1.本发明涉及对飞行器的双涡轮机的健康状态的监测,更具体地,通过对涡轮机中的振动水平的监测来实现对飞行器的双涡轮机的健康状态的监测。并且本发明更具体地涉及对用于此目的的振动传感器的监测。
背景技术:
2.涡轮机的健康状态通常由各种传感器来监测。其中,振动传感器是不可缺少的,因为振动传感器可以快速的检测到零件的损坏、间隙的增大以及任何其他能够危及涡轮机的故障。
3.双涡轮机沿气流的流通方向通常包括风扇、低压压缩机、高压压缩机、燃烧室、高压涡轮和低压涡轮。
4.用于监测涡轮机的振动的已知解决方案是在涡轮机的前部布置一个振动传感器,并且在涡轮机的后部布置另一个振动传感器。
5.以这种方式布置的这些传感器中的每一个传感器通过在低压速度和高压速度上控制的滤波器来执行对低压振动水平和高压振动水平(即,涡轮机的低压本体和高压本体)的监测。
6.为了确保对该振动水平的监测的可靠性,应该确保振动传感器是正确运行的,以立即提高涡轮机的异常振动水平。
7.已知的是,根据在起飞阶段和飞行后阶段期间检测到的振动水平的稳定性标准来监测振动传感器的健康状态,以执行该验证。
8.然而,这种检测原理具有限制,错误地宣布了假的振动传感器的故障。
9.‑
监测阶段不是最佳的,这些阶段中的振动水平通常低于传感器损坏的检测水平;
10.‑
在高温下的运行期间,由于涡轮机的速度高于在标称温度下的运行期间的速度,可以表明涡轮机处于监测阶段,并且在所提供的阶段期间没有记录水平,因为这些水平也可以低于传感器损坏的检测水平更是如此。
技术实现要素:
11.本发明的至少一个目的是定义振动传感器的故障的检测原理,其目的是确保只有那些实际故障的传感器被宣布为故障。
12.为了实现该目的,本发明涉及一种监测双涡轮机的至少两个振动传感器的健康状态的方法,该双涡轮机包括低压本体和高压本体,振动传感器位于涡轮机的前部,振动传感器位于涡轮机的后部,传感器中的每一个传感器被配置为在涡轮机的前部和后部测量低压本体和高压本体的振动,该方法在涡轮机的与传感器中的每一个传感器通信的处理单元(20)中执行,并且包括以下步骤:
13.‑
接收涡轮机的低压速度(nbp)和高压速度(nhp),并且当所述速度同时在预定范
围内时;
14.‑
接收由每个传感器记录的低压本体和高压本体的前部振动水平和后部振动水平;
15.‑
确定在预定接收周期内接收的低压本体和高压本体的振动水平的平均值;
16.‑
将在预定阈值处确定的低压本体和高压本体的振动水平的平均值进行比较来确定所述至少第一振动传感器和第二振动传感器的健康状态。
17.有利地,本发明通过以下特征单独采用或以特征的可能技术组合中的任何一个来完成。
18.在接收步骤期间,该方法包括低压速度和高压速度的验证步骤,该方法包括:如果速度不是同时在预定范围内,则由处理单元中断振动水平的接收。
19.所确定的平均值是针对多个接收值确定的低压本体和高压本体的振动水平的接收值的平均值,该平均值对应于预定接收周期,该平均值可以在接收期间被瞬时地确定。
20.在两个传感器监测方法中,一个传感器被配置为在涡轮机的前部测量低压本体和高压本体的振动水平,另一个传感器被配置为在涡轮机的后部测量低压本体和高压本体的振动水平,如果对于一个传感器,低压本体和高压本体的振动水平的平均值小于预定阈值,并且对于另一个传感器,低压本体和高压本体的振动水平的平均值大于预定阈值,则认为一个传感器的健康状态较差。
21.在四个传感器监测方法中,在涡轮机的前部的两个传感器被配置为在前部分别测量低压本体和高压本体的振动水平,在涡轮机的后部的两个传感器被配置为在后部分别测量低压本体和高压本体的振动水平,如果对于低压本体的振动水平的传感器,振动水平的平均值小于预定阈值,并且对于其它传感器,振动水平的平均值大于预定阈值,则认为低压本体的振动水平的传感器的健康状态较差,如果对于高压本体的振动水平的传感器,振动水平的平均值小于预定阈值,并且对于其它传感器,振动水平的平均值大于预定阈值,则认为高压本体的振动水平的传感器的健康状态较差。
22.该方法包括一旦传感器连续三次表现出相同的健康状态,则确认传感器的良好或较差健康状态。
23.例如,低压本体的预定振动阈值介于0.1cm/s到0.2cm/s之间,通常为0.16cm/s。
