1.本发明涉及摄像测量技术领域,具体涉及一种通过布置近场不动点的摄像测量误差抑制方法。
背景技术:
2.随着计算机视觉和图像传感器等技术的发展和进步,具有非接触、远距离、精度高等特点的摄像测量方法逐渐成为结构健康监测领域的研究热点之一。通常由于外界环境、测量仪器等因素会使结构位移的测量结果产生较大的误差。为了抑制测量误差对测量精度的影响,一些人采用在待测结构附近布置不动参考点或者以远处的建筑群为不动参考点的方法。这种方法比建立单一因素与测量误差的相关模型来达到抑制效果的方法,考虑了多因素耦合情况下的误差,更加全面。但是,这种办法对于一些情况,例如测量大跨的桥梁跨中挠度,高楼的顶点位移,由于环境和视场原因我们难以在结构附近布置或者寻找不动参考点。因此,我们需要一种方便寻找不动参考点,且适应视场及环境要求的抑制摄像测量误差的新型方法。
3.例如,一种在中国专利文献上公开的“基于不动点的远距离面内小位移绝对检测装置及方法”,其公告号cn106482648a,包括第一标志牌、第二标志牌、摄像机,通过摄像机采集标志牌的投影进行检测移动,这对于参考点的布置有极大要求,限制了被测结构范围,泛用性低,且不能自动调节测量参数,精确度较低,测量误差较大。
技术实现要素:
4.为此,本发明提供一种通过布置近场不动点的摄像测量误差抑制方法,能够方便的布置不动参考点,抑制多因素耦合下测量误差,满足远距离测量结构且灵活适应测量环境的要求。
5.为了实现上述目的,本发明提供如下技术方案:一种通过布置近场不动点的摄像测量误差抑制方法,包括以下步骤:(1)在待测结构上安装远场结构标志,选取静止场地架设数字摄像机,并在所述数字摄像机与所述待测结构之间设置静止标记物,所述静止标记物上设有近场参考标志;(2)调节数字摄像机参数,使得其同时监测远场结构标志与近场参考标志,并使远场结构标志清晰成像,近场参考标志由于不在景深范围内而无法清晰成像,呈现弥散圆状态;(3)建立摄像机坐标系、图像坐标系及世界坐标系,标定数字摄像机,获取标定参数,对每帧图像运用图像增强算法进行预处理,消除白噪声和冗余信息;(4)获取初始帧图像,采用特征检测算法获取每帧图像中近场参考标志和远场结构标志的像素坐标;(5)获取第二帧图像,将该帧图像内近场参考标志和远场结构标志的像素坐标分别减去初始帧内两者的像素坐标,得到两者在像素坐标系内的位移变化量;
(6)对后续的图像序列重复步骤(5)处理,即可得到测量过程中近场参考标志和远场结构标志的像素位移值,由于近场参考标志处于静止状态,其位移即为摄像测量误差;(7)利用近场参考标志的测量误差与远场结构标志的测量误差相关,而与远场结构标志的真实位移不相关这一特性,以近场参考标志的像素位移为参考信号,以远场结构标志的像素位移为基本信号,设计自适应滤波器,得到消除测量误差后的远场结构标志的像素位移;(8)根据标定参数将消除测量误差后的远场结构标志的像素位移转换为世界位移,即可得到待测结构的真实位移。
6.作为优选,步骤(1)中,所述静止标记物位于所述数字摄像机与所述待测结构之间靠近所述数字摄像机处,在数字摄像机附近布置静止标志物,作为参考,操作简单。
7.作为优选,步骤(2)中,调节数字摄像机参数,使得其同时监测远场结构标志与近场参考标志,并使远场结构标志清晰成像,近场参考标志由于不在景深范围内而无法清晰成像,呈现弥散圆状态,此时远场结构标志与近场参考标志位于同一图像上。
8.作为优选,步骤(3)中,对每帧图像运用图像增强算法进行预处理,首先包括图像剪切,提取感兴趣区域,去除无效区域;其次针对由近场参考标志形成的弥散圆,进行形态学处理,去除图像背景中的复杂边缘信息,保持弥散圆边缘信息不破坏,之后进行中值滤波与二值化处理,保留弥散圆轮廓。
9.作为优选,步骤(6)中,对于接下来的每一帧图像,重复步骤(5),得到测量过程中近场参考标志和远场结构标志的像素位移值。
10.作为优选,步骤(7)中,分析近场参考标志位移与远场结构标志的位移,发现近场参考标志位移所代表的测量误差与远场结构标志测量误差相关,而与远场结构标志真实位移无关,根据这一特性,符合自适应滤波的要求,所以以近场参考标志的像素位移为参考信号,以远场结构标志的像素位移为基本信号,设计自适应滤波器。
11.本发明的实施方式具有如下优点:(1)近场不动参考点易于布置,克服了不便寻找远场不动参考点的问题,对被测结构要求低,泛用性强;(2)利用远点误差和近点误差存在相关性的特点进行精度补偿,提高了测量准确度,误差小;(3)使用自动滤波原理,使得能够自动调节参数适应由测距带来的误差变化,从而达到使测得位移更加精确的目的,精确度高。
