1.本发明涉及汽车发动机技术领域,尤其涉及一种基于电机调速的发 动机启动控制。
背景技术:
2.基于p2构型或类似的混合动力构型包括k0离合器、电机和发动机, 发动机的动力和电机的动力经由k0离合器进行耦合,然后由双离合器 传递到变速器或由其它机电耦合装置再传递到车轮端并驱动车轮行驶。 在对发动机进行启动控制时,需要实现的是k0离合器、电机和发动机 三者转速的耦合,而常见的实现方法是将转速加速到超过目标怠速转 速,然后让转速下降,达成耦合。
3.目前常用的发动机启动方法为:电机先启动并拖动发动机转速提 升,随后发动机点火喷油提升自身扭矩,而电机的扭矩则在拖动完发动 机后变为零,发动机的转速利用发动机本身的惯量自然下降或发动机自 动调节,当转速下降到相应的要求后,电机和发动机直接以充电的方式 进行耦合。此种发动机启动方法虽然能够让发动机正常启动,但是在降 低发动机转速的这一过程中,仅能依靠发动机自身的惯量来降低转速或 发动机自身的扭矩调节,而不能通过离合器k0在过调时使用电机负扭 矩降低发动机转速,对发动机转速的控制效果不佳,控制的鲁棒性较差, 且易导致发动机振动进而产生噪音等问题,影响乘坐体验。
技术实现要素:
4.有鉴于此,本发明提供了一种基于电机调速的发动机启动控制。
5.本发明提供的基于电机调速的发动机启动控制,所述基于电机调速 的发动机启动控制包括使电机和发动机交替相互拖拽,调整二者的扭 矩,以使电机和发动机的转速达到耦合,其包括以下步骤:
6.电机起动提速拖动控制:电机起动并持续提升转速和扭矩;
7.发动机点火加速控制:电机拖动发动机提升转速,发动机点火喷油, 提升自身扭矩;
8.发动机转速耦合控制:发动机停止喷油,降低自身扭矩,电机实施过 零控制,降低自身扭矩变为负扭矩,电机、发动机和k0离合器完成转 速耦合。
9.进一步地,其包括:
10.发动机扭矩耦合控制:电机调速,持续降低自身扭矩后提升自身扭 矩,发动机恢复扭矩,提升自身扭矩的同时带动电机提升电机的扭矩, 随后发动机起动,提升自身扭矩并拖动电机提升电机的扭矩,电机和发 动机完成扭矩耦合;
11.怠速充电控制:调整发动机和电机的扭矩至各自的稳定怠速充电时 的目标扭矩。
12.进一步地,所述电机起动提速拖动控制包括电机起动阶段a、电机 扭矩峰值阶段b和电机提速阶段c。
13.进一步地,在电机起动阶段a,电机转速由转速零位提升至电机初 始转速点s1,电机扭矩由电机初始扭矩点m1提升至电机第二扭矩点 m2处,电机响应初始扭矩点m1处的扭矩为标定值,电机第二扭矩点m2处的扭矩为标定好的电机拖动开始的扭矩峰值。
14.进一步地,在电机扭矩峰值阶段b中,电机的扭矩达到峰值,电机 的转速由电机初始转速点s1降低至电机第二转速点s2,电机的扭矩在 这个阶段保持不变,由电机第二扭矩点m2处扭矩延续至电机第二副扭 矩点m2'处。
15.进一步地,在电机提速阶段c中,电机的转速先由电机第二转速点 s2处的提升至电机第三转速点s4处,再由电机第三转速点s4处降低至 电机第四转速点s5处,电机的扭矩由电机第二副扭矩点m2'处降低至电 机第三扭矩点m3,发动机的转速由转速零位提升至发动机第一转速点 s3处并持续上升,k0离合器的扭矩由k0离合器第一扭矩点k1处变为 k0离合器第一副扭矩点k1'处,k0离合器第一扭矩点k1处的扭矩值与 k0离合器第一副扭矩点k1'处的扭矩值相同,电机第三扭矩点m3处的 扭矩值至少需要相当于使k0离合器能够稳定地拖动发动机的转速达到 发动机第二转速点s6所需的扭矩值,电机第四转速点s5处的转速值与 发动机第二转速点s6的转速值相同。
16.进一步地,所述发动机点火加速控制包括电机拖动发动机阶段d、 发动机点火喷油阶段e和发动机转速提升阶段f。
