1.本实用新型涉及清洁机器人领域,具体涉及一种应用于水下清洁机器人的清洁模块。
背景技术:
2.现有水下清洁机器人的平面清洁模块在清洁效率上不稳定。在使用过一段时间后,壁面上的污垢会藏匿在平面清洁模块里,导致模块的清洁效率降低。已经使用过的平面清洁模块,即使藏匿的污垢不多,长时间放在水下会滋生更多的污垢。这样不仅可能达不到解放部分人力的初衷,甚至可能会投入更多的人力来更换清洁模块提高机器人的清洁效率,清洁效率低。由于平面清洁模块本身的结构特殊,在清洁范围上也会受到一定限制,如果只能单纯地清洁鱼缸的平直壁面,那么在清洁鱼缸的曲面时就会显得鸡肋。
技术实现要素:
3.本实用新型所要解决的技术问题是:现有水下机器人的平面清洁模块清洁效率低、清洁范围小,不适用于存在曲面的鱼缸,本实用新型提供了解决上述问题的一种应用于水下清洁机器人的清洁模块。
4.本实用新型通过下述技术方案实现:
5.一种应用于水下清洁机器人的清洁模块,包括安装组件、立体旋转刷头以及与立体旋转刷头连接的推进器;
6.所述安装组件包括空心轴和安装台阶;所述空心轴穿过所述安装台阶套设在所述推进器的输出轴的外侧;
7.所述立体旋转刷头安装在所述安装台阶上;所述立体旋转刷头内部设有支撑结构。所述支撑结构在躲避推进器输出轴的同时,能够支撑起压电传感器。
8.可选的,所述安装台阶为圆柱台阶。
9.优选的,所述支撑结构上安装有一个压电传感器。
10.优选的,所述立体旋转刷头最外层设有纤维毛。
11.具体的,所述支撑结构包括用于隔离刷毛的第一杯型结构和用于支撑压电传感器的第二杯型结构。
12.优选的,所述第一杯型结构安装在所述安装台阶上,所述第二杯型结构安装在所述空心轴上,且位于所述第一杯型结构与所述安装台阶之间。
13.优选的,所述空心轴的穿出端与所述推进器通过螺母固定。
14.本实用新型的工作原理:
15.当水下清洁机器人调整到工作姿态后,通过所述立体旋转刷头相对的推进器提供压力,将立体旋转刷头逼近到待清洁内表面上,当立体旋转刷头内部压电传感器检测到设定的压力指令参数后,刷头停止逼近,开始旋转清洁。在离心力的作用下,立体旋转刷头的纤维毛上附着的污垢会逐渐脱离纤维毛,很大程度上实现了的清洁模块的自清洁,提高了
清洁效率。当清洁鱼缸内其他表面(如假山)时,可根据水下清洁机器人提供的参数,调整推进方案,进而调整刷头的形状、纤维毛与待清洁表面之间的压力,从而达到能够根据不同的待清洁表面定制相应的清洁模式,提高了水下清洁机器人的清洁范围。当机器人在缸内移动时,刷头会带动周围的水,涡流会带动部分已经沉到缸底或缸内装饰物表面上的污垢,配合鱼缸配置的水处理系统,能够提高清洁效率。
16.本实用新型具有如下的优点和有益效果:
17.本实用新型一种应用于水下清洁机器人的清洁模块,将立体旋转刷头安装在水下清洁机器人,并在立体旋转刷头内设置压电传感器,一方面实现了水下清洁机器人清洁模块的自清洁,提高了清洁效率;另一方面能够根据待清洁表面的特性实时改变刷头的形状以及纤维毛与待清洁表面之间的压力,定制相应的清洁模式,提高了机器人本体的清洁范围。
附图说明
18.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本申请的一部分,并不构成对本实用新型实施例的限定。在附图中:
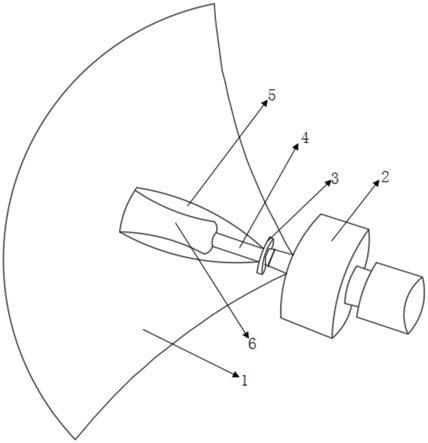
19.图1为本实用新型一种应用于水下清洁机器人的清洁模块的结构图。
20.附图中标记及对应的零部件名称:
[0021]1‑
立体旋转刷头,2
‑
推进器,3
‑
安装台阶,4
‑
安装轴,5
‑
第一杯型结构,6
‑
第二杯型结构。
具体实施方式
[0022]
为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
[0023]
实施例
[0024]
现有水下清洁机器人的平面清洁模块在使用过一段时间后,壁面上的污垢会藏匿在平面清洁模块里,导致模块的清洁效率降低。已经使用过的平面清洁模块,即使藏匿的污垢不多,长时间放在水下会滋生更多的污垢。这样不仅可能达不到解放部分人力的初衷,甚至可能会投入更多的人力来更换清洁模块提高机器人的清洁效率,清洁效率低。由于平面清洁模块本身的结构特殊,在清洁范围上也会受到一定限制,如果只能单纯地清洁鱼缸的平直壁面,那么在清洁鱼缸的曲面时就会显得鸡肋。
[0025]
