1.本公开属于航空发动机控制领域,具体涉及一种航空发动机加速控制计划的融合控制方法。
背景技术:
2.控制计划是控制系统所遵循的所有规则的总称。它描述了直接可控参数、控制目标参数、发动机约束参数、发动机外部环境条件、发动机工作状态等多个影响因素的共同关联关系。发动机在过渡状态更容易触碰各种物理边界,从而要求过渡态控制应在不超过任何物理工作极限的情况下保证优良的调节性能,而加速过程控制作为典型的过渡态控制,最常触碰的约束就是高压压气机喘振裕度的限制。航空发动机控制中通常所指的加速控制计划就是加速过程关于喘振裕度的限控计划,所有形式的加速过程都受到该计划的约束。
3.目前常见的加速控制计划包括n
‑
dot控制计划和换算燃油流量控制计划。采用n
‑
dot控制计划对加速过程控制的优点之一是保证了发动机转子的加速性,并且它可以用闭环控制的方式使高压转子的加速度跟踪上目标n
‑
dot值,基本上不受燃油计量误差的影响。然而采用n
‑
dot控制计划来控制发动机加速过程易受到发动机功率提取、性能衰退、引气异常等方面的影响,从而导致发动机加速时越过实际的加速喘振限制线逼近失速边界,诱导压气机发生失速或喘振。用换算燃油流量控制计划限控发动机的加速不易受到功率提取的影响,但是换算燃油流量却容易受到传感器测量误差的影响,比如测量压气机后压力的传感器因出现漏气、气塞造成加速燃油流量计算的偏差,除此之外采用该控制计划的加速控制通常是开环控制,执行机构燃油计量装置的不准确也会导致控制器要求的燃油流量与发动机实际输入的燃油流量之间存在偏差,最终造成加速性能的下降。因此,传统的控制计划存在一定的局限性,随着新一代发动机对控制系统加速过程要求的进一步提高,需要设计新的控制计划来满足需求。
4.采用控制计划融合的方法是有效破解上述难题的重要手段,然而由于发动机工作包线宽广,影响因素众多,给控制计划的融合及在全包线的应用造成了很大困难。
5.在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成在本国中本领域普通技术人员公知的现有技术的信息。
技术实现要素:
6.针对现有技术中的不足,本公开的目的在于提供一种航空发动机加速控制计划的融合控制方法,能够避免n
‑
dot控制计划因功率提取、性能衰退、引气异常变化导致的喘振。
7.为实现上述目的,本公开提供以下技术方案:
8.一种航空发动机加速控制计划的融合控制方法,包括如下步骤:
9.s100:通过功率提取制造n
‑
dot控制计划所得燃油流量w
f,a
与换算燃油流量控制计划所得燃油流量w
f,b
的控制偏差e2=w
f,b
‑
w
f,a
;
10.s200:根据控制偏差e2对n
‑
dot控制计划所得燃油流量w
f,a
进行第一次修正,获得
第一次修正后的燃油流量w
f,c
;
11.s300:对第一次修正后的燃油流量w
f,c
中超过换算燃油流量控制计划获得的燃油流量w
f,b
的5%以上的燃油流量进行第二次修正,获得第二次修正后的燃油流量w
f,acc
,并将w
f,acc
作为融合控制计划获得的燃油输出值输入航空发动机的选择器。
12.优选的,步骤s200包括如下步骤:
13.s201:根据控制偏差e2和先验设计的非线性罚函数确定n
‑
dot控制计划的实时调整系数c
n
‑
dot
;
14.s202:根据实时调整系数c
n
‑
dot
对n
‑
dot控制计划的限控目标值进行更新,获得新的加速燃油增量δw
f,c
;
15.s203:对新的加速燃油增量δw
f,c
与航空发动机控制器上一周期输出的燃油流量w
f,s
求和,获得第一次修正后的燃油流量w
f,c
。
16.优选的,步骤s201中,所述先验设计的非线性罚函数表示为:
[0017][0018][0019]
其中,f1表示第一非线性罚函数,用于偏差e2为正时惩罚n
‑
dot限控目标值,f2表示第二非线性罚函数,用于偏差e2为负时增加n
‑
dot限控目标值,n2表示高压转子转速,t
st
表示海平面标准大气温度,表示进气总温。
[0020]
优选的,步骤s201中,所述实时调整系数c
n
‑
dot
表示为:
[0021][0022]
且
[0023][0024]
其中,c
n
‑
dot
为n
‑
dot控制计划的实时调整系数,用于获得修正后的目标n
‑
dot值,c
n