17.进一步地,在电机拖动发动机阶段d中,k0离合器的转速和发动 机的转速在电机的拖动下持续提升,电机的扭矩由电机第三扭矩点m3 处逐渐下降,k0离合器的扭矩由k0离合器第一副扭矩点k1'处提升至 k0离合器第二扭矩点k2处,k0离合器第二扭矩点k2的扭矩值为发动 机怠速稳定最低扭矩加上离合器拖拽附加扭矩
▽
t
k
。
18.进一步地,在发动机点火喷油阶段e中,发动机开始点火喷油,k0 离合器的转速和发动机的转速在电机的拖动下继续提升,发动机的扭矩 由发动机第一扭矩点e1处提升至发动机第二扭矩点e2处,k0离合器 的扭矩由k0离合器第二扭矩点k2处持续提升,电机的扭矩在拖动发动 机的同时持续下降,发动机第二扭矩点e2处的扭矩值为发动机空怠速 稳定最低扭矩,根据实际各工况进行标定。
19.进一步地,在发动机转速提升阶段f中,k0离合器的转速和发动 机的转速在电机的拖动下继续提升,发动机的扭矩由发动机第二扭矩点 e2处提升至发动机第三扭矩点e3处,k0离合器的扭矩继续提升,电机 的扭矩在拖动发动机的同时持续下降,发动机第三扭矩点e3处的扭矩 值取发动机第二转速点s6增加至转速第一耦合点s7之间转速差的增量 的一半所对应的扭矩差。
20.进一步地,所述发动机转速耦合控制包括发动机停止喷油阶段g、 电机快速降矩阶段h、电机过零阶段i、电机调速阶段j和发动机扭矩恢 复阶段k。
21.进一步地,在发动机停止喷油阶段g中,发动机停止喷油,k0离 合器的转速和发动机的转速在电机的拖动下继续提升,电机的扭矩持续 下降至电机第四扭矩点m4处,k0离合器的扭矩持续提升,发动机的扭 矩由发动机第三扭矩点e3处下降至发动机第四扭矩点e4处,随后从发 动机第四扭矩点e4处下降至发动机第五扭矩点e5处,发动机第五扭矩 点e5的扭矩值在车辆由静止起动的静止工况下为零,电机第四扭矩点 m4处的扭矩值取k0离合器第二扭矩点k2处的扭矩值与发动机第四扭 矩点e4处的扭矩值之间。
22.进一步地,在电机快速降矩阶段h中,k0离合器的转速和发动机 的转速在电机的
拖动下持续提升,电机的扭矩由电机第四扭矩点m4处 的扭矩下降至电机第五扭矩点m5处的扭矩,k0离合器的扭矩继续提升, 发动机的扭矩保持不变,电机第五扭矩点m5处的扭矩值为电机实施过 零控制前的扭矩值。
23.进一步地,在电机过零阶段i中,k0离合器的转速、发动机的转速 和电机的转速在转速第一耦合点s7达成耦合;电机实施过零控制,电 机的扭矩由电机第五扭矩点m5处下降至电机第六扭矩点m6处,k0离 合器的扭矩提升至k0离合器第三扭矩点k3处,发动机的扭矩继续保持 不变,电机第六扭矩点m6处的扭矩值是电机执行过零控制之后的扭矩 值。
24.进一步地,在电机调速阶段j中,电机对自身进行调速,已经耦合 的k0离合器的转速、发动机的转速和电机的转速由转速第一耦合点s7 逐渐下降,电机的扭矩由电机第六扭矩点m6处下降至电机第七扭矩点 m7处后,又提升至电机第八扭矩点m8处,k0离合器的扭矩由k0离 合器第三扭矩点k3处下降;发动机的扭矩由第五扭矩点e5处保持至发 动机第六扭矩点e6处,电机第七扭矩点m7处的扭矩值至少相当于两倍 的使电机的转速由转速第一耦合点s7处下降到转速第二耦合点s8处所 需的负扭矩值,转速第二耦合点s8处的转速值为怠速稳定转速前扭矩 耦合提速的起始转速,其与点s9处的转速值之间有设定的差速,发动 机第七扭矩点e7处的扭矩值为发动机第二扭矩点e2处的扭矩值减去用 于扭矩耦合提升的偏移量,k0离合器第四扭矩点k4处的扭矩值为发动 机第七扭矩点e7的扭矩值加上离合器传递拖拽值。