本实施例提出了一种应用于水下清洁机器人的清洁模块,具体结构如图1所示,包括安装组件、立体旋转刷头1以及与立体旋转刷头连接的推进器2;安装组件包括安装台阶(3)和空心轴4;空心轴4穿过安装台阶3套设在推进器2的输出轴的外侧;立体旋转刷头1安装在安装台阶3上;立体旋转刷头1内部设有支撑结构。支撑结构在躲避推进器输出轴螺母的同时,能够支撑起压电传感器。
[0026]
本实施例中,安装台阶3为圆柱台阶。支撑结构上设有压电传感器。立体旋转刷头1最外层设有纤维毛。支撑结构包括用于隔离刷毛的第一杯型结构5和用于支撑压电传感器的第二杯型结构6,第一杯型结构5安装在安装台阶3上,第二杯型结构6安装在空心轴4上,
且位于第一杯型结构5与安装台阶3之间。空心轴4的穿出端与推进器2通过螺母固定。
[0027]
本实施例的安装台阶为圆柱台阶。
[0028]
本实用新型的工作原理:
[0029]
当水下清洁机器人调整到工作姿态后,通过立体旋转刷头相对的推进器2提供压力,将立体旋转刷头1逼近到待清洁内表面上,当立体旋转刷头1内部压电传感器检测到设定的压力指令参数后,刷头停止逼近,开始旋转清洁。在离心力的作用下,立体旋转刷头的纤维毛上附着的污垢会逐渐脱离纤维毛,很大程度上实现了的清洁模块的自清洁,提高了清洁效率。当清洁鱼缸内其他表面(如假山)时,可根据水下清洁机器人提供的参数,调整推进方案,进而调整刷头的形状、纤维毛与待清洁表面之间的压力,从而达到能够根据不同的待清洁表面定制相应的清洁模式,提高了水下清洁机器人的清洁范围。由于刷头安装在推进器的输出轴上,当机器人在缸内移动时,刷头会带动周围的水,涡流会带动部分已经沉到缸底或缸内装饰物表面上的污垢,配合鱼缸配置的水处理系统,能够提高清洁效率。
[0030]
以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种应用于水下清洁机器人的清洁模块,其特征在于,包括安装组件、立体旋转刷头(1)以及与立体旋转刷头连接的推进器(2);所述安装组件包括安装台阶(3)和空心轴(4);所述空心轴(4)穿过所述安装台阶(3)套设在所述推进器(2)的输出轴的外侧;所述立体旋转刷头(1)安装在所述安装台阶(3)上;所述立体旋转刷头(1)内部设有支撑结构。2.根据权利要求1所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述安装台阶为圆柱台阶。3.根据权利要求1所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述支撑结构上设有压电传感器。4.根据权利要求1所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述立体旋转刷头(1)最外层设有纤维毛。5.根据权利要求1所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述支撑结构包括用于隔离刷毛的第一杯型结构(5)和用于支撑压电传感器的第二杯型结构(6)。6.根据权利要求5所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述第一杯型结构(5)安装在所述安装台阶(3)上,所述第二杯型结构(6)安装在所述空心轴(4)上,且位于所述第一杯型结构(5)与所述安装台阶(3)之间。7.根据权利要求1所述的一种应用于水下清洁机器人的清洁模块,其特征在于,所述空心轴(4)的穿出端与所述推进器(2)通过螺母固定。
技术总结
本实用新型公开了一种应用于水下清洁机器人的清洁模块,包括安装组件、立体旋转刷头以及与立体旋转刷头连接的推进器;安装组件包括空心轴和安装台阶;空心轴穿过安装台阶套设在推进器的输出轴的外侧;立体旋转刷头安装在所述安装台阶上;立体旋转刷头内部设有支撑结构。本实用新型将立体旋转刷头安装在水下清洁机器人,并在立体旋转刷头内设置压电传感器,一方面实现了水下清洁机器人清洁模块的自清洁,提高了清洁效率;另一方面能够根据待清洁表面的特性实时改变刷头的形状以及纤维毛与待清洁表面之间的压力,定制相应的清洁模式,提高了机器人本体的清洁范围。提高了机器人本体的清洁范围。提高了机器人本体的清洁范围。
技术研发人员:武燕 周杰 罗强 杜博枝 梁同 金启刚 杜娟 严立甫 王媛 周晓庆 郭兴吉
受保护的技术使用者:西南科技大学城市学院
技术研发日:2021.02.02
技术公布日:2021/10/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。