1.本实用新型涉及智能厨房技术领域,更具体地,涉及一种智能冰箱的防卡死的进菜盒组件。
背景技术:
2.理想的智能厨房是,用户只需要通过手机远程设定想要吃的菜品以及用餐时间,到家之后就可以吃到饭菜。智能厨房能够自动的按照人们炒菜的习惯设定食材的添加顺序、火候等。
3.其中,一个重要的环节为智能冰箱能够按照程序进行出菜,控制好出菜顺序、间隔时间、以及出菜重量,但是菜的种类各种各样,因此菜的形状、大小、软硬程度都不相同,在实际应用中容易出现进菜盒出菜卡住菜的现象。
4.因此,本实用新型提供一种智能冰箱的防卡死的进菜盒组件,能够实现各种食材均出菜顺畅,没有卡住菜的现象。
技术实现要素:
5.本实用新型的目的在于,提供一种智能冰箱的防卡死的进菜盒组件,能够实现各种食材均出菜顺畅,没有卡住菜的现象。
6.一种智能冰箱的防卡死的进菜盒组件,进菜盒组件设置在冰箱内部的前部,包括:多个进菜盒1,进菜盒1用于装不同种类的、干净的食材,进菜盒1按照行和列的方式均匀分布,进菜盒1包括:螺旋轴11、轴心定位座12、进菜盒上部13和进菜盒下部14,食材放置在进菜盒1内部,螺旋轴11设置在进菜盒下部14内部并向后延伸到进菜盒下部14的外部,轴心定位座12位于进菜盒1后端,控制螺旋轴11不偏倚,螺旋轴11通过旋转,将食材向后推出。
7.在一些实施方式中,进菜盒1有2
‑
10行、2
‑
10列,优选的,进菜盒1有4
‑
6行、4
‑
8列。
8.进一步的,进菜盒1分为放菜进菜盒2和放香辛葱蒜进菜盒3。
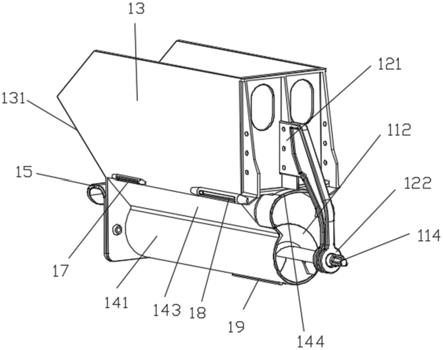
9.在一些实施方式中,进菜盒1还包括拉手板15、和防尘盖16,拉手板15设置在进菜盒下部14的前端,通过拉动拉手板15方便将进菜盒1拉出或者推进。
10.进一步的,螺旋轴11包括:螺旋轴前端111、螺旋叶112、杆体113、和螺旋轴后端114,轴心定位座12包括:固定部121、和空心圆环部122,固定部121与进菜盒上部13的后端固定,防尘盖16内设置有一个轴承,螺旋轴前端111与轴承连接,杆体113的尾端穿过空心圆环部122,空心圆环部122的直径稍大于杆体113的直径,因此,螺旋轴11能够旋转并且旋转时不易偏倚。
11.进一步的,螺旋叶112沿着杆体113螺旋设置,螺旋叶112上边沿的倒角为0.1
‑
0.5mm,优选的,螺旋叶112上边沿的倒角为0.1
‑
0.3mm,螺旋叶112上边沿倒角的设计使得出菜更顺畅,且不易划伤食材。
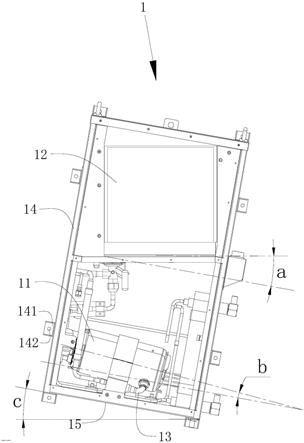
12.进一步的,进菜盒上部13的前端为向前凸出斜面131,另外三面垂直于水平面,向前凸出斜面131的倾斜角度a为30
°‑
50
°
,向前凸出斜面131的设计可以起到螺旋轴11旋转
时,防止食材溢出的作用。
13.进一步的,进菜盒下部14包括:底部141、左侧部142、右侧部143、和后部144,底部141为圆弧形、并且圆弧形的右边高于左边,左侧部142向左倾斜,左侧部142向左倾斜的角度b为10
‑
30℃,右侧部143向右倾斜,右侧部143与螺旋叶112的切线之间的角度c>70
°
,优选的,右侧部143与螺旋叶112之间的角度c为75
°‑
100
°
,右侧部143与进菜盒上部13的右侧面之间的角度d为135
°‑
140
°
,螺旋叶112上边沿与后部144顶端的距离e为28
‑
45mm。