‑
dot
小于1表示减小原目标n
‑
dot值,大于1表示增加;k1为削减敏感参数,k1值越大曲线越陡峭,对目标n
‑
dot值的削减越明显,k2为低转速修正系数,φ为高压转子相对转速换算转速的函数,t
st
表示海平面标准大气温度,表示进气总温,n
2r
表示高压转子相对转速。
[0025]
优选的,步骤s202中,所述根据实时调整系数c
n
‑
dot
对n
‑
dot控制计划的限控目标值进行更新通过下式进行:
[0026][0027]
其中,δw
f,c
为新的加速燃油增量,为当前控制计划导出目标值,w
f,s
为控制器上一周期输出的燃油流量,δw
f,a
为n
‑
dot控制计划所得燃油流量w
f,a
与控制器上一周期输出的的燃油流量w
f,s
的偏差,g为第一次修正的修正函数。
[0028]
优选的,所述第一次修正的修正函数g表示为:
[0029][0030]
其中,k
p
为pid控制的比例增益,k
i
为pid控制的积分增益。
[0031]
优选的,步骤s204中,所述第一次修正后的燃油流量w
f,c
表示为:
[0032]
w
f,c
=δw
f,c
w
f,s
[0033]
其中,δw
f,c
为新的加速燃油增量,w
f,s
为控制器上一周期输出的燃油流量。
[0034]
优选的,步骤s300中,所述对第一次修正后的燃油流量w
f,c
中超过换算燃油流量控制计划获得的燃油流量w
f,b
的5%以上的燃油流量进行第二次修正通过下式进行:
[0035]
w
f,acc
=w
f,door
h(w
f,c
,w
f,lim
,w
f,door
)
[0036]
且
[0037][0038]
其中,w
f,door
表示n
‑
dot计划修正后的加速燃油流量开始二次修正的门槛值,w
f,lim
表示n
‑
dot计划得到的加速燃油流量极限值,h表示第二次修正的修正函数。
[0039]
与现有技术相比,本公开带来的有益效果为:
[0040]
1、本公开方法所控制的加速过程能够避免n
‑
dot控制计划因功率提取、性能衰退、引气异常变化导致的喘振,加速时间总是优于或相当于换算燃油流量控制计划,可以一定程度抵消气压传感器和燃油计量误差导致转速的提前下掉;
[0041]
2、本公开方法所控制的加速过程能承受功率提取、引气变化、气压传感器和燃油计量误差的范围最广,鲁棒性最好;
[0042]
3、本公开方法可以较好地适应全飞行包线范围的加速工作需要。
附图说明
[0043]
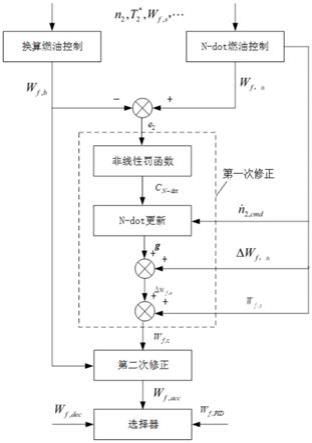
图1是本公开一个实施例提供的一种航空发动机加速控制计划的融合控制方法流程图;
[0044]
图2是本公开一个实施例提供的在飞行包线内随机生成的工作点;
[0045]
图3是本公开一个实施例提供的融合控制和换算燃油控制计划不同包线点加速时间的分布图;
[0046]
图4是本公开一个实施例提供的在扰动工作状态下n
‑
dot控制计划控制出现的飞行包线内的失速点分布图;
[0047]
图5是本公开一个实施例提供的在扰动工作状态下融合控制和换算燃油控制计划不同包线点加速时间的分布图;
[0048]
图6是本公开一个实施例提供的功率提取大小随时间变化曲线图;
[0049]
图7是本公开一个实施例提供的n
‑
dot控制计划的加速线;
[0050]
图8是本公开一个实施例提供的换算燃油流量控制计划控制的高压转子相对转速曲线;
[0051]
图9是本公开一个实施例提供的融合控制计划控制的高压转子相对转速曲线;
[0052]
图10是本公开一个实施例提供的在特定环境3种控制计划的功率提取能力对比
图;
[0053]
图11是本公开一个实施例提供的考虑引气和传感器误差或燃油计量误差的3种控制计划的功率提取对比图;
[0054]
图12是本公开一个实施例提供的融合控制计划优于n
‑
dot的传感器或燃油计量误差和引气量的空间范围;
[0055]
图13(a)、图13(b)是本公开一个实施例提供的融合控制计划和n
‑
dot控制计划分别控制下的加速过程最小喘振裕度图;
[0056]
图14是本公开一个实施例提供的融合控制计划和n
‑
dot控制计划分别控制下的喘振裕度的统计直方图;
[0057]
图15(a)、图15(b)是本公开一个实施例提供的换算燃油流量控制计划和融合控制计划控制的加速时间差;
