1.本实用新型涉及一种空气环境检测设备,尤其涉及一种可远程控制的智能空气环境检测设备。
背景技术:
2.随着人们的生活水平不但提高,人们对健康也越来越重视,空气环境的质量检测是检测污染气体、光散射原理检测粉尘,空气环境检测近年来在我国得到普遍的应用。
3.目前,传统的空气质量检测装置结构简单,难以精准检测到粉尘,粉尘的吸附能力差,无法远程控制,且吸附了大量的粉尘后,需要将其拆卸后,才能将吸附到粉尘进行清理干净,不但降低了装置的检测工作效率,还增加人们的劳动强度等问题存在。
4.综上所述,需要设计一种吸附粉尘能力强、具有清理功能的可远程控制的智能空气环境检测设备,以解决上述的问题。
技术实现要素:
5.为了克服传统的空气质量检测装置结构简单,难以精准检测到粉尘,粉尘的吸附能力差,无法远程控制的缺点,本实用新型的技术问题为:提供一种吸附粉尘能力强、具有清理功能的可远程控制的智能空气环境检测设备。
6.技术方案如下:一种可远程控制的智能空气环境检测设备,包括有壳体、双轴减速电机、wifi模块、检测组件、活动组件和清理组件,壳体内部后下侧设有双轴减速电机,壳体前侧设有wifi模块,壳体内部上侧设有检测组件,壳体内部左右两侧设有活动组件,活动组件与双轴减速电机的输出轴连接,活动组件上设有清理组件;检测组件包括有风扇、玻璃和粉尘传感器,壳体内部上侧转动式设有风扇,壳体内部后上侧设有玻璃,壳体内部后上侧设有粉尘传感器,粉尘传感器位于玻璃后侧。
7.可选地,活动组件包括有导向杆、第一弹簧、滑块、绕线轮、导向轮和拉绳,壳体内部左右两侧均对称设有导向杆,导向杆之间均滑动式设有滑块,滑块与壳体之间均对称设有第一弹簧,第一弹簧均套在导向杆上,双轴减速电机的输出轴上均设有绕线轮,壳体内部下侧左右对称转动式设有导向轮,绕线轮与滑块之间均设有拉绳,拉绳均绕在绕线轮和导向轮上。
8.可选地,清理组件包括有安装框、转轴、滚刷、齿轮、固定杆、导轨和齿条,滑块后侧之间滑动式设有安装框,安装框左右两侧转动式设有转轴,转轴上设有滚刷,滚刷位于安装框内侧,转轴右侧设有齿轮,安装框上部左右两侧设有固定杆,壳体内部后侧左右对称设有导轨,导轨均与固定杆滑动式连接,壳体内部右后侧设有齿条,齿条与齿轮间歇性啮合。
9.可选地,还包括有除尘组件,除尘组件包括有防静电座、静电吸附杆和静电发生器,安装框内侧左右对称设有防静电座,防静电座内侧之间设有静电吸附杆,安装框内部后侧中间设有静电发生器,静电发生器与静电吸附杆连接。
10.可选地,还包括有刮除组件,刮除组件包括有活动块、把手、第二弹簧、刮块、第三
弹簧和压杆,静电吸附杆上滑动式设有活动块,活动块内侧滑动式设有把手,把手与活动块之间设有第二弹簧,活动块内侧对称滑动式设有刮块,刮块与静电吸附杆滑动式配合,刮块与活动块之间均设有第三弹簧,把手下侧对称设有压杆,压杆与刮块配合。
11.可选地,还包括有电路箱,壳体顶部后侧中间设有电路箱,电路箱内安装有开关电源、电源模块和控制模块,开关电源为整个设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,控制模块与wifi模块通过电性连接,手机app与wifi模块通过无线连接;控制模块上连接有ds1302时钟电路和24c02电路;粉尘传感器与控制模块通过电性连接,双轴减速电机、风扇和静电发生器都与控制模块通过外围电路连接。
12.有益效果是:1、本实用新型通过按下电源总开关,给本设备上电,然后人们打开手机app,手机app发出信号,控制模块接收信号后控制检测组件启动,当有光射入到被检测的粉尘颗粒时,检测组件发出信号,控制模块接收信号后控制检测组件吸附粉尘,手机便可控制操作,有效提高人们的工作效率。
13.2、本实用新型通过齿轮与齿条啮合,滚刷与玻璃接触,在齿条的作用下,带动齿轮、转轴和滚刷旋转,使得滚刷对玻璃上的粉尘进行清扫干净,清理粉尘的效果较好,不需人工清理,有效减轻人们的劳动强度。
14.3、通过粉尘传感器检测到的浓度与控制模块中的额定值对比,粉尘传感器发出信号,控制模块接收信号后控制静电发生器产生静电,静电发生器将静电导入到静电吸附杆上,使得粉尘被吸附在静电吸附杆上,静电吸附杆的吸附粉尘能力较强。
附图说明
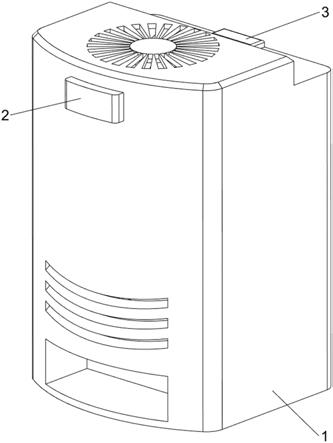
15.图1为本实用新型的立体结构示意图。
16.图2为本实用新型的第一种部分结构示意图。
