一种xy宏微运动平台及其末端反馈方法
技术领域
1.本发明涉及传送装置技术领域,尤其涉及一种xy宏微运动平台及其末端反馈方法。
背景技术:
2.目前,现有的宏微加工设备由多级结构设计与组合而成,对于二维xy宏微运动,由于当前驱动部件、传感器件的安装要求,在xy宏微结构上存在多级串联所造成误差累积的影响,对操作末端的定位精度具有很大的影响;同时,由于xy宏微驱动部件、传感器件在结构上存在交叉排布的耦合问题,当前结构布置,无法实现操作末端的全行程全闭环精密反馈,难以获取末端实际位置的信息,不利于控制方法的实施,影响操作精度。
技术实现要素:
3.本发明的目的在于提出一种xy宏微运动平台,其通过微动单元承载台搭载于通过移动库连接的x向微动单元和y向微动单元,形成微调组件,再通过将微调组件搭载于具有粗定位的宏驱动组件,平台整体在x向运动与y向运动之间进行解耦布置。
4.本发明还提出一种xy宏微运动平台的末端反馈方法,使用了上述的xy宏微运动平台通过在x向运动与y向运动之间进行解耦布置定位。
5.为达此目的,本发明采用以下技术方案:
6.一种xy宏微运动平台,包括:微调组件、宏驱动组件和位置检测装置;
7.所述微调组件包括:x向微动单元、y向微动单元和微动单元承载台;
8.所述x向微动单元和所述y向微动单元具有驱动活动功能;所述x向微动单元的输出端具有载物功能,并连接有所述位置检测装置,用于驱动承载物和所述位置检测装置在x轴方向移动;所述y向微动单元的输出端连接所述x向微动单元,用于驱动所述x向微动单元沿y轴方向移动;
9.所述宏驱动组件包括:x向宏驱动单元、y向宏驱动单元、x向平板和y向平板;
10.所述x向宏驱动单元分别安装于所述x向平板的两端,用于驱动所述x向平板沿y轴方向活动;所述x向平板于两端所述x向宏驱动单元之间可活动地连接所述微动单元承载台,所述x向平板与所述微动单元承载台之间形成沿x轴方向延伸的移动副;
11.所述y向宏驱动单元分别安装于所述y向平板的两端,用于驱动所述y向平板沿x轴方向活动;所述y向平板于两端所述y向宏驱动单元之间可活动地连接所述微动单元承载台,所述y向平板与所述微动单元承载台之间形成沿y轴方向延伸的移动副;
12.所述位置检测装置用于获取自身在x轴和y轴的所在位置。
13.优选地,所述x向微动单元包括:具有移动功能的x向微动块;
14.所述y向微动单元包括:具有移动功能的y向微动块;
15.所述x向微动块连接有所述位置检测装置,所述x向微动块设有x向限位头;所述y向微动块设有第一微动限位槽,所述微动单元承载台设有第二微动限位槽,所述x向限位头
伸入并可活动于所述第一微动限位槽和所述第二微动限位槽内;
16.所述x向微动块与所述y向微动块可活动连接,两者之间形成沿x轴方向延伸的移动副;
17.所述y向微动块与所述微动单元承载台可活动连接,两者之间形成沿y轴方向延伸的移动副。
18.优选地,所述位置检测装置包括:检测接收装置和检测发器装置;
19.所述检测接收装置安装于所述x向微动块;所述检测接收装置活动于所述检测发器装置的表面以内和/或以外;所述检测接收装置活动于所述检测发器装置的表面时,所述检测接收装置获取自身在所述检测发器装置的x轴和y轴的所在位置。
20.优选地,所述x向微动块于所述x向限位头的上端设有承载功能的顶部限位端;所述顶部限位端的底部抵靠于所述y向微动块的上表面;所述y向微动块的底部抵靠于所述微动单元承载台的上表面;
21.所述检测接收装置安装于所述x向限位头的下端。
22.优选地,所述检测接收装置和检测发器装置相向接触,且两者通过相向设置的平面接触。
23.优选地,还包括:工控机;
24.所述工控机与所述位置检测装置通讯连接;所述工控机用于控制所述x向微动单元、y向微动单元、x向宏驱动单元和y向宏驱动单元。
25.一种xy宏微运动平台的末端反馈方法,包括以下步骤:
26.步骤1:由工控机分别对x向宏驱动单元和y向宏驱动单元进行控制,实现x向微动单元的x向和y向的宏动粗定位;
