1.本发明属于湖泊底泥原位修复技术领域,更具体地说是涉及一种浮动式污染湖泊底泥高效原位稳定化处理系统。
背景技术:
2.近几十年来,伴随着工业和社会的高速发展,我国自然环境和生态系统遭到严重破坏,大量河道、湖泊等水体污染严重,人类健康受到严重威胁。大量难降解污染物质、致病菌和重金属离子等随着水体中泥沙和胶体物质的沉降积累到水体底部,成为底泥的一部分。但是,沉积在底泥中的各种污染物和重金属在适当条件下通过与上覆水体间发生物理、化学和生物作用重新释放到水体中,是造成水体二次污染的内源性污染源。因此在污染湖泊河流整治中,底泥污染整治是决定水体污染治理成败的关键和难点之一。
3.目前,底泥原位修复技术因其可以避免疏浚产生水体二次污染,底泥无需额外场地堆放处理,有效降低污染物毒性和迁移,且修复费用较低、处理工作容易展开等优点,越来越受到人们的重视并越来越多的应用于污染水体底泥修复中。诸多底泥原位修复技术和方法中涉及到的均为掩蔽物料抛洒摊铺、修复剂注射等相关设备,对于集底泥强力快速搅拌、修复剂同步注射、泥水快速复氧等功能于一体,且可以漂浮于水体表面移动作业的污染底泥高效原位稳定化处理系统目前尚不多见。
4.因此,如何提供一种集底泥搅拌、修复剂注射、泥水复氧等功能于一体的底泥高效原位修复处理系统是本领域技术人员亟需解决的问题。
技术实现要素:
5.针对上述问题,本发明的目的在于提供一种浮动式污染湖泊底泥高效原位稳定化处理系统,不仅可以实现底泥与修复剂的快速均匀混合、水体底部快速复氧,使污染物快速降解、底部厌氧环境快速改善,而且可以漂浮于水体表面移动作业,提高了系统的灵活性和机动性。
6.为实现上述发明目的,本发明采用的技术方案为:
7.一种浮动式污染湖泊底泥高效原位稳定化处理系统,包括:浮箱系统、液压挖掘机主机及配套液压动力系统、底泥搅拌系统、修复剂调配系统、修复剂输送控制系统和驳船;其中,所述浮箱系统固定于所述液压挖掘机主机及配套液压动力系统底部的外侧,所述底泥搅拌系统与所述液压挖掘机主机及配套液压动力系统相连接,所述修复剂调配系统、所述修复剂输送控制系统置于所述驳船上,所述修复剂调配系统通过所述修复剂输送控制系统与所述底泥搅拌系统连接,所述驳船由所述液压挖掘机主机及配套液压动力系统牵引。
8.优选的,所述浮箱系统为高强度材料制成的中空箱体结构,中空箱体内部分割成若干个独立密闭单元。
9.优选的,所述液压挖掘机主机及配套液压动力系统包括:液压挖掘机主机、配套液压动力系统和摇臂,所述配套液压动力系统分别与所述液压挖掘机主机、摇臂传动连接,所
述摇臂安装在所述液压挖掘机主机上。
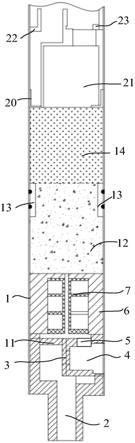
10.优选的,所述底泥搅拌系统包括:液压马达、基板模块以及锥桶;所述液压马达输出端与所述基板模块连接,所述基板模块与所述锥桶连接,其中,所述锥桶设置有修复剂投加口,所述锥桶外壁均匀分布有搅拌牙板,所述搅拌牙板上带有牙板开孔。
11.优选的,所述修复剂调配系统包括:液态药剂储料罐和粉剂储料罐,所述液态药剂储料罐和所述粉剂储料罐由控制转换阀门联通。
12.优选的,所述修复剂输送控制系统包括:高压计量泵和输送软管,所述高压计量泵通过管路与所述修复剂调配系统连接,所述高压计量泵与所述输送软管连接,所述输送软管与所述底泥搅拌系统连接。
13.优选的,还包括北斗导航系统和rtk导航系统,北斗导航系统和rtk导航系统,实现修复区域全覆盖无死角作业。
