1.本实用新型涉及探月所用探测车技术领域,尤其涉及一种无人驾驶的探索车。
背景技术:
2.目前月球车主要存在以下问题和使用前景:
①
传统的履带、车轮式的运动机构对月球复杂地形的应对能力较弱,机械足式的运动机构运动效率又比较低。
②
在月球搭建月球基地的迫切需求。
③
仅靠人工根本无法完成对月球基地的搭建。
④
在月球搭建基地需要消耗大量的人物力资源。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种无人驾驶的探索车,其具有优越的移动能力。
4.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
5.设计一种无人驾驶的探索车,包括安装有多个探测器的车身、所述车身下方设有四个行走机构;所述行走机构包括第一支臂、第二支臂、第三支臂,所述第一支臂的一端通过连接件与车身铰接;所述第一支臂的另一端与第二支臂的下端铰接,所述第二支臂的上端与第三支臂靠近上端的中上部铰接,所述第三支臂的下端连接有驱动电机,驱动电机的输出轴上安装有车轮。
6.还包括与所述车身或连接件铰接的第一驱动缸,所述第一驱动缸的伸缩杆前端与第一支臂的中部铰接,且通过第一驱动缸的伸缩杆的伸缩可带动第一支臂的延伸端及与第一支臂连接的第二支臂、第三支臂向上或向下摆动。
7.还包括与所述第二支臂中部铰接的第二驱动缸,所述第二驱动缸的伸缩杆与第一支臂的中部连接,且通过第二驱动缸的伸缩杆的伸缩可带动所述第二支臂以与第一支臂连接的第一销轴带动第二支臂上端及与第二支臂上端连接的第三支臂在前后方向上摆动。
8.还包括与所述第二支臂中部铰接的第三驱动缸,所述第三驱动缸的伸缩杆与第三支臂的上端铰接,通过所述第三驱动缸的伸缩杆伸缩可带动所述第三支臂的下端及与之连接的车轮进行摆动。
9.所述车身上部设有开口,开口内的车身内设有一可升降的升降板,所述多个探测器安装于所述升降板上。
10.所述升降板通过升降机构安装于车身内,所述升降机构包括安装于升降板左右两侧边的四个升降齿轮,四个升降齿轮分别连接一个升降电机,通过所述升降电机可驱动所述升降齿轮旋转;所述车身内的左右两侧壁上固定安装有与所述四个升降齿轮一一对应的四个纵立齿带,四个升降齿轮与四个纵立齿带一一对应并啮合转动。
11.所述多个探测器包括全景摄像机、天线、可伸展的机械臂。
12.所述机械臂的前端安装有3d打印头。
13.所述车身的左右两侧壁外侧壁上分别安装有为所述3d打印头供料的储物罐。
14.所述车身开口左右两侧的顶部分别通过舵机铰接有太阳能电池板,两个太阳能电池板分别通过各自对应侧的舵机可翻转至车身顶部开口处并将开口封闭且又可通过自对应侧的舵机可向车外外侧展开至水平装置。
15.位于车身一侧的太阳能电池板为两个,且两个太阳能电池板通过舵机铰接并可进行折叠或展开。
16.所述车身前侧及后侧分别安装有探测摄像机。
17.所述第一驱动缸、第二驱动缸、第三驱动缸均为电动伸缩杆。
18.本实用新型的有益效果在于:
19.1)本设计采用车轮与机械腿结合的新型高效行走机构,四个车轮由四个独立电机控制,可以360
°
旋转变向,车轮与机械腿配合可以很好克服复杂多变的月球地形。
20.2)本设计将3d打印技术运用到月球基地的建地,不仅可以缩短生产周期,提高效率,极大地降低生产成本。可实现月球营地的全自动打印搭建,为宇航员提供了极大的便利。
21.3)本设计采用可折叠、可伸缩的多关节机械臂。在拥有较大的可触范围的同时又可以灵活调整角度,使得机械臂更加便捷。
22.4)本设计采用传感器、雷达、全景摄像机结合的探测设备。可为月球车行动提供方向视角,可以进行全方位拍照和摄像。
23.5)本设计采用可升降的设备平台,在月球车休眠时,相关设备仪器可收入车内从而很好地避免设备受到损坏。
附图说明
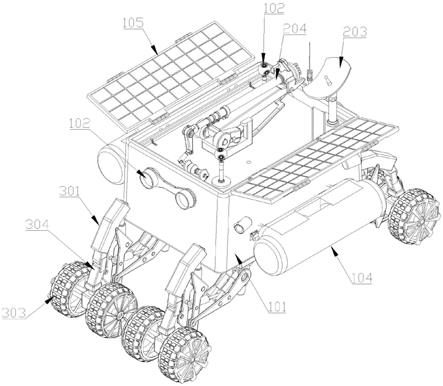
24.图1为本实用新型的主要结构示意图;
25.图2为本实用新型另一视角下的主要结构示意图;
26.图3为本实用新型另一视角下的主要结构示意图;
27.图4为本实用新型中除去车身外壳后的内部结构及行走机构的主要结构示意图;
28.图5为本实用新型中的升降机构主要结构示意图;
29.图6为本实用新型中的行走机构主要结构示意图。
具体实施方式
30.下面结合附图和实施例对本实用新型进一步说明:
31.实施例1:一种无人驾驶的探索车,参见图1至图6。