27.步骤2:根据位置检测装置获取的精密位置信息反馈至工控机,当目标位置a’与实际位置a之差的绝对值在精度内,由工控机分别对x向微动单元和y向微动单元进行x向和y向的微动精定位,直至实际位置目标位置a’与实际位置a之差的绝对值在精度内。
28.优选地,所述步骤2中,x向的定位具体包括步骤(3
‑
1):
29.由工控机设定x向宏动目标位置h1至x向宏驱动单元,给定控制输入,使x向宏驱动单元运动;由x向宏驱动单元读数h2;当目标位置h1与实际位置h2之差的绝对值在精度e内,x向宏驱动单元静止不动,启动x向微动单元进行精定位;当目标位置h1与实际位置h2之差的绝对值在精度e外,则继续控制x向宏驱动单元,直至目标位置h1与实际位置h2之差的绝对值在精度e内;
30.当启动x向微动单元,由工控机设定x向微动目标位置w1至x向微驱动单元,由检测接收装置获取x向读数w2,当目标位置w1与实际位置w2之差的绝对值在精度e内,即实现精密定位,控制结束;当目标位置w1与实际位置w2之差的绝对值在精度e外,则继续控制x向微动单元,直至目标位置w1与实际位置w2之差的绝对值在精度e内。
31.优选地,所述步骤2中,y向的定位具体包括步骤(3
‑
2):
32.由工控机设定y向宏动目标位置h3至y向宏驱动单元,给定控制输入,使y向宏驱动单元运动,由y向宏驱动单元读数h4;当目标位置h3与实际位置h4之差的绝对值在精度e1内,y向宏驱动单元静止不动,启动y向微动单元进行精定位;
33.当目标位置h3与实际位置h4之差的绝对值在精度e1外,则继续控制y向宏驱动单
元,直至目标位置h3与实际位置h4之差的绝对值在精度e1内;
34.当启动y向微动单元,由工控机设定y向微动目标位置w1至y向微驱动单元,由平面检测位置获取x向读数w3,当目标位置w3与实际位置w4之差的绝对值在精度e1内,则可实现精密定位;当目标位置w3与实际位置w4之差的绝对值在精度e1外,则继续控制x向微动单元,直至目标位置w3与实际位置w4之差的绝对值在精度e1内。
35.本发明的有益效果:
36.本xy宏微运动平台,采用xy宏微解耦方式,每个轴向上的宏运动部件与微运动部件间设置解耦布置,并在此基础上在x向运动与y向运动之间进行解耦布置,以使整个系统在xy轴向形成共水平面,以及和宏微之间形成解耦设置,结构上各轴运动互不耦合,无需复杂的坐标变换即可获得所在轴上准确位置;同时,xy宏微运动平台在同一水平面上的运动,降低切向干扰与影响,保障其运动的精密度。
附图说明
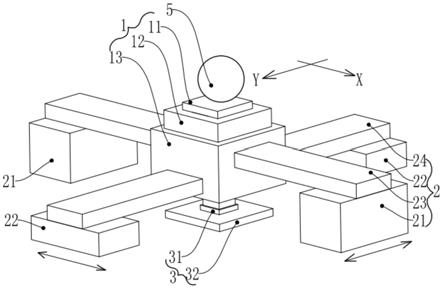
37.图1是xy宏微运动平台的结构示意图;
38.图2是微调组件的结构示意图;
39.图3是xy宏微运动平台控制流程示意图;
40.图4是x向宏微精密定位流程图;
41.图5是y向宏微精密定位流程图;
42.其中:
43.微调组件1、宏驱动组件2、位置检测装置3、工控机4;承载物5;
44.x向微动单元11、y向微动单元12、微动单元承载台13;
45.x向宏驱动单元21、y向宏驱动单元22、x向平板23、y向平板24;
46.x向微动块111、x向限位头112、顶部限位端113;y向微动块121、第一微动限位槽122;第二微动限位槽131;
47.检测接收装置31、检测发器装置32。
具体实施方式
48.下面结合附图通过具体实施方式来进一步说明本发明的技术方案。
49.一种xy宏微运动平台,包括:微调组件1、宏驱动组件2和位置检测装置3;
50.所述微调组件1包括:x向微动单元11、y向微动单元12和微动单元承载台13;
51.所述x向微动单元11和所述y向微动单元12具有驱动活动功能;所述x向微动单元11的输出端具有载物功能,并连接有所述位置检测装置3,用于驱动承载物5和所述位置检测装置3在x轴方向移动;所述y向微动单元12的输出端连接所述x向微动单元11,用于驱动所述x向微动单元11沿y轴方向移动;
52.所述宏驱动组件2包括:x向宏驱动单元21、y向宏驱动单元22、x向平板23和y向平板24;