25.进一步地,在发动机扭矩恢复阶段k中,发动机增加扭矩,已经耦 合的k0离合器的转速、发动机的转速和电机的转速下降至转速第二耦 合点s8处,电机的扭矩由电机第八扭矩点m8处提升至电机第九扭矩点 m9处;发动机的扭矩由发动机第六扭矩点e6处提升至发动机第七扭矩 点e7处,k0离合器的扭矩下降至k0离合器第四扭矩点k4处,转速第 二耦合点s8处的转速值为怠速稳定转速前扭矩耦合提速的起始转速, 为标定值,发动机第七扭矩点e7处的扭矩值为发动机第二扭矩点e2处 的扭矩值减去用于扭矩耦合提升的偏移量,k0离合器第四扭矩点k4处 的扭矩值为发动机第七扭矩点e7的扭矩值加上离合器传递拖拽值。
26.进一步地,所述发动机扭矩耦合控制包括发动机起动阶段l。
27.进一步地,在发动机起动阶段l中,已经耦合的k0离合器的转速、 发动机的转速和电机的转速由转速第二耦合点s8处提升至转速第三耦 合点s9处,电机的扭矩在发动机的带动下由电机第九扭矩点m9处提升 至电机第十扭矩点m10处,发动机的扭矩由发动机第七扭矩点e7处提 升至发动机第八扭矩点e8处,k0离合器的扭矩由k0离合器第四扭矩 点k4处提升至k0离合器第五扭矩点k5处,电机第十扭矩点m10处的 扭矩最大值最大与电机第六扭矩点m6处的扭矩值相同。
28.进一步地,所述怠速充电控制包括调整电机扭矩至怠速阶段m。
29.进一步地,在调整电机扭矩至怠速阶段m中,电机的扭矩由电机第 十扭矩点m10处下降至电机第十一扭矩点m11处,即电机的稳定怠速 充电时的目标扭矩,发动机的扭矩由发动机第八扭矩点e8处提升至发 动机第九扭矩点e9处,即发动机的稳定怠速充电时的目标扭矩,k0离 合器的扭矩由k0离合器第五扭矩点k5处提升至k0离合器第六扭矩点 k6处,即k0离合器的能力扭矩。
30.进一步地,所述基于电机调速的发动机启动控制包括对于静态工况 下发动机的
启动控制和对于动态工况下发动机的启动控制。
31.进一步地,对于动态工况下发动机的启动控制包括电机扭矩准备控 制阶段、电机拖动发动机扭矩阶段、发动机点火加速阶段和扭矩耦合阶 段。
32.本发明本发明的基于电机调速的发动机启动控制能使电机和发动 机交替相互拖拽,调整二者的扭矩,以使电机和发动机的转速和转速达 到耦合,通过在发动机断油后利用电机的扭矩变化来精确调节转速的耦 合,发动机的起动时间耗时较短,响应可控,提高了发动机起动的可靠 性和精确性,控制起动鲁棒性叫好且平顺性通过标定可控。
33.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明 的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上 述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并 配合附图,详细说明如下。
附图说明
34.图1为车辆静态工况下发动机启动控制的示意图。
35.图2为车辆动态正常驱动行车工况下发动机启动控制的示意图。
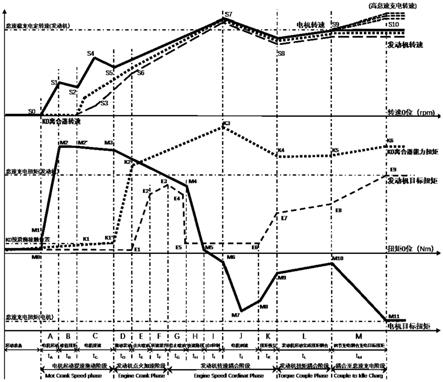
36.图3为车辆动态起步变油门动力需求工况下发动机启动控制的示意 图。
具体实施方式
37.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及 功效,以下结合附图及较佳实施例,对本发明详细说明如下。
38.首先需要说明的是,本发明基于电机调速的发动机启动控制包括静 态工况和动态工况下发动机的启动控制,静态工况包括汽车处于静止状 态时的工况,而动态工况则包括汽车正常行车的工况、汽车已经起步且 发动机正常运转的工况,下面以静态工况为例对发动机启动控制进行说 明。
39.发动机启动控制过程需要涉及发动机起动过程拖动相关目标扭矩 设置及控制过程时间的估算,为进行起动过程拖动相关目标扭矩设置及 控制过程时间的估算,需要引入k0离合器、发动机、电机的扭矩及转 速响应的基本边界参数,这也是分析起动及停机过程动力学的基础,具 体如下:
40.电机扭矩响应能力系数:dermotmax;
41.离合器扭矩响应冲击系数:dertqcltjerk;
42.发动机扭矩响应能力系数:derengmax;
43.电机转速差响应能力系数:rpmmotjerk;
44.发动机转速差响应能力系数:rpmengjerk;
45.离合器转速差响应能力系数:rpmcltjerk;
46.发动机控制最低响应时间:tsmin_eng;
47.离合器控制最低响应时间:tsmin_clt;
48.电机过零控制冲击系数:derzeromotmax;
49.另外,还需要引入p2构型的混合动力构型发动机的刚性模型中的 常见参数,具体如下:
50.发动机转动惯量:j
e
;
51.车轮至双离合器端等效到输入轴上的转动惯量:j
p
;
52.k0离合器转动惯量:j
k
;
53.双离合器转动惯量:j
c
;
54.电机转速惯量:j
m
;
55.飞轮端扭矩(发动机起动时为起动阻力扭矩):t
e
;
56.k0离合器扭矩能力:t
k
;
57.电机实际输出扭矩:t
m
;
58.k0离合器处等效残余扭矩:t
r
;
59.传递到车辆端扭矩:t
t
;
60.发动机转动角速度:ω
e
;
61.k0离合器转动角速度:ω
k
;
62.电机转动角速度:ω
m
;
63.双离合器转动角速度:ω
p
;
64.车轮转动角速度:ω
w
;
65.总传动比:τ;
66.整车质量:m;
67.车速:u;
68.车轮滚动半径:r;
69.请参阅图1,在本实施例中,图1中上面的两根横轴从上到下分别 表示转速零位和扭矩零位。
70.进一步地,图1中的横轴从左至右按时间顺序表示本发明中的步骤 的逐渐推进,其中a、b、c、d和e等分别表示本发明的基于电机调速 的发动机启动控制的不同阶段,该阶段的最小持续时间分别为t
a
、t
b
、 t
c
、t
d
和t
e
等。
71.进一步地,图1中的多条折线分别为电机转速线、发动机转速线、 k0离合器转速线、k0离合器扭矩线、发动机扭矩线和电机扭矩线,其 中电机转速线、发动机转速线和k0离合器转速线以转速零位为轴,k0 离合器扭矩线、发动机扭矩线和电机扭矩线以扭矩零位为轴。
72.电机转速线、发动机转速线和k0离合器转速线这三根折线上的点 s1、s2和s3等分别表示在本发明的发动机启动控制的过程中电机或发 动机的转速点,这些点处的转速值分别为和等;
73.电机扭矩线上的点m1、m2和m3等分别表示在本发明的发动机启 动控制的过程中电机的电机扭矩点,这些点处的扭矩值分别为和等;
74.发动机扭矩线上的点e1、e2和e3等分别表示在本发明的发动机启 动控制的过程中发动机的发动机扭矩点,这些点处的扭矩值则对应分别 为和等;
75.k0离合器扭矩线上的点k1、k2和k3等分别表示在本发明的发动 机启动控制的过程中k0离合器的k0离合器扭矩点,这些点处的扭矩值 则对应分别为和等;
76.进一步地,本发明的基于电机调速的发动机启动控制包括使电机和 发动机交替相互拖拽,调整二者的扭矩,以使电机和发动机的转速和转 速达到耦合,具体包括以下步
骤:
77.电机起动提速拖动控制:电机起动并持续提升转速和扭矩;
78.具体地,电机起动提速拖动控制包括电机起动阶段a、电机扭矩峰 值阶段b和电机提速阶段c。
79.在电机起动阶段a中,电机启动,电机的转速由转速零位s0处的 转速值提升至电机初始转速点s1处的转速值,即电机初始转速电 机的扭矩由电机初始扭矩点m1处的扭矩值提升至电机第二扭矩点m2 处的扭矩值。
