控制器增益是分开控制的,这就意味着可实现对于奇次谐波以及偶次谐波的分别控制。但是存在的问题是:重复控制对系统参数变化非常敏感,并且其动态性能较差,控制算法也比较复杂。
技术实现要素:
5.1.所要解决的技术问题:
6.针对上述技术问题,本发明提供一种能提高控制的响应速度、控制策略简单并且不需要前后级控制器解耦的三相交流电子负载的预测控制方法。本控制方法应用于交流电
子负载的控制算法大都比较复杂,预测控制控制算法简单,且具有较好的动态性能,在更简单的控制器下可以获得较为理想的控制效果。
7.2.技术方案:
8.一种三相交流电子负载的预测控制方法,所述三相交流电子负载为包括具有第一pwm整流器的前级的负载模拟器和具有第二pwm整流器的后级的能量回馈器;所述负载模拟器的第一pwm整流器与能量回馈器的第二pwm整流器中间通过直流母线电容背靠背相连;其特征在于:所述的第一pwm整流器和所述的第二pwm整流器采用各自独立的控制方法;其中第一pwm整流器控制方法包括以下步骤:
9.步骤1:三相交流电子负载与待测试的电源相连,采样待测试的电源电压u和输入电流i。
10.步骤2:通过abc/αβ转换模块将测试的电源电压u与输入电流i转换得到α
‑
β坐标系下的负载模拟侧实际电源电压u
α
、u
β
和负载模拟侧实际输入电流i
α
、i
β
;根据用户预设的负载特性,利用欧姆定律的复数形式计算得出在α
‑
β坐标系下的负载模拟侧期望输入电流和所述负载特性包括电阻性负载、阻感性负载和阻容性负载。
11.步骤3:基于pwm整流器的数学模型预测第一pwm整流器中八个电压矢量中的每个不同电压矢量在下一个采样间隔中的负载电流值;所述采样间隔为预设的采样间隔。
12.步骤4:将步骤2中生成的期望输入电流i
αref
和i
βref
,与步骤3中预测的下一个采样间隔中的八个负载电流依次带入第一成本函数计算参考电流与预测电流之间的误差,取使误差最小的电压矢量对应的开关状态作为下一采样间隔第一pwm整流器的开关状态。
13.第二pwm整流器控制方法包括以下步骤:
14.步骤5:将三相交流电子负载并入电网,采样电网电压u
s
和并网电流i
s
。
15.步骤6:将采样的电网电压u
s
和并网电流i
s
通过abc/αβ转换模块转换为α
‑
β坐标系下的电网侧实际电源电压u
sα
、u
sβ
和电网侧实际输入电流i
sα
、i
sβ
。
16.步骤7:采集直流母线的电压,并将采样的直流母线电压的实际值u
dc
与预设的直流母线电压期望值之间的误差信号输入pi控制器;所述pi控制器输出的信号与直流母线电压的实际值u
dc
相乘即得到有功功率期望值p
ref
;将无功功率期望值q
ref
设置为0。
17.步骤8:基于pwm整流器的数学模型预测第二pwm整流器中八个电压矢量中的每个不同电压矢量在下一个采样间隔中的并网电流值。
18.步骤9:将步骤6中电网侧实际电源电压u
sα
、u
sβ
,与步骤8中预测的并网电流值依次带入功率公式计算出预测的有功功率与无功功率;并将预测的有功功率与无功功率、有功功率期望值p
ref
与无功功率期望值q
ref
带入第二成本函数计算出预测功率与及其对应的期望功率的差值;取使成本函数最小的电压矢量对应的开关状态作为下一采样间隔第二pwm整流器的开关状态。
19.进一步地,步骤4中的第一成本函数具体为:
20.(1)式中,为预测的下一个采样间隔的电流大小。
21.进一步地,步骤9中的第二成本函数具体为:g2=|p
ref
‑
p
k 1
| |q
ref
‑
q
k 1
|;
ꢀꢀꢀꢀ
(2)
22.(2)式中,p
k 1
、q
k 1
为预测的下一个采样间隔的有功功率与无功功率大小。
23.进一步地,所述第一pwm整流器与第二pwm整流器的开关状态均为:s=[000 001 010 011 100 101 110 111]。