14.螺旋叶112倒角的设定、右侧部143与螺旋叶112之间的角度的设定、右侧部143与进菜盒上部13的右侧面之间的角度设定、以及螺旋叶112上边沿与后部144顶端的距离的设定,使得螺旋叶112旋转时,各种食材都能够向后顺畅出菜,不卡住菜。
15.在一些实施方式中,进菜盒1还包括称重卡条17、长卡条18、和定位卡条19,称重卡条17和长卡条18位于进菜盒上部13和进菜盒下部14侧面的结合处,称重卡条17用于承载重量落脚点,进菜盒1一端抬起后,由称重卡条17落点在卡槽内,使重量在称重卡条17上,长卡条18在卡槽内滑动,使进菜盒1在卡槽内前后滑动,定位卡条19位于进菜盒下部14的底部后端,起到定位的作用。
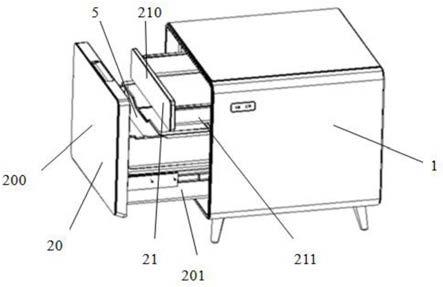
16.在一些实施方式中,每个进菜盒1还配置有定位锁扣4和移出位锁扣5,定位锁扣4用于将进菜盒1固定,将定位锁扣4向左拨动后,才能取出进菜盒1,进菜盒1推进时,定位锁扣4和移出位锁扣5自动回位。
17.在一些实施方式中,当准备出菜时,需要哪个进菜盒1出菜,智能冰箱的系统控制相应的推菜传动组件的单向气缸向前运动,使推菜传动组件的离合轴与螺旋轴后端114连接,离合轴带动螺旋轴11旋转,相应的进菜盒1开始出菜。
附图说明
18.图1为本技术的一种进菜盒组件的主视图。
19.图2为本技术的一种一行进菜盒的立体图。
20.图3为本技术的进菜盒的立体图。
21.图4为本技术的进菜盒的右视图。
22.图5为本技术的进菜盒的俯视图。
23.图6为本技术的进菜盒的后视图。
24.图7为本技术的螺旋轴的立体图及螺旋叶上边沿的倒角局部放大图。
25.图8为图5的a
‑
a剖面的剖视图。
26.主要元件符号说明:
27.进菜盒
‑
1、放菜进菜盒
‑
2、放香辛葱蒜进菜盒
‑
3、定位锁扣
‑
4、移出位锁扣
‑
5、螺旋轴
‑
11、轴心定位座
‑
12、进菜盒上部
‑
13、进菜盒下部
‑
14、拉手板
‑
15、防尘盖
‑
16、称重卡条
‑
17、长卡条
‑
18、定位卡条
‑
19、螺旋轴前端
‑
111、螺旋叶
‑
112、杆体
‑
113、螺旋轴后端
‑
114、固定部
‑
121、空心圆环部
‑
122、向前凸出斜面
‑
131、底部
‑
141、左侧部
‑
142、右侧部
‑
143、后部
‑
144。
具体实施方式
28.描述以下实施例以辅助对本技术的理解,实施例不是也不应当以任何方式解释为
限制本技术的保护范围。
29.在以下描述中,本领域的技术人员将认识到,在本论述的全文中,组件可描述为单独的功能单元(可包括子单元),但是本领域的技术人员将认识到,各种组件或其部分可划分成单独组件,或者可整合在一起(包括整合在单个的系统或组件内)。
30.同时,附图内的组件或系统之间的连接并不旨在限于直接连接。相反,在这些组件之间的数据可由中间组件修改、重格式化、或以其它方式改变。另外,可使用另外或更少的连接。还应注意,术语“联接”、“连接”、或“输入”“固定”应理解为包括直接连接、通过一个或多个中间媒介来进行的间接的连接或固定。
31.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“侧面”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时或惯常认知的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