[0058]
图16是本公开一个实施例提供的换算燃油流量控制计划和融合控制计划控制的加速时间差的统计直方图。
具体实施方式
[0059]
下面将参照附图1至图16详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0060]
需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本发明的范围。本公开的保护范围当视所附权利要求所界定者为准。
[0061]
为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
[0062]
一个实施例中,如图1所示,一种航空发动机加速控制计划的融合控制方法,包括如下步骤:
[0063]
s100:通过功率提取制造n
‑
dot控制计划所得燃油流量w
f,a
与换算燃油流量控制计划所得燃油流量w
f,b
的控制偏差e2=w
f,b
‑
w
f,a
;
[0064]
s200:根据控制偏差e2对n
‑
dot控制计划所得燃油流量w
f,a
进行第一次修正,获得第一次修正后的燃油流量w
f,c
;
[0065]
s300:对第一次修正后的燃油流量w
f,c
中超过换算燃油流量控制计划获得的燃油流量w
f,b
的5%以上的燃油流量进行第二次修正,获得第二次修正后的燃油流量w
f,acc
,并将w
f,acc
作为融合控制计划获得的燃油输出值输入航空发动机的选择器。
[0066]
上述实施例构成了本公开的完整技术方案,本公开所述方法所控制的加速过程能够避免n
‑
dot控制计划因功率提取、性能衰退、引气异常变化导致的喘振,加速时间总是优
于或相当于换算燃油流量控制计划,可以一定程度抵消气压传感器和燃油计量误差导致转速的提前下掉;另外,公开方法所控制的加速过程能承受功率提取、引气变化、气压传感器和燃油计量误差的范围最广,鲁棒性最好。
[0067]
另一个实施例中,步骤s200包括如下步骤:
[0068]
s201:根据控制偏差e2和先验设计的非线性罚函数确定n
‑
dot控制计划的实时调整系数c
n
‑
dot
;
[0069]
s202:根据实时调整系数c
n
‑
dot
对n
‑
dot控制计划的限控目标值进行更新,获得新的加速燃油增量δw
f,c
;
[0070]
s203:对新的加速燃油增量δw
f,c
与航空发动机控制器上一周期输出的燃油流量w
f,s
求和,获得第一次修正后的燃油流量w
f,c
。
[0071]
另一个实施例中,步骤s201中,所述先验设计的非线性罚函数表示为:
[0072][0073][0074]
其中,f1表示第一非线性罚函数,用于偏差e2为正时惩罚n
‑
dot限控目标值,f2表示第二非线性罚函数,用于偏差e2为负时增加n
‑
dot限控目标值,n2表示高压转子转速,t
st
表示海平面标准大气温度,表示进气总温。
[0075]
另一个实施例中,步骤s201中,所述实时调整系数c
n
‑
dot
表示为:
[0076][0077]
其中,c
n
‑
dot
为n
‑
dot控制计划的实时调整系数,用于获得修正后的目标n
‑
dot值,c
n
‑
dot
小于1表示减小原目标n
‑
dot值,大于1表示增加;k1为削减敏感参数,k1值越大曲线越陡峭,对目标n
‑
dot值的削减越明显。
[0078]
本实施例中,为了保持罚函数形式的简洁性、统一性和连续性,选择加强低转速的修正力度,获得的调整系数为:
[0079][0080]
其中,k2为低转速修正系数,φ为高压转子相对转速换算转速的函数,t
st
表示海平面标准大气温度,表示进气总温,n
2r
表示高压转子相对转速。
[0081]
另一个实施例中,所述根据实时调整系数c
n
‑
dot
对n
‑
dot控制计划的限控目标值进行更新通过下式进行:
[0082][0083]
其中,δw
f,c
为新的加速燃油增量,为当前控制计划导出目标值,w
f,s
为控制器上一周期输出的燃油流量,δw
f,a
为n
‑
dot控制计划所得燃油流量w
f,a
与控制器上一周期
输出的的燃油流量w
f,s
的偏差,g为第一次修正的修正函数。
[0084]
另一个实施例中,所述第一次修正的修正函数g表示为:
[0085][0086]
其中,k
p
为pid控制的比例增益,k