17.图3为本实用新型的第二种部分结构示意图。
18.图4为本实用新型的第三种部分结构示意图。
19.图5为本实用新型的第四种部分结构示意图。
20.图6为本实用新型的第五种部分结构示意图。
21.图7为本实用新型的电路框图。
22.图8为本实用新型的电路原理图。
23.附图中各零部件的标记如下:1_壳体,101_双轴减速电机,2_wifi模块,3_电路箱,4_检测组件,401_风扇,402_玻璃,403_粉尘传感器,5_活动组件,501_导向杆,502_第一弹簧,503_滑块,504_绕线轮,505_导向轮,506_拉绳,6_清理组件,601_安装框,602_转轴,603_滚刷,604_齿轮,605_固定杆,606_导轨,607_齿条,7_除尘组件,701_防静电座,702_静电吸附杆,703_静电发生器,8_刮除组件,801_活动块,802_把手,803_第二弹簧,804_刮块,805_第三弹簧,806_压杆。
具体实施方式
24.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。仅此声明,本实用新型在文中出现或即将出现的上、下、左、右、前、
后、内、外等方位用词,仅以本实用新型的附图为基准,其并不是对本实用新型的具体限定。
25.实施例1
26.一种可远程控制的智能空气环境检测设备,如图1
‑
图8所示,包括有壳体1、双轴减速电机101、wifi模块2、检测组件4、活动组件5和清理组件6,壳体1内部后下侧设有双轴减速电机101,壳体1前侧设有wifi模块,壳体1内部上侧设有检测组件4,壳体1内部左右两侧设有活动组件5,活动组件5与双轴减速电机101的输出轴连接,活动组件5上设有清理组件6。
27.当需要对空气环境进行检测时,人们按下电源总开关,给本设备上电,然后人们打开手机app,手机app发出信号至wifi模块2和控制模块接收信号后控制检测组件4启动,当有光射入到被检测的粉尘颗粒时,检测组件4发出信号,控制模块接收信号后控制检测组件4吸附粉尘,在检测组件4吸附粉尘后,检测组件4发出信号,控制模块接收信号后控制双轴减速电机101带动活动组件5工作,活动组件5带动清理组件6对检测组件4上的粉尘进行清理干净,当不需使用本设备时,手动将电源总开关,使整个设备断电即可。
28.检测组件4包括有风扇401、玻璃402和粉尘传感器403,壳体1内部上侧转动式设有风扇401,壳体1内部后上侧设有玻璃402,壳体1内部后上侧设有粉尘传感器403,粉尘传感器403位于玻璃402后侧。
29.人们按下电源总开关,给本设备上电,然后人们打开手机app,手机app发出信号,控制模块接收信号后控制风扇401旋转,风扇401将空气中的粉尘卷入到壳体1内,当有光射入到玻璃402上被检测到粉尘颗粒时,粉尘传感器403可对玻璃402上的粉尘的浓度进行检测,当粉尘传感器403检测到的粉尘的浓度大于控制模块中的额定值时,粉尘传感器403发出信号,控制模块接收信号后控制双轴减速电机101的输出轴旋转,对粉尘进行清理,在没有光射入到玻璃402上时,粉尘传感器403检测到的粉尘的浓度小于控制模块中的额定值时,粉尘传感器403发出信号,控制模块接收信号后控制双轴减速电机101停止工作,当人们将手机app关闭后,手机app发出信号,控制模块接收信号后控制风扇401停止旋转,当不需使用本设备时,手动将电源总开关关闭,给本设备断电即可。
30.活动组件5包括有导向杆501、第一弹簧502、滑块503、绕线轮504、导向轮505和拉绳506,壳体1内部左右两侧均对称设有导向杆501,导向杆501之间均滑动式设有滑块503,滑块503与壳体1之间均对称设有第一弹簧502,第一弹簧502均套在导向杆501上,双轴减速电机101的输出轴上均设有绕线轮504,壳体1内部下侧左右对称转动式设有导向轮505,绕线轮504与滑块503之间均设有拉绳506,拉绳506均绕在绕线轮504和导向轮505上。
31.给本设备上电后,当粉尘传感器403发出信号,控制模块接收信号后控制双轴减速电机101的输出轴旋转,从而带动绕线轮504旋转,进而拉动拉绳506,使得导向轮505旋转,在拉绳506的作用下,带动滑块503和清理组件6向下移动,第一弹簧502被压缩,使得清理组件6对玻璃402上的粉尘进行清理干净,当玻璃402上的粉尘清理干净后,粉尘传感器403发出信号,控制模块接收信号后控制双轴减速电机101停止工作,在第一弹簧502的作用下,带动滑块503和清理组件6向上移动复位。
