1.本实用新型涉及线缆清扫机器人。
背景技术:
2.早期架设的电缆一般为无外包绝缘保护层,即电缆以裸线方式架设。这样一来,电缆上的积尘或者污垢会造成线路短路,从而引发跳闸等事故。为了提高裸露的架空输电线输电安全性,需要通过喷涂机器人在电缆外侧喷涂绝缘漆形式以提高其绝缘性能。但在喷涂作业之前需要对裸露的电缆进行清洗,以清除积聚在电缆上的积尘或污垢等。
3.于是人们实用新型了线缆清扫机器人,通过机器人在高空线缆上运行,对线缆进行清洗,为了清洗干净,一般都设置上下两组清洗轮将线缆抱住后进行清洗,由于线缆高度从几米到几十米,这就是机器人挂接到线缆上造成不便,往往在将机器人挂接到线缆上就需要花费大量的时间。
技术实现要素:
4.本实用新型的目的在于提供线缆清扫机器人,能够有效解决线缆清扫机器人挂接不方便的问题。
5.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:线缆清扫机器人,包括机架和清扫机构,所述清扫机构包括上清扫组件和下清扫组件,所述上清扫组件和下清扫组件分别设置在线缆长度方向前后两端的机架上,所述上清扫组件位于线缆上方,所述下清扫组件位于线缆下方;
6.所述下清扫组件包括下架、移动控制机构和下清扫轮,所述下架竖直平面内摆动或者竖直滑动设置在机架上,所述下清扫轮设置在下架上,所述移动控制机构设置在下架和机架之间。
7.优选的,所述下架一端转动连接在机架上,所述下架的另一端设置有所述下清扫轮;或者,所述机架上设有滑杆,所述下架滑动设置在滑杆上,两种不同实现下架摆动或者移动的具体方式。
8.优选的,所述移动控制机构包括弹性顶升装置、下拉电机和拉线,所述弹性顶升装置一端转动连接在机架上,弹性顶升装置另一端转动连接在下架的下方,所述下拉电机固定在下架下方的机架上,所述拉线一端固定连接在下架上,拉线的另一端由下拉电机驱动收放,通过下拉电机收放拉线的长度,控制摆臂下拉,再完成机器人挂接工作后,利用弹性顶升装置的弹力,时下清扫轮能贴紧线缆的下部,对线缆下部进行清扫作业。
9.优选的,所述弹性顶升装置为氮气弹簧或者压簧,可以提供足够向上的弹力,无需使用外接能源,并且长期运行稳定可靠。
10.优选的,所述下架上设有下清扫电机,所述下清扫电机驱动下清扫轮转动。
11.优选的,所述上清扫组件包括上清扫轮、上清扫电机、上清扫座和滑杆,所述滑杆竖直设置且顶部固定在机架上,所述上清扫座滑动设置在滑杆上,所述上清扫电机固定在
上清扫座上,所述上清扫电机驱动上清扫轮转动,根据线缆粗细,上清扫座可以在滑杆上自动调节位置,利用其自身重量压在线缆上,对线缆上部进行清扫作业。
12.优选的,所述机架上还设有两组行走轮,两组所述行走轮沿线缆长度方向前后设置,且两组所述行走轮均位于线缆上方,两组行走轮的设置,可以保持运行时整个机器人的稳定,同时方便机器人挂在线缆上。
13.优选的,所述行走轮的圆周面开有内凹的环形凹槽,所述行走轮的外侧壁固定有直径大于行走轮直径的轮缘,内凹的环形凹槽可以增大与线缆的接触面,让运行更加平稳,利用轮缘进一步防止运行时线缆脱出行走轮。
14.优选的,两个行走轮之间的机架上还转动连接有等电位机构,所述等电位机构包括至少两个等电位触片,所述等电位触片和机架之间还设有弹片,通过弹片将等电位触片顶出,保持等电位触片始终接触线缆,自动适配不同直径的线缆,确保机器人运行安全。
15.优选的,所述机架上还设有检测下架位置的限位开关,通过限位开关控制下架下摆或者下移的幅度,避免移动控制机构过度运行造成损坏。
16.与现有技术相比,本实用新型的优点是:通过移动控制机构调整下架的位置,从而在将线缆清扫机器人挂接到线缆上时,竖直方向可以让出足够的空间,方便施工人员操作,大大降低了机器人挂接所需的时间,同时在取下机器人时也十分便捷,而在挂接完毕后,还能通过移动控制机构调整下架的位置,让下清扫轮可以很好的接触线缆的下部,与上清扫组件一起配合,将电缆清扫干净。
附图说明
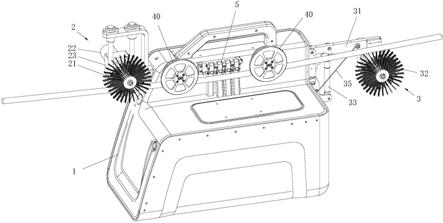
17.图1为本实用新型线缆清扫机器人的在清扫时的立体图;
18.图2为本实用新型线缆清扫机器人去掉上下清扫轮后的正面的结构示意图;
19.图3为本实用新型线缆清扫机器人去掉上下清扫轮后的背面的结构示意图;
20.图4为本实用新型中等电位机构正面的结构示意图;
21.图5为本实用新型中等电位机构背面的结构示意图。
22.机架1、上清扫组件2、上清扫轮21、上清扫电机22、上清扫座23、滑杆24、下清扫组件3、下架31、下清扫轮32、弹性顶升装置33、下拉电机34、拉线35、下清扫电机36、限位开关37、行走轮40、环形凹槽41、轮缘42、等电位机构5、等电位触片51、弹片52、接触金属片53。
具体实施方式
23.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