53.所述x向宏驱动单元21分别安装于所述x向平板23的两端,用于驱动所述x向平板23沿y轴方向活动;所述x向平板23于两端所述x向宏驱动单元21之间可活动地连接所述微动单元承载台13,所述x向平板23与所述微动单元承载台13之间形成沿x轴方向延伸的移动
副;
54.所述y向宏驱动单元22分别安装于所述y向平板24的两端,用于驱动所述y向平板24沿x轴方向活动;所述y向平板24于两端所述y向宏驱动单元22之间可活动地连接所述微动单元承载台13,所述y向平板24与所述微动单元承载台13之间形成沿y轴方向延伸的移动副;
55.所述位置检测装置用于全行程实时在线闭环获取自身在所述x向宏驱动单元、所述x向微动单元、所述y向宏驱动单元和所述y向微动单元共同驱动下的x、y轴二维位置信息。在线闭环是指平台运动的同时获取位置信息,并且将这个时刻的位置信息反馈给工控机或者其他的控制设备,达到更好的控制效果。
56.本xy宏微运动平台,采用xy宏微解耦方式,每个轴向上的宏运动部件与微运动部件间设置解耦布置,并在此基础上在x向运动与y向运动之间进行解耦布置,以使整个系统在xy轴向形成共水平面,以及和宏微之间形成解耦设置,结构上各轴运动互不耦合,无需复杂的坐标变换即可获得所在轴上准确位置;同时,xy宏微运动平台在同一水平面上的运动,降低切向干扰与影响,保障其运动的精密度。
57.具体地,x向宏驱动单元21和y向宏驱动单元22为公知具有驱动活动功能的机构,只需实现x向平板23和y向平板24的活动即可,比如直线电机、滚珠丝杆、气缸、油缸等;
58.移动副是自由度为1的运动副,可以理解成滑块与导轨的配合;例如本方案中,微动单元承载台13可设有平行于x轴的x向轨道132和平行于y轴的y向轨道133,x向轨道132和y向轨道133优选成90度角;x向平板23安装于x向轨道132,y向平板24安装于y向轨道133;在x向轨道132和y向轨道133的导向作用下,x向平板23能沿x轴方向运动,y向平板24能沿y轴方向运动;因此,针对于本方案,当需要调节x向平板23的y方向位置时,启动x向宏驱动单元21;x向宏驱动单元21驱动x向平板23延y轴方向移动,且x向轨道132为x轴向延伸,因此x向平板23能带动微动单元承载台13整体沿y轴方向移动,而微动单元承载台13带有平行于y轴的y向轨道133,因此y向轨道133的y向平板24能为微动单元承载台13的y轴方向移动提供导向作用,提高微动单元承载台13的移动流畅度;此时,可同时启动y向宏驱动单元22,y向宏驱动单元22驱动y向平板24沿x轴移动,进而带动微动单元承载台13沿x轴移动,且通过x向轨道132的x向平板23提供x轴方向的导向作用;上述的x向宏驱动单元21和y向宏驱动单元22共同作用下,微动单元承载台13的位置检测装置3完成粗定位;启动x向微动单元11和y向微动单元12,y向微动单元12带动x向微动单元11移动,进而带动位置检测装置3沿y轴方向移动;x向微动单元11自身带有驱动移动功能,能带动位置检测装置3沿x轴方向移动,实现了位置检测装置3的x和y轴向精准定位。综上,本方案采用xy宏微解耦方式,每个轴向上的宏运动部件与微运动部件间设置解耦布置,并在此基础上在x向运动与y向运动之间进行解耦布置,整个系统具有共水平面xy、宏微之间的解耦设置,在同一水平面上的运动,降低切向干扰与影响,保障精密运动。
59.优选地,所述x向微动单元11包括:具有移动功能的x向微动块111;
60.所述y向微动单元12包括:具有移动功能的y向微动块121;
61.所述x向微动块111连接有所述位置检测装置3,所述x向微动块111设有x向限位头112;所述y向微动块121设有第一微动限位槽122,所述微动单元承载台13设有第二微动限位槽131,所述x向限位头112伸入并可活动于所述第一微动限位槽122和所述第二微动限位
槽131内;
62.所述x向微动块111与所述y向微动块121可活动连接,两者之间形成沿x轴方向延伸的移动副;
63.所述y向微动块121与所述微动单元承载台13可活动连接,两者之间形成沿y轴方向延伸的移动副。