32.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
33.实施例1:
34.一种智能冰箱的防卡死的进菜盒组件,如图1
‑
图8所示,进菜盒组件设置在冰箱内部的前部,包括:多个进菜盒1,进菜盒1用于装不同种类的、干净的食材,进菜盒1按照行和列的方式均匀分布,进菜盒1包括:螺旋轴11、轴心定位座12、进菜盒上部13和进菜盒下部14,食材放置在进菜盒1内部,螺旋轴11设置在进菜盒下部14内部并向后延伸到进菜盒下部14的外部,轴心定位座12位于进菜盒1后端,控制螺旋轴11不偏倚,螺旋轴11通过旋转,将食材向后推出。
35.进菜盒1有4行、6列,其中第一行有4个放菜进菜盒2和3个放香辛葱蒜进菜盒3。进菜盒1还包括拉手板15、和防尘盖16,拉手板15设置在进菜盒下部14的前端,通过拉动拉手板15方便将进菜盒1拉出或者推进。螺旋轴11包括:螺旋轴前端111、螺旋叶112、杆体113、和螺旋轴后端114,轴心定位座12包括:固定部121、和空心圆环部122,固定部121与进菜盒上部13的后端固定,螺旋轴前端111与防尘盖16连接,杆体113的尾端穿过空心圆环部122,空心圆环部122的直径稍大于杆体113的直径,因此,螺旋轴11能够旋转并且旋转时不易偏倚。螺旋叶112沿着杆体113螺旋设置,螺旋叶112上边沿的倒角为0.2mm,螺旋叶112上边沿倒角的设计使得出菜更顺畅,且不易划伤食材。进菜盒上部13的前端为向前凸出斜面131,另外三面垂直于水平面,向前凸出斜面131的倾斜角度a为45
°
,向前凸出斜面131的设计可以起到螺旋轴11旋转时,防止食材溢出的作用。进菜盒下部14包括:底部141、左侧部142、右侧部143、和后部144,底部141为圆弧形、并且圆弧形的右边高于左边,左侧部142向左倾斜,左侧部142向左倾斜的角度b为15℃,右侧部143向右倾斜,右侧部143与螺旋叶112的切线之间的角度c为90
°
,右侧部143与进菜盒上部13的右侧面之间的角度d为137
°
,螺旋叶112上边沿与后部144顶端的距离e为35mm。螺旋叶112倒角的设定、右侧部143与螺旋叶112之间的角度的设定、右侧部143与进菜盒上部13的右侧面之间的角度设定、以及螺旋叶112上边沿与后部
144顶端的距离的设定,使得螺旋叶112旋转时,各种食材都能够向后顺畅出菜,不卡住菜。
36.进菜盒1还包括称重卡条17、长卡条18、和定位卡条19,称重卡条17和长卡条18位于进菜盒上部13和进菜盒下部14侧面的结合处,称重卡条17用于承载重量落脚点,进菜盒1一端抬起后,由称重卡条17落点在卡槽内,使重量在称重卡条17上,长卡条18在卡槽内滑动,使进菜盒1在卡槽内前后滑动,定位卡条19位于进菜盒下部14的底部后端,起到定位的作用。每个进菜盒1还配置有定位锁扣4和移出位锁扣5,定位锁扣4用于将进菜盒1固定,将定位锁扣4向左拨动后,才能取出进菜盒1,进菜盒1推进时,定位锁扣4和移出位锁扣5自动回位。当准备出菜时,需要哪个进菜盒1出菜,智能冰箱的系统控制相应的推菜传动组件的单向气缸向前运动,使推菜传动组件的离合轴与螺旋轴后端114连接,离合轴带动螺旋轴11旋转,相应的进菜盒1开始出菜。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。