i
为pid控制的积分增益。
[0087]
另一个实施例中,步骤s204中,所述第一次修正后的燃油流量w
f,c
表示为:
[0088]
w
f,c
=δw
f,c
w
f,s
[0089]
其中,δw
f,c
为新的加速燃油增量,w
f,s
为控制器上一周期输出的燃油流量。
[0090]
另一个实施例中,所述对第一次修正后的燃油流量w
f,c
中超过换算燃油流量控制计划获得的燃油流量w
f,b
的5%以上的燃油流量进行第二次修正通过下式进行:
[0091]
w
f,acc
=w
f,door
h(w
f,c
,w
f,lim
,w
f,door
)
[0092]
且
[0093][0094]
其中,w
f,door
表示n
‑
dot计划修正后的加速燃油流量开始二次修正的门槛值,w
f,lim
表示n
‑
dot计划得到的加速燃油流量极限值,h表示第二次修正的修正函数。
[0095]
下面,将本公开所述两种控制计划融合控制与单独采用n
‑
dot控制计划和换算燃油流量控制计划控制的加速过程进行对比,以检验本公开所述方法的特点,具体过程如下:
[0096]
假定发动机在飞行包线内的状态连续变化,通过在飞行包线的马赫数和海拔高度范围内随机生成1500组工作点,令发动机依次飞行到相应工作点重复从15度油门杆快推到65度油门杆全程加速,记录观察加速过程是否超过失速边界,其中仿真生成的工作点如图2所示。仿真结果显示三种加速控制方式均能在这些工作点的加速过程中不触碰失速边界,基本可以认为它们具有适应全包线范围的工作能力,两种控制计划融合控制方式和n
‑
dot控制计划单独控制方式的平均加速时间为4.4s,换算燃油流量控制计划的平均加速时间4.6s,其中融合控制和换算燃油控制计划不同包线点加速时间的分布如图3所示,可以看到无明显差异。图3中,δt表示两种控制计划融合控制节省的加速时间,等于换算燃油控制计划加速时间减去前者的加速时间。
[0097]
当发动机保持功率提取80kw,燃油计量误差
‑
2.5%,引气2.5%,压气机和涡轮效率衰退为出厂的99%,压气机流量能力也衰退为出厂的99%这样一组扰动工作状态时,再仿真计算1500组飞行包线内的结果表明n
‑
dot控制计划控制出现了8.7%的工作点越过了失速边界,越过失速边界的点主要集中在空中左边界,如图4所示。而两种控制计划融合控制并未出现这种情况,其平均加速时间为5.3s,换算燃油流量控制计划的平均加速时间为6.3s,两者加速时间分布如图5所示,根据jssg
‑
2007 b的标准要求,包线内全程加速时间不超过12秒,无工作扰动时如图3最大加速时间均不超过12s,而该扰动条件下,融合控制最大加速时间约为12s,换算燃油加速时间为15.5s,说明小扰动情况下融合控制仍能满足加速时间的要求。因此相同工作条件下两种控制计划融合控制的方式在飞行包线内整体上优于单一控制计划的加速控制方式。
[0098]
进一步的,本公开还通过仿真对两种控制计划融合控制与单独采用n
‑
dot控制计
划和换算燃油流量控制计划控制的鲁棒程度进行对比说明,具体过程如下:
[0099]
通过加入一定程度的引气、功率提取、气压传感器误差和燃油计量误差的扰动,来观察三种不同加速控制方式下该发动机模型的加速情况:假设这台发动机在从地面慢车加速到n
2r
=0.93的稳态过程中存在功率提取500kw,引出2%的空气流量,气体压力传感器和燃油计量装置分别存在
‑
4%和
‑
6%的误差,这些扰动均从快推油门杆开始加速时就注入发动机,传感器和燃油计量误差为阶跃信号,空气流量单步最大变化量限制为1%,功率提取单步变化量超过14kw后对变化量进行惩罚限制,如图6所示为注入功率提取大小随时间变化曲线。
[0100]
通过仿真计算可以发现单独采用n
‑
dot控制计划控制的加速过程刚开始加速就突破了压气机的失速边界,如图7所示。而采用换算燃油流量控制计划控制的加速过程由于传感器和执行机构计量误差的影响达不到实际的加速限制线,并且提供的加速燃油流量甚至小于维持稳态运行所需的燃油流量,使得转子转速减速下掉,如图8的转速响应曲线所示。上述两种控制计划在该工作条件下都不能完成正常加速,而本文所使用的两种控制计划融合控制的方法却仍然可以安全地完成加速过程,如图9所示为其控制加速过程的高压转子转速响应曲线,最终加速到了目标转速。由此可见,三种控制方式可以实现安全加速的受扰范围存在明显差异。