24.例如,高压本体的预定振动阈值介于0.05cm/s到0.15cm/s之间,通常为0.10cm/s。
25.低压速度的预定范围介于10500tr/min到13500tr/min之间,并且其中,高压速度的预定范围介于14500tr/min到17500tr/min之间。
26.本发明还涉及一种双涡轮机,该双涡轮机包括处理单元,该处理单元被配置为执行根据本发明的方法。
27.本发明具有许多优点。
28.故障的检测比通过已知解决方案的检测更可靠。
29.事实上,检测以更高的速度完成(因此更“强劲(vibrant)”),并且需要多次确认平均值的计算使得实际对传感器故障的监测更可靠。
30.因此,假的故障是有限的。
31.可以修复已被宣布有故障的传感器。
附图说明
32.通过以下是纯说明性和非限制性的并且必须结合附图考虑的描述,本发明的其他特征、目的和优点将显现,在附图中:
33.[图1]
[0034]
图1示意性地示出了双涡轮机,
[0035]
[图2]
[0036]
图2示出了用于执行根据本发明的方法的架构;
[0037]
[图3]
[0038]
图3示出了根据本发明的方法的步骤。
[0039]
在所有附图中,相似的元件具有相同的附图标记。
具体实施方式
[0040]
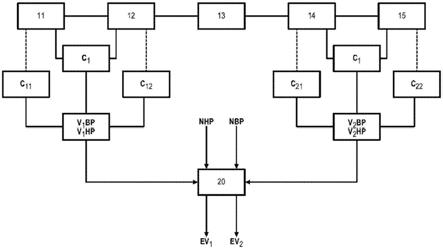
图1示出了飞行器的双流双涡轮机,该双流双涡轮机沿气流的方向从上游到下游(根据发动机的轴线aa)包括管道风扇1、主环形流动空间i和次级环形流动空间ii(次级管道),该主环形流动空间和次级环形流动空间由外部壳体2和内部轮毂3界定。在主管道i中,涡轮机包括低压压缩机11、高压压缩机12、燃烧室13、高压涡轮14和低压涡轮15。
[0041]
因此,涡轮机在前部和后部(沿气流的方向)包括低压本体和高压本体。
[0042]
如开始所述,振动传感器被布置在前部和后部,以测量低压本体和高压本体的振动。
[0043]
如图2示意性所示,根据一个实施例,传感器c1在前部测量低压本体和高压本体的振动v1bp、v1hp,以及传感器c2在后部测量低压本体和高压本体的振动v2bp、v2hp。
[0044]
根据该实施例,单个传感器被布置在后部,以及单个传感器被布置在前部,每个传感器同时测量低压本体和高压本体的振动。为了实现这一点,必须对接收到的振动执行滤波,以使得来自低压本体的振动可以从来自高压本体的振动中分离出来。
[0045]
作为变型,可以设置四个传感器,两个传感器被设置在前部,以及两个传感器被设置在后部。在该变型中,传感器c11在前部测量低压本体的振动v1bp,传感器c12在前部测量高压本体的振动v1hp,传感器c21在后部测量低压本体的振动v2bp,传感器c22在后部测量高压本体的振动v2hp。
[0046]
这种振动传感器例如包括加速度计。
[0047]
传感器可以被布置在涡轮机上的多个点处。例如,为了在前部测量低压本体的振动,传感器可以被布置在低压压缩机的区域中。为了在前部测量高压本体的振动,传感器可以被布置在高压压缩机的区域中。为了在后部测量高压本体的振动,传感器可以被布置在高压涡轮的区域中。为了在后部测量低压本体的振动,传感器可以被布置在低压涡轮的区域中。
[0048]
如在介绍中提到的,这些振动传感器需要被监测。这种监测通过以下关于图3描述的用于监测振动传感器的健康状态的方法在处理单元20中执行。
[0049]
对振动传感器的健康状态的监测是基于利用源自低压速度范围和高压速度范围内的传感器的振动测量值,振动水平与振动测量值相关)。
[0050]
作为优势,记录振动水平以用于在周期t内进行监测。该周期t必须足够高,以具有
足够高的振动水平的测量值的平均值(在集成传感器的情况下),并且因此高于故障传感器的检测阈值。事实上,在统计上,平均值的计算时间越长,计算出的平均最小值越高。该周期t还必须足够低,以使系统在检测范围内足够长,以确保在飞行期间至少进行3次平均值的计算。该周期优选地介于60s到120s之间,并且优选地等于90s。
[0051]
在方法开始时,计算步骤n在n=0处(步骤e0)被初始化,并且周期t=n.δt用振动水平的记录周期δt来计算(步骤e1)。
[0052]