附图说明
12.为了更清楚地说明发明或现有技术中的技术方案,下面将对本发明或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
13.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达到的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
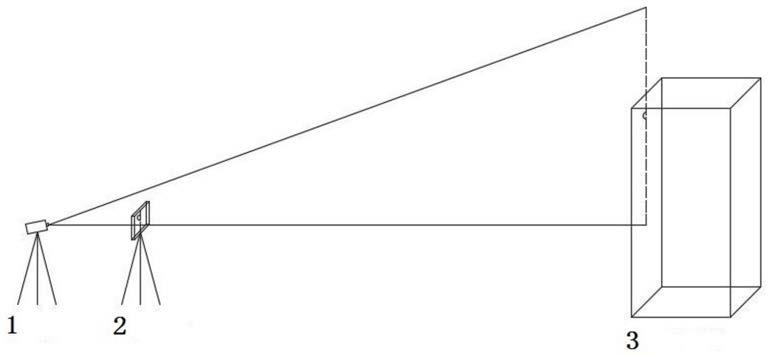
14.图1是本发明的工作场景示意图。
15.图2是图1的原理示意图。
16.图3是本发明的成像示意图。
17.图4是本发明的滤波器逻辑示意图。
18.图中:1
‑
数字摄像机;2
‑
静止标志物;3
‑
待测结构;4
‑
近场参考标志;5
‑
前景深;6
‑
后景深;7
‑
景深;8
‑
自适应滤波器;9
‑
基本信号;10
‑
参考信号;11
‑
系统输出;12
‑
远场结构标志。
具体实施方式
19.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的认识可由本说明书所揭露的内容轻易地了解本发明的其它优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
20.如图 1
‑
4所示,本发明提供了通过近场布置不动参考点的摄像测量误差抑制方法,包括以下步骤:(1)在待测结构3上安装远场结构标志12,选取静止场地架设数字摄像机1,并在数字摄像机1与待测结构3之间靠近数字摄像机1处布置静止标志物2,静止标志物2上设有近场参考标志4,如图1所示;(2)调节数字摄像机1参数,使得其同时监测远场结构标志12与近场参考标志4,并使远场结构标志12清晰成像,近场参考标志4由于不在景深7范围内而无法清晰成像,呈现弥散圆状态,如图3所示;(3)建立摄像机坐标系、图像坐标系及世界坐标系,标定数字摄像机1,获取标定参数。对每帧图像运用图像增强算法进行预处理,消除白噪声和冗余信息;在数字摄像机1安装好后,在数字摄像机1前方摆放静止标志物2。用数字摄像机1对准远场结构标志12进行摄像测量,处理所摄远场结构标志12图像并确定各标定点的像平面坐标,把图像上的像平面坐标和远场结构标志12上物平面坐标一一对应,形成系统标定,获取标定参数,从而得到两坐标间的映射关系;对每帧图像进行预处理,首先包括图像剪切,提取感兴趣区域,去除无效区域;其次针对由近场参考标志形成的弥散圆,进行形态学处理,去除图像背景中的复杂边缘信息,保持弥散圆边缘信息不破坏;之后进行中值滤波与二值化处理,保留弥散圆轮廓;获取初始帧图像,采用特征检测算法获取每帧图像中近场参考标志和远场结构标志的像素坐标;特征检测算法以基于梯度的hough变换圆算法为例,首先,计算图像的梯度场,非零梯度向量所在位置亦对应图像边缘,接着,利用投票过程将梯度场转换为累加阵列,即为非零梯度方向上的像素添加1选票,最后,求出累加阵列中局部峰值所在的位置,即对应为圆心坐标;(5)获取第二帧图像,将该帧图像内近场参考标志4和远场结构标志12的像素坐标分别减去初始帧内两者的像素坐标,得到两者在像素坐标系内的位移变化量;(6)对后续的图像序列重复步骤(5)处理,即可得到测量过程中近场参考标志4和远场结构标志12的像素位移值,由于近场参考标志4处于静止状态,其位移即为摄像测量误
差;(7)利用近场参考标志4的测量误差与远场结构标志12的测量误差相关,而与远场结构标志12的真实位移不相关这一特性,以近场参考标志4的像素位移为参考信号,以远场结构标志12的像素位移为基本信号,设计自适应滤波器8,如图4所示,得到消除测量误差后的远场结构标志12的像素位移。
21.实验分析,近场参考标志4的测量误差与远场结构标志12的测量误差相关,而与远场结构标志12的真实位移不相关,满足了使用自适应滤波法的前提条件,因此将自适应滤波方法运用到摄像测量精度的优化上来;具体使用时,自适应滤波器8以近场参考标志4的像素坐标为参考信号、以远场结构标志12的像素坐标为基本信号,跟踪它们的统计特性,并自动地调节参数以适应它们未知或随机变化的统计特性,从而实现最优滤波而得到更加精确的位移;根据标定参数将消除测量误差后的远场结构标志12的像素位移转换为世界位移,即可得到待测结构的真实位移。
22.在其它实施例中,步骤(4)可采用其它弥散圆圆心算法。
23.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