32.清理组件6包括有安装框601、转轴602、滚刷603、齿轮604、固定杆605、导轨606和齿条607,滑块503后侧之间滑动式设有安装框601,安装框601左右两侧转动式设有转轴602,转轴602上设有滚刷603,滚刷603位于安装框601内侧,转轴602右侧设有齿轮604,安装
框601上部左右两侧设有固定杆605,壳体1内部后侧左右对称设有导轨606,导轨606均与固定杆605滑动式连接,壳体1内部右后侧设有齿条607,齿条607与齿轮604间歇性啮合。
33.当滑块503向下移动时,带动安装框601、转轴602、滚刷603、齿轮604和固定杆605向下移动,在导轨606的作用下,使得固定杆605、安装框601、滚刷603和齿轮604向前移动,使得齿轮604与齿条607啮合,滚刷603与玻璃402接触,在齿条607的作用下,带动齿轮604、转轴602和滚刷603旋转,使得滚刷603对玻璃402上的粉尘进行清扫干净,当滑块503向上移动时,带动固定杆605、安装框601、滚刷603和齿轮604向上移动,使得齿轮604脱离齿条607后,不会带动齿轮604、转轴602和滚刷603旋转,在导轨606的作用下,使得安装框601、转轴602、滚刷603、齿轮604和固定杆605向后移动复位。
34.还包括有除尘组件7,除尘组件7包括有防静电座701、静电吸附杆702和静电发生器703,安装框601内侧左右对称设有防静电座701,防静电座701内侧之间设有静电吸附杆702,安装框601内部后侧中间设有静电发生器703,静电发生器703与静电吸附杆702连接。
35.给本设备上电后,当粉尘传感器403检测到的浓度大于控制模块中的额定值时,粉尘传感器403发出信号,控制模块接收信号后控制静电发生器703产生静电,静电发生器703将静电导入到静电吸附杆702上,使得粉尘被吸附在静电吸附杆702上,在防静电座701的作用下,使得产生的静电只在静电吸附杆702上发生,粉尘传感器403检测到的浓度小于控制模块中的额定值时,粉尘传感器403发出信号,控制模块接收信号后控制静电发生器703停止产生静电,使得静电吸附杆702上不会产生静电。
36.还包括有刮除组件8,刮除组件8包括有活动块801、把手802、第二弹簧803、刮块804、第三弹簧805和压杆806,静电吸附杆702上滑动式设有活动块801,活动块801内侧滑动式设有把手802,把手802与活动块801之间设有第二弹簧803,活动块801内侧对称滑动式设有刮块804,刮块804与静电吸附杆702滑动式配合,刮块804与活动块801之间均设有第三弹簧805,把手802下侧对称设有压杆806,压杆806与刮块804配合。
37.当静电吸附杆702上吸附大量粉尘后,人们手动将把手802向下按压,带动压杆806向下移动,第二弹簧803被压缩,在压杆806的作用下,带动刮块804向内移动,第三弹簧805被拉伸,使得刮块804将静电吸附杆702夹紧,然后人们手动将把手802左右移动,带动活动块801、刮块804和压杆806左右移动,使得刮块804将静电吸附杆702上的粉尘刮掉,当静电吸附杆702上的粉尘刮干净后,人们松开把手802,在第二弹簧803的作用下,带动把手802和压杆806向上移动复位,同时在第三弹簧805的作用下,带动刮块804向外移动复位,使得刮块804不再夹紧静电吸附杆702。
38.还包括有电路箱3,壳体1顶部后侧中间设有电路箱3,电路箱3内安装有开关电源、电源模块和控制模块,开关电源为整个设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,控制模块与wifi模块2通过电性连接,手机app与wifi模块2通过无线连接;控制模块上连接有ds1302时钟电路和24c02电路;粉尘传感器403与控制模块通过电性连接,双轴减速电机101、风扇401和静电发生器703都与控制模块通过外围电路连接。
39.虽然已经参照示例性实施例描述了本实用新型,但是应理解本实用新型不限于所公开的示例性实施例。以下权利要求的范围应给予最宽泛的解释,以便涵盖所有的变型以及等同的结构和功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