[0024]
3.有益效果:
[0025]
(1)本发明的控制算法简单。预测控制不需要特别精确的数学模型,根据现有的动态模型进行分析预测,就可以得到理想的控制效果,具有很好的克服系统不确定的能力。
[0026]
(2)本控制方法动态性能良好。预测控制本身就具有反馈校正的过程,使得它具有很强的抗干扰性。
[0027]
(3)本控制方法精度高。预测控制的优化过程不是一次性完成的,是在每一时刻反复进行。
[0028]
(4)本控制方法高频性能好。预测控制在高频环境下会大大改善系统的暂态性能,使得系统的暂态过程更稳定。
附图说明
[0029]
图1为本发明中的三相交流电子负载的主电路拓扑图;
[0030]
图2为本发明中采用的预测控制算法的框图;
[0031]
图3为本发明的预测控制方框图。
具体实施方式
[0032]
下面结合附图对本发明进行具体的说明。
[0033]
如附图2至附图3所示,一种三相交流电子负载的预测控制方法,所述三相交流电子负载为包括具有第一pwm整流器的前级的负载模拟器和具有第二pwm整流器的后级的能量回馈器;所述负载模拟器的第一pwm整流器与能量回馈器的第二pwm整流器中间通过直流母线电容背靠背相连;其特征在于:所述的第一pwm整流器和所述的第二pwm整流器采用各自独立的控制方法;其中第一pwm整流器控制方法包括以下步骤:
[0034]
步骤1:三相交流电子负载与待测试的电源相连,采样待测试的电源电压u和输入电流i。
[0035]
步骤2:通过abc/αβ转换模块将测试的电源电压u与输入电流i转换得到α
‑
β坐标系下的负载模拟侧实际电源电压u
α
、u
β
和负载模拟侧实际输入电流i
α
、i
β
;根据用户预设的负载特性,利用欧姆定律的复数形式计算得出在α
‑
β坐标系下的负载模拟侧期望输入电流和所述负载特性包括电阻性负载、阻感性负载和阻容性负载。
[0036]
步骤3:基于pwm整流器的数学模型预测第一pwm整流器中八个电压矢量中的每个不同电压矢量在下一个采样间隔中的负载电流值;所述采样间隔为预设的采样间隔。
[0037]
步骤4:将步骤2中生成的期望输入电流i
αref
和i
βref
,与步骤3中预测的下一个采样间隔中的八个负载电流依次带入第一成本函数计算参考电流与预测电流之间的误差,取使误差最小的电压矢量对应的开关状态作为下一采样间隔第一pwm整流器的开关状态。
[0038]
第二pwm整流器控制方法包括以下步骤:
[0039]
步骤5:将三相交流电子负载并入电网,采样电网电压u
s
和并网电流i
s
。
[0040]
步骤6:将采样的电网电压u
s
和并网电流i
s
通过abc/αβ转换模块转换为α
‑
β坐标系下的电网侧实际电源电压u
sα
、u
sβ
和电网侧实际输入电流i
sα
、i
sβ
。
[0041]
步骤7:采集直流母线的电压,并将采样的直流母线电压的实际值u
dc
与预设的直流母线电压期望值之间的误差信号输入pi控制器;所述pi控制器输出的信号与直流母线电压的实际值u
dc
相乘即得到有功功率期望值p
ref
;将无功功率期望值q
ref
设置为0。
[0042]
步骤8:基于pwm整流器的数学模型预测第二pwm整流器中八个电压矢量中的每个不同电压矢量在下一个采样间隔中的并网电流值。
[0043]
步骤9:将步骤6中电网侧实际电源电压u
sα
、u
sβ
,与步骤8中预测的并网电流值依次带入功率公式计算出预测的有功功率与无功功率;并将预测的有功功率与无功功率、有功功率期望值p
ref
与无功功率期望值q
ref
带入第二成本函数计算出预测功率与及其对应的期望功率的差值;取使成本函数最小的电压矢量对应的开关状态作为下一采样间隔第二pwm整流器的开关状态。
[0044]
进一步地,步骤4中的第一成本函数具体为:
[0045]