[0101]
如果控制其它工作条件不变,仅改变加速过程中功率提取的大小时,三种控制方式能够提取的功率范围如图10所示,n
‑
dot控制计划单独控制加速过程超过196kw功率提取将越过压气机的失速边界;换算燃油流量控制计划控制的加速过程功率提取超过430kw将面临转速下掉的问题;而对于两种控制计划的融合方法进行控制的结果是超过569kw才会转速下掉,表明它在确保加速安全的同时,也一定程度上抵偿了测量误差的影响,使加速时间延长的幅度尽可能小。如图11所示为三种加速控制方式在不同传感器或燃油计量误差及不同引气量时加速控制过程中可提取功率的最大值,可以发现两种控制计划融合控制的方式可提取功率范围在较小误差及引气异常情况下总是最广,换言之相同功率提取及引气量下可忍受的传感器及燃油计量误差最大,所以两种控制计划融合控制的方式鲁棒性最好,抗扰动能力最强。如图12的深色区域所示为两种控制计划融合控制方式功率提取能力优于n
‑
dot的传感器或燃油计量误差和引气量的空间范围,它们近似成线性边界,可以看到以正常工作条件为中心的小误差和小引气量范围下前者具有确定的优势。
[0102]
更进一步的,本公开将两种控制计划融合控制与单独采用n
‑
dot控制计划和换算燃油流量控制计划控制加速过程中的喘振裕度进行了对比,具体过程如下:
[0103]
通过随机抽取1000种扰动工作条件来验证三种控制方式相同情况下加速过程的优劣。假设除功率提取、引气、传感器和燃油计量误差外,还考虑发动机性能衰退的影响,如表1所示为上述各扰动的验证取值范围,且假设各项工作扰动是满足均匀分布,即发动机存在异常的条件概率空间内。通过生成相应范围内的随机数作为涡扇发动机的一组加速工作条件,使发动机分别经过三种控制方式进行加速对比,发动机在不同包线点功率提取能力不同,因此便于对比验证,加速过程均是从地面慢车加速到中间状态的全程加速。
[0104]
表1
[0105][0106]
仿真验证记录了三种控制计划加速过程中的最小喘振裕度,如图13(a)所示为1000组工作条件下的加速过程最小喘振裕度,其中,图13(b)为图13(a)的局部放大图,可以看到存在不同恶劣工作条件下,n
‑
dot控制计划控制加速过程的喘振裕度整体下降,两种控制计划融合控制的方式的喘振裕度仍然在设计的加速限制线附近,其中上面的虚线是原定的加速限制线,下面是失速边界。经对1000种工作条件进行统计可知:n
‑
dot控制计划控制的加速过程越过压气机失速边界的有66.8%,融合控制方式越过失速边界线的为0,说明后者有效避免了喘振发生的可能。如图14所示为两种控制方式下喘振裕度的统计直方图,其中n
‑
dot控制计划仅保留了仍在稳定工作区内完成加速的部分,可以看到n
‑
dot控制计划整体已经向不稳定工作区域方向靠近,较广的分布范围显示其更易受功率提取的扰动影响;而两种控制计划融合控制方式喘振裕度绝大部分仍然在设计的加速限制线附近,它比n
‑
dot控制计划更能保障安全性。如图15(a)、图15(b)所示为1000组中剔除所有转速下掉情况后,换算燃油流量控制计划对两种控制计划融合控制的加速时间差,与换算燃油流量控制计划相比,两种控制计划融合后的加速时间总体要比换算燃油流量计划少。经统计,采用换算燃油流量控制计划的加速过程发生转速下掉的占9.8%,而两种计划融合控制方式仅占1.6%,又由于后者无一例越过失速边界,表明后者可以有效避免传感器测量误差导致的转速下掉,同时又允许了过大功率提取时正常的悬挂和转速下掉,进而防止了喘振发生的可能。如图16所示为相同工作条件下换算燃油流量控制计划控制加速过程的加速时间与两种计划融合控制方式的时间差分布,后者几乎所有工作条件下的加速时间均优于换算燃油流量控制计划,平均节省时间约1.5s,最大可节省约21s,表明两种计划融合控制的方式可以削弱由传感器误差导致的加速时间延长,对加速能力急剧下掉的极端情况具有足够的包容性。
[0107]
以上结合具体实施例描述了本公开的基本原理,但是,需要指出的是,在本公开中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本公开的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