80.电机初始扭矩点m1处的扭矩值为标定值,在本实施例中取电机初 始扭矩的值为20nm;电机第二扭矩点m2处的扭矩值为标定好的电 机拖动开始扭矩峰值,该值取决于发动机起动阻力的大小、离合器的扭 矩由离合器第一扭矩点k1提升至离合器第二扭矩点k2的最快响应时间 和发动机的转速由发动机第一转速点s3提升至发动机第二转速点s6的 最快需求时间。
81.电机初始转速点s1处的电机初始转速可表示为:
[0082][0083]
电机起动阶段a的最小持续时间t
a
可表示为:
[0084][0085]
在电机扭矩峰值阶段b中,电机的扭矩达到峰值,电机的转速由电 机初始转速点s1降低至电机第二转速点s2;电机的扭矩在这个阶段保 持不变,由电机第二扭矩点m2处的扭矩延续至电机第二副扭矩点m2' 处的扭矩;
[0086]
由于此时电机已经到达了起动峰值,需响应稳定控制性能,因此电 机扭矩峰值阶段b的最小持续时间t
b
通过标定确定;在电机起动阶段a 和电机扭矩峰值阶段b中,k0离合器对电机存在拖拽并在拖拽过程中 逐渐提升自身扭矩,因此电机第二转速点s2处的转速值,即电机第二 转速可表示为:
[0087][0088]
在电机提速阶段c中,电机的转速先由电机第二转速点s2处的转 速提升至电机第三转速点s4处的转速,再由电机第三转速点s4处的转 速降低至电机第四转速点s5处的转速;电机的扭矩由电机第二副扭矩 点m2'处的扭矩降低至电机第三扭矩点m3处的扭矩;发动机的转速由 转速零位s0处的转速提升至发动机第一转速点s3处的转速并持续上 升;k0离合器的扭矩由k0离合器第一扭矩点k1处的扭矩变为k0离 合器第一副扭矩点k1'处的扭矩,k0离合器第一扭矩点k1处的扭矩值 与k0离合器第一副扭矩点k1'处的扭矩值相同,即k0离合器的扭矩在 电机提速阶段c保持不变;
[0089]
电机第三扭矩点m3处的扭矩值至少需要相当于使k0离合器能够 稳定地拖动发动机的转速达到发动机第二转速点s6所需的扭矩值,在 本实施例中,电机第四转速点s5处的
转速值与发动机第二转速点s6的 转速值相同,因此电机第三扭矩点m3处的电机第三扭矩可表示为:
[0090][0091]
电机提速阶段c阶段的最小持续时间t
c
可表示为:
[0092][0093]
发动机点火加速控制:转速较高的电机拖动转速较低的发动机提升 转速,发动机随后点火喷油,提升自身扭矩;
[0094]
具体地,发动机点火加速控制包括电机拖动发动机阶段d、发动机 点火喷油阶段e和发动机转速提升阶段f。
[0095]
在电机拖动发动机阶段d中,k0离合器的转速和发动机的转速在 电机的拖动下持续提升并逐渐接近电机的转速;电机的扭矩由电机第三 扭矩点m3处的扭矩逐渐下降;k0离合器的扭矩由k0离合器第一副扭 矩点k1'处的扭矩提升至k0离合器第二扭矩点k2处的扭矩;
[0096]
k0离合器第二扭矩点k2的扭矩值为发动机怠速稳定最低扭矩加上 离合器拖拽附加扭矩
▽
t
k
,该离合器拖拽附加扭矩是一个工程量,根据 具体情况标定,因此k0离合器第二扭矩可表示为:
[0097][0098]
电机拖动发动机阶段d的最小持续时间t
d
可表示为:
[0099][0100]
在发动机点火喷油阶段e中,发动机开始点火喷油;k0离合器的 转速和发动机的转速在电机的拖动下继续提升并逐渐接近电机的转速; 发动机的扭矩由发动机第一扭矩点e1处的扭矩提升至发动机第二扭矩 点e2处的扭矩;k0离合器的扭矩由k0离合器第二扭矩点k2处的扭矩 持续提升;电机的扭矩在拖动发动机的同时持续下降;
[0101]
发动机第二扭矩点e2处的扭矩值,即发动机第二扭矩为发动机 空怠速稳定最低扭矩,一般根据实际各工况进行标定。
[0102]
在发动机转速提升阶段f中,k0离合器的转速和发动机的转速在 电机的拖动下继续提升并进一步接近电机的转速;发动机的扭矩由发动 机第二扭矩点e2处的扭矩提升至发动机第三扭矩点e3处的扭矩;k0 离合器的扭矩持续提升;电机的扭矩在拖动发动机的同时持续下降;