(1)式中,为预测的下一个采样间隔的电流大小。
[0046]
进一步地,步骤9中的第二成本函数具体为:g2=|p
ref
‑
p
k 1
| |q
ref
‑
q
k 1
|;
ꢀꢀꢀꢀ
(2)
[0047]
(2)式中,p
k 1
、q
k 1
为预测的下一个采样间隔的有功功率与无功功率大小。
[0048]
进一步地,所述第一pwm整流器与第二pwm整流器的开关状态均为:s=[000 001 010 011 100 101 110 111]。
[0049]
具体实施例:
[0050]
如附图1所示,三相半桥三相交流电子负载的拓扑结构为两个背靠背的pwm整流器,前级pwm整流器为负载模拟侧,其中包括由vt1
‑
vt6组成的三相igbt桥、滤波电感l1以及等效电阻r1,根据pwm整流器的四象限工作特性来实现对不同性质的负载的模拟;后级pwm整流器为能量回馈侧,其中包括由vt7
‑
vt12组成的三相igbt桥、滤波电感l2以及等效电阻r2,根据pwm整流器的单位功率因数并网特性,将测试过程产生的能量回馈给电网;中间用直流母线电容连接,用于控制器的解耦和抑制直流侧的电压谐波。负载模拟侧的控制目标是控制输入电流追踪设定值,从而实现对各种特性负载的模拟,因此负载模拟侧采取直接电流控制。能量回馈侧的控制目标包括控制直流母线电压的恒定以及后级单位功率因数并网,因此采取功率控制,在稳定直流母线电压的同时控制输入无功功率来实现控制目的。负载模拟侧控制器通过电压采样电路获取测试电源的电压信号和相位信息,输入到指令信号产生单元,指令信号产生单元根据设定负载形式,由相应的指令信号产生算法计算生成指令电流信号,而负载模拟器通过电流控制策略跟踪指令电流的变化,从而模拟各种特性的负载功能。能量回馈侧控制器通过预测控制和直接功率控制相结合的控制策略,分别控制直流母线电压和并网电流,实现功率因数接近于
‑
1的能量回馈,最终将能量回馈到电网。
[0051]
如附图2所示为本发明提供的预测控制算法的框图;在对负载模拟侧通过当前时刻的电流值i(k)输入预测模块预测出下一时刻的电流值i(k 1),并将预测的电流值与预设的期望值带入成本函数计算参考电流与预测电流之间的误差,取误差最小值对应的开关量(s1、s2、s3)进行控制第一pwm整流器。在能量回馈侧,将预测的功率与期望的功率时带入成
本函数计算出预测功率与期望功率的差值,取使成本函数最小的电压矢量对应的开关状态(s1、s2、s3)作为下一阶段第二pwm整流器的开关状态。
[0052]
如附图3所示,
[0053]
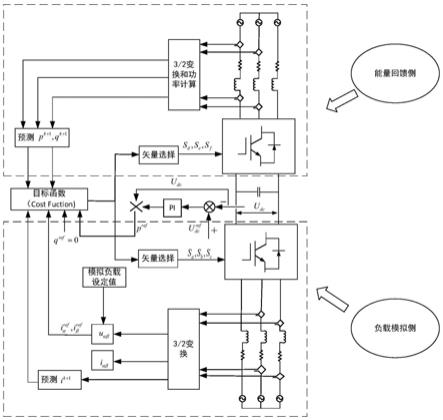
负载模拟侧采集实际输入电流基于pwm整流器的数学模型从而预测得到下一采样间隔的输入电流,将预测的负载模拟侧输入电流与负载模拟侧期望输入电流在成本函数中进行比较,选取最优解对应的开关状态作为第一三相pwm整流器的控制信号;将能量回馈侧的实际直流母线电压与能量回馈侧期望直流母线电压的偏差值进行pi积分作用后得到期望并网电流值,设计期望有功功率和无功功率,再令其与预测的下一采样间隔的有功功率和无功功率在成本函数中进行比较,选取最优解对应的开关状态作为第二三相pwm整流器的控制信号。
[0054]
本发明所提的设计中,系统参数可以设置为:负载模拟侧和能量回馈侧滤波电感为10mh,线路等效电阻为0.3ω,直流母线电容为3000uf,直流母线电压期望值为600v,采样频率为20khz。
[0055]
虽然本发明已以较佳实施例公开如上,但它们并不是用来限定本发明的,任何熟习此技艺者,在不脱离本发明之精神和范围内,自当可作各种变化或润饰,因此本发明的保护范围应当以本技术的权利要求保护范围所界定的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