64.x向微动块111的x向限位头112伸入于第一微动限位槽122和第二微动限位槽131内;其中,x向微动块111与所述y向微动块121之间的移动副为x轴,在x向限位头112对第一微动限位槽122在x轴两端的限位作用下,x向微动块111只能沿x轴向移动;此时y向微动块121与所述微动单元承载台13之间的移动副为y轴向延伸,x向限位头112伸入第二微动限位槽131后,对第二微动限位槽131在y轴两端进行限位,即y向微动块121会相对沿y轴方向移动于微动单元承载台13,并带动其表面的x向微动块111沿y轴方向移动;基于此结构下,x向微动块111提供只能沿x轴移动的限制,y向微动块121提供只能沿y轴移动的限制,实现了x轴和y轴的微调节,提高了位置检测装置3的移动精确度。
65.本方案中,将x向微动块111、y向微动块121和微动单元承载台13呈叠式连接方式,通过三者之间的移动副准确地在x轴和y轴向移动,提高了移动精确度。
66.x向微动单元11和y向微动单元12可包括:具有驱动移动功能的微动驱动器,以实现x向微动块111和y向微动块121的移动功能,比如公知的压电陶瓷、磁致伸缩元件等微运动元件,微运动元件可按需要设置于x向微动块111、y向微动块121和微动单元承载台13三者任意位置或三者之间的位置;本申请中的附图仅通过物块结构表达y向微动单元12在微动单元承载台13上有移动副进行约束,x向微动单元11在y向微动单元12有移动副进行约束。
67.更优地,所述位置检测装置3包括:检测接收装置31和检测发器装置32;
68.所述检测接收装置31安装于所述x向微动块111;所述检测接收装置31活动于所述检测发器装置32的表面以内和/或以外;所述检测接收装置31活动于所述检测发器装置32的表面时,所述检测接收装置31获取自身在所述检测发器装置32的x轴和y轴的所在位置。
69.检测接收装置31安装于x向微动块111,先通过x向宏驱动单元21和y向宏驱动单元22两者对检测接收装置31的位置进行粗定位,再通过x向微动单元11和y向微动单元12对对检测接收装置31的位置进行精定位,且检测接收装置31的接收感活动于检测发器装置32;检测接收装置31在检测发器装置32的移动过程中,检测发器装置32持续向检测接收装置31发送精密位置信息,检测接收装置31将精密位置信息反馈至工控机4,由工控机4对x向微动单元11、y向微动单元12、x向宏驱动单元21和y向宏驱动单元22控制,直至目标位置与与实际位置之差的绝对值在精度内,即完成定位;由于检测接收装置31靠近或接触于检测发器装置32,两者之间的距离近,感应时间可忽略,因此识别精度高,配合x向微动块111、y向微动块121和微动单元承载台13呈叠式连接方式以及相邻两叠层之间的移动副,确保了检测接收装置31的位移定位精确度。
70.检测接收装置31和检测发器装置32为一般具有感应装置配合,如平面光栅、激光尺等精密位置检测装置3,其高精检测精度
△
≤运动平台分辨率。
71.优选地,所述x向微动块111于所述x向限位头112的上端设有承载功能的顶部限位端113;所述顶部限位端113的底部抵靠于所述y向微动块121的上表面;所述y向微动块121
的底部抵靠于所述微动单元承载台13的上表面;
72.所述检测接收装置31安装于所述x向限位头112的下端。
73.顶部限位端113具有承载功能,能用于放置任意需要运动传送的承载物5,比如精密电子器件,如微小的晶体管、小型柔性机器人等精密电子器件;能确保承载物5精确地传送至特定的位置。
74.本xy宏微运动平台可实现xy两个方向的宏微复合运动,其能在全行程中实时在线闭环反馈,xy微台终端采用了下端固连位置检测装置3,上端放置承载物5,使承载物5的位置得到实时在线感知识别,对承载物5的操作位置进行准确把握,提高操作精度。
75.更优地,所述检测接收装置31和检测发器装置32相向接触,且两者通过相向设置的平面接触。
76.检测接收装置31位于x向限位头112的下端,因此x向限位头112在移动时,检测发器装置32能向上支撑检测接收装置31,进一步地为x向限位头112提供支撑力,平面接触能提高检测接收装置31在检测发器装置32表面的移动流畅度,检测发器装置32能支撑检测接收装置31,提高移动稳定性,移动的阻力小。