[0103]
发动机第三扭矩点e3处的扭矩值,即发动机第三扭矩在本实施 例中取发动机第二转速点s6增加至转速第一耦合点s7之间转速差的增 量的一半所对应的扭矩差,可表示为:
[0104][0105]
发动机转速提升阶段f的最小持续时间t
f
可表示为:
[0106][0107]
发动机转速耦合控制:发动机停止喷油,降低自身扭矩,电机实施 过零控制,降低自身扭矩变为负扭矩,电机、发动机和k0离合器完成 转速耦合,随后电机调速,持续降低自身扭矩后提升自身扭矩,发动机 再次喷油,提升自身扭矩的同时带动电机提升电机的扭矩,完成转速的 耦合。
[0108]
具体地,发动机转速耦合控制发动机停止喷油阶段g、电机快速降 矩阶段h、电机过零阶段i、电机调速阶段j和发动机扭矩恢复阶段k。
[0109]
在发动机停止喷油阶段g中,发动机停止喷油;k0离合器的转速 和发动机的转速在电机的拖动下持续提升并更加接近电机的转速;电机 的扭矩持续下降至电机第四扭矩点m4处的扭矩;k0离合器的扭矩持续 提升;发动机的扭矩由发动机第三扭矩点e3处的扭矩下降至发动机第 四扭矩点e4处的扭矩,随后从发动机第四扭矩点e4处的扭矩下降至发 动机第五扭矩点e5处的扭矩;
[0110]
发动机第五扭矩点e5的扭矩值,即发动机第五扭矩在车辆由静 止起动的静止工况下为零;电机第四扭矩点m4处的扭矩值取k0离合 器第二扭矩点k2处的扭矩值与发动机第四扭矩点e4处的扭矩值之间以 便使电机的转速不至于回落过快;发动机停止喷油阶段g的最小持续时 间t
g
需要考虑到发动机停机所需要最小时间
▽
t
停机
以及扭矩差的响应冲 击,因此发动机停止喷油阶段g的最小持续时间t
g
可表示为:
[0111][0112]
在电机快速降矩阶段h中,k0离合器的转速和发动机的转速在电 机的拖动下持续提升并更进一步接近电机的转速;电机的扭矩由电机第 四扭矩点m4处的扭矩下降至电机第五扭矩点m5处的扭矩;k0离合器 的扭矩持续提升;发动机的扭矩保持不变;
[0113]
发动机第六扭矩与发动机第五扭矩相同,其值也为零,电机 第五扭矩点m5处的扭矩值为电机实施过零控制前的扭矩值,视具体过 零扭矩控制需求标定,在本实施例中取电机第五扭矩为标定值2nm; 电机快速降矩阶段h阶段的最小持续时间t
h
由电机扭矩响应能力决定, 可表示为:
[0114][0115]
在电机过零阶段i中,k0离合器的转速、发动机的转速和电机的转 速在转速第一耦合点s7达成耦合;电机实施过零控制,电机的扭矩由 正扭矩变为负扭矩,即由电机第五扭矩点m5处的扭矩下降至电机第六 扭矩点m6处的扭矩;k0离合器的扭矩提升至k0离合器
第三扭矩点k3 处的扭矩,发动机的扭矩继续保持不变;
[0116]
电机第六扭矩点m6处的扭矩值是电机执行过零控制之后的扭矩 值,需要考虑到传动齿轮间隙和响应冲击等具体参数进行标定优化,在 本实施例中取电机第六扭矩为标定值-7nm;电机过零阶段i的最小 持续时间t
i
可表示为:
[0117][0118]
在电机调速阶段j中,电机对自身进行调速;已经耦合的k0离合 器的转速、发动机的转速和电机的转速由转速第一耦合点s7逐渐下降; 电机的扭矩由电机第六扭矩点m6处的扭矩下降至电机第七扭矩点m7 处的扭矩后,又提升至电机第八扭矩点m8处的扭矩;k0离合器的扭矩 由k0离合器第三扭矩点k3处的扭矩下降;发动机的扭矩继续保持不变;
[0119]
电机第七扭矩点m7处的扭矩值经过了电机的调速,目的是快速地 将发动机的转速与电机的转速都拖拽下来,因此其至少需要相当于两倍 的使电机的转速由转速第一耦合点s7处的转速值下降到转速第二耦合 点s8处的转速值所需的负扭矩值,因此电机第七扭矩点m7处的电机第 七扭矩可表示为:
[0120][0121]
电机第八扭矩点m8处的电机第八扭矩可表示为:
[0122][0123]
电机调速阶段j阶段的最小持续时间t
j
可表示为:
[0124][0125]
在发动机扭矩恢复阶段k中,发动机快速增加扭矩;已经耦合的 k0离合器的转速、发动机的转速和电机的转速下降至转速第二耦合点 s8处的转速;电机的扭矩由电机第八扭矩点m8处的扭矩提升至电机第 九扭矩点m9处的扭矩;发动机的扭矩由发动机第六扭矩点e6处的扭矩 (发动机第六扭矩点e6处的扭矩与第五扭矩点e5处的扭矩相等)提升 至发动机第七扭矩点e7处的扭矩;k0离合器的扭矩下降至k0离合器 第四扭矩点k4处的扭矩;
[0126]
转速第二耦合点s8处的转速值为怠速稳定转速前扭矩耦合提速的 起始转速,在本实施例中是标定值,标定其与点s9处的转速值之间有 200rpm左右的差速以便在后续阶段中电机的扭矩和发动机的扭矩能够 完全耦合;发动机第七扭矩点e7处的扭矩值为发动机第二扭矩点e2处 的扭矩值减去一个用于扭矩耦合提升的偏移量,该偏移量是为了将由电 机主导调节的转速耦合转变为由发动机主导调节的扭矩耦合的增量,根 据具体情况标定;k0离合器第四扭矩点k4处的扭矩值最低为发动机第 七扭矩点e7的扭矩值加上离合器传递拖拽值;电机第九扭矩点m9处的 扭矩值与发动机第七扭矩点e7处的扭矩值和转速第二耦合点s8处的转 速值可能产生的波动而附加的负扭矩有关,该负扭矩也是一个工程量, 根据具体情况标定,因此电机第九扭矩可表示为:
[0127][0128]
发动机扭矩耦合控制:发动机起动,提升自身扭矩并拖动电机提升电 机的扭矩,电机和发动机完成扭矩耦合;
[0129]
具体地,发动机扭矩耦合控制包括发动机起动阶段l。
[0130]
在发动机起动阶段l中,已经耦合的k0离合器的转速、发动机的 转速和电机的转速由转速第二耦合点s8处的转速提升至转速第三耦合 点s9处的转速;电机的扭矩在发动机的带动下由电机第九扭矩点m9 处的扭矩提升至电机第十扭矩点m10处的扭矩;发动机的扭矩由发动机 第七扭矩点e7处的扭矩提升至发动机第八扭矩点e8处的扭矩;k0离 合器的扭矩由k0离合器第四扭矩点k4处的扭矩提升至k0离合器第五 扭矩点k5处的扭矩;
[0131]
电机第十扭矩点m10处的扭矩值与电机第六扭矩点m6处的扭矩值 相同,避免了再次对电机进行过零控制;发动机第八扭矩点e8处的发 动机第八扭矩可表示如下:
[0132][0133]
发动机起动阶段l的最小持续时间t
l
可表示为:
[0134][0135]
怠速充电控制:调整发动机和电机的扭矩至各自的稳定怠速充电时 的目标扭矩。
[0136]
具体地,怠速充电控制包括调整电机扭矩至怠速阶段m。
[0137]
在调整电机扭矩至怠速阶段m中,电机的扭矩由电机第十扭矩点 m10处的扭矩下降至电机第十一扭矩点m11处的扭矩,即电机的稳定怠 速充电时的目标扭矩;发动机的扭矩由发动机第八扭矩点e8处的扭矩 提升至发动机第九扭矩点e9处的扭矩,即发动机的稳定怠速充电时的 目标扭矩;k0离合器的扭矩由k0离合器第五扭矩点k5处的扭矩提升 至k0离合器第六扭矩点k6处的扭矩,即k0离合器的能力扭矩;
[0138]
k0离合器的能力扭矩为高出发动机目标扭矩的标定值;电机第十一 扭矩点m11处的扭矩值为稳定怠速充电时电机的目标扭矩,该扭矩需要 综合电机的充电功率、充电转速以及充电效率等计算得出,因此电机第 十一扭矩点m11处的扭矩值,即电机第十一扭矩可表示为:
[0139][0140]
调整电机扭矩至怠速阶段m的最小持续时间t
m
可表示为:
[0141][0142]