在这些不同的初始化之后,处理单元20接收e2低压速度nbp和高压速度nhp,并且当这些速度同时在预定范围内时,处理单元20接收(步骤e3)源自待监测的振动传感器的振动水平v1bp、v2bp、v1hp、v2hp。
[0053]
优选地,低压速度nbp和高压速度nhp的范围如下:
[0054]
‑
nbp=[10500;13500]tr/min;
[0055]
‑
nhp=[14500;17500]tr/min。
[0056]
这种速度例如通过对发动机在不同速度下实际看到的振动水平的统计研究来确定。因此,根据相对于阈值的振动值来选择监测原理的速度和/或根据源自统计研究的速度的相关性来选择阈值。
[0057]
在两个传感器的情况下,一个传感器在前部,一个传感器在后部,每个传感器c1、c2获取两个振动水平:
[0058]
‑
在前部的传感器c1获取低压的振动水平v1bp和高压的振动水平v1hp;
[0059]
‑
在后部的传感器c2获取低压的振动水平v2bp和高压的振动水平v2hp。
[0060]
在四个传感器的情况下,两个传感器在前部,两个传感器在后部,每个传感器c11、c12、c21、c22获取一个振动水平:
[0061]
‑
在前部的传感器c11在前部获取低压本体的振动水平v1bp;
[0062]
‑
在前部的传感器c12获取高压本体的振动水平v1hp;
[0063]
‑
在后部的传感器c21获取低压本体的振动水平v2bp;
[0064]
‑
在后部的传感器c22获取高压本体的振动水平v2hp。
[0065]
根据接收到的值,处理单元20计算(步骤e4)每个振动水平的瞬时平均值如下:
[0066][0067]
其中,i={1,2)以及j={bp,hp}。
[0068]
在周期t内的每个步骤n处计算瞬时平均值,并且在每个计算步骤n处增加1(步骤e8)。当周期t完成时,平均值
[0069]
‑
由前部的一个或多个传感器测得的低压本体和高压本体的水平m1bp、m1hp;
[0070]
‑
由后部的一个或多个传感器测得低压本体和高压本体的水平的m2bp、m2hp;
[0071]
来获得。
[0072]
作为替代,一旦在总周期t内获取了振动水平的所有值,就可以计算平均值,这意味着这些值是逐步存储的。
[0073]
以补充的方式,为了确保低压速度和高压速度同时在预定范围内,在每次接收振动水平之前,处理单元20验证(步骤e2)低压速度和高压速度的值。如果不是这种情况,则处理单元20中断(int)(步骤e9)振动水平的接收以计算平均值。然而,一旦速度恢复到预定范
围,处理单元20就返回到其已经停止的地方。
[0074]
当振动水平的平均数对应于周期t=90s时(步骤e5),处理单元20确定(步骤e6)每个传感器的健康状态。
[0075]
将在振动阈值处的每个平均值m1bp、m1hp、m2bp、m2h进行比较来获得传感器的健康状态。
[0076]
低压阈值sbp通常介于0.1cm/s到0.2cm/s之间,优选地为0.16cm/s。
[0077]
高压阈值shp通常介于0.05cm/s到0.15cm/s之间,优选地为0.10cm/s。
[0078]
在此,这些不同的阈值源自统计研究。
[0079]
在两个传感器的情况下,如果对于一个传感器,低压本体和高压本体的振动水平的平均值分别小于阈值sbp、shp,并且对于另一个传感器,低压本体和高压本体的振动水平的平均值分别大于阈值sbp、shp,则认为一个传感器的健康状态esij较差。
[0080]
作为替代,在四个传感器的情况下,如果对于低压本体的振动水平的传感器,振动水平的平均值小于阈值sbp,并且对于其它传感器,低压本体的振动水平的平均值大于阈值sbp,则认为低压本体的振动水平的传感器的健康状态esij较差;如果对于高压本体的振动水平的传感器,高压本体的振动水平的平均值小于阈值shp,并且对于其它传感器,高压本体的振动水平的平均值大于阈值shp,则认为高压本体的振动水平的传感器的健康状态较差。
[0081]
根据以这种方式确定的健康状态,一旦传感器连续三次表现出相同的健康状态,处理单元20执行传感器的良好或较差健康状态的健康状态的确认(步骤e7)。
[0082]
因此,可以修复已被确认其健康状态较差的传感器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