14.本发明提供的一种浮动式污染湖泊底泥高效原位稳定化处理系统,与现有技术相比具有以下优点:
15.1、浮动式作业,机动性和灵活性强
16.整套处理系统可浮漂于水体表面,依靠液压挖掘机主机的履带划动水体实现在水中自由行走;在旱地,液压挖掘机主机宽大的履带可越过沟坎沼泽,抵达需要修复的区域。因此,该系统具有极高的机动性和灵活性。
17.2、污染泥水同治,施工便捷高效
18.该系统在对污染底泥搅拌的同时,可实现修复剂的同步投加,一次性完成污染水体和底泥的同步治理,无需分步实施和多种机械反复作业,简化了施工流程、提高了实施效率,并极大降低了工程施工中的能源消耗。
19.3、模块化组合,系统可靠性强
20.整套处理系统采取模块化组合,安装实施方便快捷,安全可靠性高。浮箱系统通过螺栓与液压挖掘机主机的驱动轴连接,底泥搅拌系统通过连接基板模块与液压挖掘机的摇臂连接,修复剂调配系统通过快接接头与修复剂输送控制系统连接,驳船通过快速承插锁定结构与液压挖掘机主机相连。从而实现整个处理系统的快速组装集成。
21.4、rtk导航作业,修复区域无死角
22.该系统可以耦合rtk(载波相位差分技术)准确获取修复区域的边界信息,对系统的修复行走路线进行智能规划,做到整个修复区域全覆盖,实现处理修复无死角。
23.5、修复剂按需计量,效果好成本低
24.该系统投加修复剂采用高压计量泵,依据底泥污染程度确定的修复剂用量,精确控制投加量,节约修复剂成本,避免浪费。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
26.图1为本发明整体结构示意图。
27.图2为浮箱系统结构示意图。
28.图3为底泥搅拌系统结构示意图。
29.图4为修复剂调配系统结构示意图。
30.图5为修复剂输送控制系统结构示意图。
31.图中:1
‑
浮箱系统,2
‑
液压挖掘机主机及配套液压动力系统,3
‑
底泥搅拌系统,4
‑
修复剂调配系统,5
‑
修复剂输送控制系统,6
‑
驳船,101
‑
浮箱密闭单元,102
‑
浮箱安装孔,301
‑
液压马达,302
‑
搅拌牙板,303
‑
搅拌牙板开孔,304
‑
修复剂投加口,305
‑
连接基板模块,306
‑
锥桶,401
‑
液态药剂储料罐,402
‑
粉剂储料罐,403
‑
控制转换阀门,501
‑
高压计量泵,502
‑
输送软管。
具体实施方式
32.下面结合附图和实施例,对本发明的技术方案作进一步说明:
33.如图1
‑
5所示,本发明提供了一种浮动式污染湖泊底泥高效原位稳定化处理系统,该系统包括浮箱系统1、液压挖掘机主机及配套液压动力系统2、底泥搅拌系统3、修复剂调配系统4、修复剂输送控制系统5和驳船6。浮箱系统1固定于液压挖掘机主机及配套液压动力系统2底部的外侧,底泥搅拌系统3与液压挖掘机主机及配套液压动力系统2相连接,修复剂调配系统4、修复剂输送控制系统5置于驳船6上,修复剂调配系统4通过修复剂输送控制系统5与底泥搅拌系统3连接,驳船6由液压挖掘机主机及配套液压动力系统2牵引。
34.浮箱系统1为高强度材料制成的中空箱体结构,中空箱体内部分割成若干个独立密闭单元。
35.液压挖掘机主机及配套液压动力系统2包括:液压挖掘机主机、配套液压动力系统和摇臂,所述配套液压动力系统分别与液压挖掘机主机、摇臂传动连接,摇臂安装在液压挖掘机主机上。