77.优选地,还包括:工控机4;
78.所述工控机4与所述位置检测装置3通讯连接;所述工控机4用于控制所述x向微动单元11、y向微动单元12、x向宏驱动单元21和y向宏驱动单元22。
79.工控机4能持续接收精密位置信息,并通过精密位置信息控制x向微动单元11、y向微动单元12、x向宏驱动单元21和y向宏驱动单元22,反馈采用宏动和微动绝对位移记录,结合上位机系统,比较xy宏微误差,实现高精补偿;采用x微动=x目标
‑
x当前,y微动=y目标
‑
y当前的方法确定末端高精度平面定位,使承载物5精确地传送至指定位置。
80.一种xy宏微运动平台的末端反馈方法,包括以下步骤:
81.步骤1:如图3所示为整体结构的控制流程图,首先由工控机4分别对x向宏驱动单元21和y向宏驱动单元22进行控制,实现x向微动单元117(末端位置)的x向和y向的宏动粗定位;
82.步骤2:根据位置检测装置3获取的精密位置信息反馈至工控机4,当目标位置a’与实际位置a之差的绝对值在精度内,由工控机4分别对x向微动单元11和y向微动单元12进行x向和y向的微动精定位,直至实际位置目标位置a’与实际位置a之差的绝对值在精度内。
83.由于宏微运动平台中宏动单元的位置信息反馈装置与终端位置相隔较远,宏微平台整体结构复杂,导致结构非线性复杂度高等问题,终端位置信息无法由宏驱动单元位置反馈信息获取,而传统的位置反馈装置(如直线光栅尺)只能观测单自由度的位置信息。
84.本专利提出一种xy宏微运动平台的末端反馈方法,该运动平台在终端微动单元底部放置平面检测装置接收器,x向、y向宏驱动单元驱动微动单元承载台13的整体结构进行xy位置的粗定位,采用层叠式的微调组件1能实现误差解耦,有效解决大行程中高速、高加速和高精度的矛盾问题,实现全行程二维大行程闭环反馈控制,提高了承载物的精定位。
85.更优地,所述步骤2中,x向的定位具体包括步骤(3
‑
1):
86.步骤(3
‑
1):
87.如图4所示为x向宏微精密定位流程图;x向最终定位d1=h1 w1,首先由工控机4设定x向宏动目标位置h1至x向宏驱动单元21,给定控制输入,使x向宏驱动单元21运动;由x向
宏驱动单元21读数h2;当目标位置h1与实际位置h2之差的绝对值在精度e内,x向宏驱动单元21静止不动,启动x向微动单元11进行精定位;当目标位置h1与实际位置h2之差的绝对值在精度e外,则继续控制x向宏驱动单元21,直至目标位置h1与实际位置h2之差的绝对值在精度e内;
88.当启动x向微动单元11,由工控机4设定x向微动目标位置w1至x向微驱动单元,由检测接收装置31获取x向读数w2,当目标位置w1与实际位置w2之差的绝对值在精度e内,即实现精密定位,控制结束;当目标位置w1与实际位置w2之差的绝对值在精度e外,则继续控制x向微动单元11,直至目标位置w1与实际位置w2之差的绝对值在精度e内。
89.优选地,所述步骤2中,y向的定位具体包括以下步骤:
90.步骤(3
‑
2):
91.如图5所示为y向宏微精密定位流程图;y向最终定位d2=h3 w3;首先由工控机4设定y向宏动目标位置h3至y向宏驱动单元22,给定控制输入,使y向宏驱动单元22运动,由y向宏驱动单元22读数h4;当目标位置h3与实际位置h4之差的绝对值在精度e1内,y向宏驱动单元22静止不动,启动y向微动单元12进行精定位;
92.当目标位置h3与实际位置h4之差的绝对值在精度e1外,则继续控制y向宏驱动单元22,直至目标位置h3与实际位置h4之差的绝对值在精度e1内;
93.当启动y向微动单元12,由工控机4设定y向微动目标位置w1至y向微驱动单元,由平面检测位置获取x向读数w3,当目标位置w3与实际位置w4之差的绝对值在精度e1内,则可实现精密定位;当目标位置w3与实际位置w4之差的绝对值在精度e1外,则继续控制x向微动单元11,直至目标位置w3与实际位置w4之差的绝对值在精度e1内。
94.以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。