请一并参阅图2和图3,进一步地,本发明还包括动态工况下的发 动机启动控制,图2和图3分别代表车辆正常驱动行车工况发动机起动 和起步变油门动力需求的发动机起动两种工况,下面以汽车正常行车 时,即正常驱动行车工况下的发动机启动控制为例进行
说明,其包括电 机扭矩准备控制阶段、电机拖动发动机扭矩阶段、发动机点火喷油阶段 和扭矩耦合阶段。这两种工况控制策略上的符号,如m1、m2、e1等都 代表相同或相似的计算目标关系。
[0143]
具体地,与在静态工况的发动机启动控制下类似,在电机拖动发动 机扭矩阶段,电机启动后迅速提升自身扭矩,由电机初始扭矩点m1提 升至电机扭矩峰值——电机第二扭矩点m2,即电机第二副扭矩点m2', 在电机的扭矩达到峰值时,发动机开始喷油。该峰值扭矩与静态工况下 的起动峰值扭矩有不同之处,其为在发动机未起动时的正常驱动电机目 标扭矩的基础上按照静态工况起动的扭矩进行类似的叠加但控制目标 值可以根据实际情况进行适当优化。
[0144]
在电机拖动发动机阶段,电机在拖动发动机的扭矩和k0离合器的 扭矩提升的同时自身开始降矩。
[0145]
在发动机点火喷油阶段,发动机的扭矩迅速提升至发动机第二扭矩 e2处的扭矩后回落至发动机第二副扭矩e2'处的扭矩,电机的扭矩下降 至电机第四扭矩m4处的扭矩。
[0146]
在扭矩耦合阶段,电机快速降矩,发动机在自身扭矩提升的同时耦 合电机提升电机的扭矩,电机和发动机完成扭矩耦合并最终到达驾驶需 求目标扭矩。
[0147]
与在静态工况下不同,由于动态工况下不存在发动机通过停止喷油 来实现快速降扭这一过程,由于车辆动态工况电机的转速与车速具有固 定速比档位连接关系,因此电机、发动机和k0离合器三者的转速不存 在静态工况发动机起动时目标怠速转速的调节需求且电机也不需要进 行过零控制,因而不存在电机第五扭矩点m5和电机第六扭矩点m6及 其对应的扭矩,同理,也不存在发动机第三扭矩点e3、发动机第四扭矩 点e4和发动机第五扭矩点e5及其对应的扭矩,也就是说在动态工况下 的发动机点火喷油阶段,发动机的扭矩将跳过仅在静态工况下存在的上 述扭矩点,由发动机第二扭矩点e2处的扭矩直接下降到发动机第六扭 矩点e6处的扭矩,从而使电机的转速调节和扭矩耦合同时进行控制,而 同时做到转速和扭矩耦合的关键点相比静态工况需要k0离合器的扭矩 作动态的调节。另外,动态工况下的电机和发动机的目标扭矩也不一定 为稳定怠速充电扭矩,视具体工况和车辆的实际行驶需求而定。
[0148]
综上所述,本发明的基于电机调速的发动机启动控制能使电机和发 动机交替相互拖拽,调整二者的扭矩,以使电机和发动机的转速和扭矩 达到耦合,通过在发动机断油后利用电机的扭矩变化来精确调节转速的 耦合,发动机的起动时间耗时较短,响应可控,提高了发动机起动的可 靠性和精确性,控制起动鲁棒性叫好且平顺性通过标定可控。
[0149]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形 式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定 本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内, 当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效 实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对 以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技 术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