36.底泥搅拌系统3包括:液压马达301、基板模块305以及锥桶306;液压马达301与基板模块305连接,基板模块305与锥桶306连接,其中,锥桶306带有修复剂投加口304,锥桶306外壁均匀分布有搅拌牙板302,牙板上带有牙板开孔303。
37.修复剂调配系统4包括:液态药剂储料罐401和粉剂储料罐402,液态药剂储料罐401和粉剂储料罐402由控制转换阀门403联通。
38.修复剂输送控制系统5包括:高压计量泵501和输送软管502,高压计量泵501通过管路与修复剂调配系统4连接,高压计量泵501与输送软管502连接,输送软管502与底泥搅拌系统3连接。
39.本发明还包括北斗导航系统和rtk导航系统,北斗导航系统和rtk导航系统,实现修复区域全覆盖无死角作业。
40.在需要进行底泥原位修复的河涌、湖泊等水域,将浮箱系统1通过安装孔102与液压挖掘机主机及配套液压动力系统2连接,再将底泥搅拌系统3通过连接基板模块305与液压挖掘机主机及配套液压动力系统2连接,然后操作液压挖掘机主机驶入水中,浮箱系统1提供的浮力大于液压挖掘机主机及配套液压动力系统2的重力,使液压挖掘机漂浮于水面;然后再将修复剂调配系统4和修复剂输送控制系统5装上驳船6,将修复剂调配系统4的液态药剂储料罐401通过控制转换阀门403与粉剂储料罐402组装连接起来,然后再由控制转换
阀门403与修复剂输送控制系统5连接,再通过输送软管502连接高压计量泵501与底泥搅拌系统3的修复剂投加口304。最后将驳船6通过快速锁止结构与液压挖掘机连接固定后缓慢拖入水中。
41.在对污染湖泊底泥进行原位修复时,首先由实验确定出单位污染底泥所需修复剂的最佳投加量,以及采用的修复剂的形态(液态、粉末状,或两种类型的组合),然后将修复剂置入修复剂调配系统4内,打开修复剂输送控制系统5并启动液压挖掘机主机及配套液压动力系统2,使底泥搅拌系统3对底泥和同步由修复剂投加口304投加的修复剂进行高速搅拌,确保底泥与修复剂充分混合。
42.按照污染湖泊底泥进行原位修复的范围和设计的行走路线,该浮动式污染湖泊底泥高效原位稳定化处理系统一边移动一边完成对底泥的修复工作。
43.通过上述步骤,实现污染湖泊底泥的原位高效稳定化处理。
44.本发明的工作原理是:
45.液压挖掘机主机及配套液压动力系统2由于浮箱系统1的浮力作用漂浮于水面上,如在陆地上一样,液压挖掘机主机的履带转动可以拨动水体,使液压挖掘机主机自由在水面上行走;同时,在浅水区或旱地,浮箱系统1不影响液压挖掘机正常行走,从而实现了液压挖掘机的水陆两栖功能。底泥搅拌系统3通过与摇臂相连,并通过液压挖掘机配套的液压动力系统驱动底泥搅拌系统3的叶片高速旋转,通过将液压挖掘机摇臂探入水底实现对底泥的快速搅拌。同时,通过修复剂调配系统4将调制合格的修复剂输送至修复剂输送控制系统5,修复剂输送控制系统5再通过输送软管502输送至底泥搅拌系统3的端头部位,使修复剂与底泥均匀混合。在底泥搅拌系统3高速搅拌底泥的过程中,带动大量的空气进入泥水混合物中,由于剧烈的湍流作用,大量的氧气溶解于搅拌的泥水混合物中,同时在高效修复剂的作用下,污泥和水体中的污染物得到快速分解稳定。另外,驳船6承载着修复剂调配系统4和修复剂输送控制系统,由液压挖掘机迁移随工作面移动,极大提高了整个处理系统的机动性和灵活性,从而确保底泥原位稳定化处理的施工效率。
46.本说明书中对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。