24.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固
定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
26.参阅图1至图3为本实用新型线缆清扫机器人的实施例,线缆清扫机器人,包括机架1和清扫机构,所述清扫机构包括上清扫组件2和下清扫组件3,所述上清扫组件2和下清扫组件3分别设置在线缆长度方向前后两端的机架1上,所述上清扫组件2位于线缆上方,所述下清扫组件3位于线缆下方;
27.所述下清扫组件3包括下架31、移动控制机构和下清扫轮32,所述下架31 一端转动连接在机架1上,所述下架31的另一端连接所述下清扫轮32,所述移动控制机构设置在下架31和机架1之间。
28.通过下清扫组件3的摆臂,可以控制下清扫轮32在竖直方向内摆动,而由移动控制机构来操控下架31的摆动,在将线缆清扫机器人挂接到线缆上时,竖直方向可以让出足够的空间,方便施工人员操作,大大降低了机器人挂接所需的时间,同时在取下机器人时也十分便捷。
29.具体的,机架1上安装有两组行走轮40,两组行走轮40结构相同,且沿线缆长度方向前后布置,两个行走轮40可以都连接主电机驱动转动,也可以只有其中一个作为主动轮,行走轮40的圆弧面上开有内凹的环形凹槽41,以便于更好的与线缆接触,同时保证行走时线缆位于行走面内,当然,为了防止行走时线缆脱出行走轮40,可以在行走轮40的最外侧加装直径大于行走轮40直径的轮缘42。
30.如图4、图5所示,在两个行走轮40之间的机架1上安装等电位机构5,等电位机构包括四个等电位触片,每个等电位触片的顶端均与机架1转动连接,同时在等电位触片51的上部与机架1之间设置弹片52,每个等电位接触片51 均与机架1上的接触金属片53连接,通过接触金属片与机架上各部位电连接,确保在机器人运行时,等电位触片能始终与线缆接触,保证整个机器人的运行安全。
31.上清扫组件2包括上清扫轮21、上清扫电机22、上清扫座23和滑杆24,滑杆24竖直设置且顶部固定在机架1上,上清扫座23滑动设置在滑杆24上,上清扫电机22固定在上清扫座23上,上清扫电机22驱动上清扫轮21转动,这样根据不同的线缆直径,上清扫座23可以自动调节其竖直方向位置,始终保持对线缆的下压力,确保其清洗力度。
32.而下清扫组件3中使用的移动控制机构包括弹性顶升装置33、下拉电机34 和拉线35,由于下清扫组件3是要从线缆的下部向上顶,对线缆的下部进行清扫,所以弹性顶升机构一般可以选择产生向上推力的元件,如氮气弹簧或者压簧,将弹性顶升装置33一端转动连接在机架1上,另一端转动连接在摆杆上,以保证在清扫时给下清扫轮32足够的推力。但是在将机器人安装在线缆上时,竖直方向需要足够的空间,因此,设置下拉电机34和拉线35,下拉电机34固定在下架31下方的机架1上,拉线35一端固定连接在下架31上,拉线35的另一端由下拉电机34驱动收放,通过下拉电机34的旋转,对拉线35进行收放,从而控制下架31的摆动,装卸机器人时在竖直方向留出足够的空间。并且在下架31的下方设置限位开关37,当下拉电机34带动拉线35将下架31向下拉时,下架31一旦触碰到限位开关37,下拉电机34就停止运行,保护下拉过程中弹性顶升装置33不会损坏。上清扫轮21和下清扫轮32都采
用具有一定柔性的钢丝轮,能更好的包裹住线缆,同时具有良好的清扫效果。
33.机器人使用时,先开启下拉电机34,下拉电机34将拉线35卷起,拉线35 带动下架31向下旋转,使下清扫轮32与行走轮40之间的竖直距离加大,将机器人挂在待清洗的线缆上,线缆卡入两个行走轮40的环形凹槽41中,同时由于弹片52的作用,等电位触片51也紧贴在线缆上,上清扫轮21由于其自身重量压在线缆上。安装完毕后,再次启动下拉电机34进行放线操作,将拉线35 放出,由于弹性顶升装置33的作用,下架31带动下清扫轮32向上运行,下清扫轮32将从下方贴紧线缆,完成机器人安装工作。然后启动带动下清扫轮32 旋转的下清扫电机36,启动带动上清扫轮21旋转的上清扫电机22,再启动主电机,带动行走轮40开始在线缆上运行,对线缆上的鸟粪、氧化膜等进行清扫。
34.本实用新型的机器人可以保持在线缆上的平稳运行,同时和线缆保持良好等电位特性,清扫效率高,利用可摆动的下清扫组件3,在装卸机器人的时候都非常方便,大大降低装卸机器人所需的时间,并且可以自动适配多种不同直径的线缆,对其进行清扫作业。
35.上述方案中,下清扫组件也可以竖直滑动设置在机架上,通过在机架上设置竖直的滑杆或者直线导轨,下架滑动设置在滑杆或直线导轨上,利用移动控制机构就能控制下架的上下滑动,从而也能实现上述功能。
36.以上所述仅为本实用新型的具体实施例,但本实用新型的技术特征并不局限于此,任何本领域的技术人员在本实用新型的领域内,所作的变化或修饰皆涵盖在本实用新型的专利范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。