32.它包括安装有多个探测器的车身101、所述车身101下方设有四个相互独立的行走机构。
33.具体来说,所述行走机构包括第一支臂307、第二支臂311、第三支臂304,所述第一支臂307的一端通过连接件306与车身101铰接;所述第一支臂307的另一端与第二支臂311的下端通过第一销轴313铰接,所述第二支臂311的上端与第三支臂304靠近上端的中上部通过第二销轴316铰接,所述第三支臂304的下端连接有驱动电机302,驱动电机302的输出轴上安装有车轮303,四个车轮通过四个驱动电机相对独立控制驱动。
34.进一步的,还包括与所述连接件306铰接的第一驱动缸309,所述第一驱动缸309的
伸缩杆前端与第一支臂的中部铰接,且通过第一驱动缸309的伸缩杆的伸缩可带动第一支臂307的延伸端及与第一支臂309连接的第二支臂311、第三支臂304向上或向下摆动。
35.进一步的,还包括与所述第二支臂311中部铰接的第二驱动缸308,所述第二驱动缸308的伸缩杆与第一支臂307的中部连接,且通过第二驱动缸308的伸缩杆的伸缩可带动所述第二支臂311以与第一支臂307连接的第一销轴313带动第二支臂上端及与第二支臂上端连接的第三支臂304在前后方向上摆动。
36.进一步的,还包括与所述第二支臂中部铰接的第三驱动缸314,所述第三驱动缸314的伸缩杆与第三支臂304的上端铰接,通过所述第三驱动缸314的伸缩杆伸缩可带动所述第三支臂304的下端及与之连接的车轮303进行摆动。
37.本设计中,上述所述第一驱动缸、第二驱动缸、第三驱动缸均为电动伸缩杆;通过上述行走机构的设计,当所述第一驱动缸、第二驱动缸、第三驱动缸的伸缩杆均保持不动时,通过上述四个驱动电机驱动车轮可实现行走、原地旋转、转弯等动作;而通过所述第一驱动缸、第二驱动缸、第三驱动缸的伸缩杆的动作可实现以车轮为足部进行机械式行走动作,此方式在地势不平整的崎岖地面进行行走,实现稳定的多地形移动。
38.进一步的,本设计中的所述车身101上部设有开口,开口内的车身内设有一可升降的升降板201,所述多个探测器安装于所述升降板201上,所述多个探测器包括全景摄像机202、天线203、可伸展的机械臂204(现有技术),所述机械臂的前端安装有3d打印头205,3d打印头205可进行3d打印作业,同时还在所述车身101的左右两侧壁外侧壁上分别安装有为所述3d打印头供料的储物罐104。
39.进一步的,本设计中所述升降板201通过升降机构安装于车身101内,具体来说,所述升降机构包括安装于升降板201左右两侧边的四个升降齿轮211,四个升降齿轮211分别连接一个升降电机,通过所述升降电机可驱动所述升降齿轮旋转,同时,所述车身内的左右两侧壁上固定安装有与所述四个升降齿轮一一对应的四个纵立齿带210,四个升降齿轮210与四个纵立齿带211一一对应并啮合转动,通过升降电机驱动升降齿轮旋转可促使升降齿轮旋转在纵立齿带上移动并带动升降板上下移动,通过升降板的移动在月球车休眠时,相关的探测器可收入车内从而很好地避免设备受到损坏,还在所述车身前侧及后侧分别安装有探测摄像机102。
40.进一步的,本设计还在所述车身101开口左右两侧的顶部分别通过舵机铰接有太阳能电池板105,两个太阳能电池板105分别通过各自对应侧的舵机106可翻转至车身顶部开口处并将开口封闭且又可通过自对应侧的舵机可向车外外侧展开至水平装置,同时,位于车身一侧的太阳能电池板105为两个,且两个太阳能电池板通过舵机106铰接并可进行折叠或展开。
41.本设计的无人驾驶的探索车具有如下优势:
42.1)本设计采用车轮与机械腿结合的新型高效行走机构,四个车轮由四个独立电机控制,可以360
°
旋转变向,车轮与机械腿配合可以很好克服复杂多变的月球地形。
43.2)本设计将3d打印技术运用到月球基地的建地,不仅可以缩短生产周期,提高效率,极大地降低生产成本。可实现月球营地的全自动打印搭建,为宇航员提供了极大的便利。
44.3)本设计采用可折叠、可伸缩的多关节机械臂。在拥有较大的可触范围的同时又
可以灵活调整角度,使得机械臂更加便捷。
45.4)本设计采用传感器、雷达、全景摄像机结合的探测设备。可为月球车行动提供方向视角,可以进行全方位拍照和摄像。
46.5)本设计采用可升降的设备平台,在月球车休眠时,相关设备仪器可收入车内从而很好地避免设备受到损坏。
47.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

