1.本发明涉及无人机技术领域,尤其涉及一种为无人机起飞提供助力的停机装置。
背景技术:
2.无人机具有成本低、生存能力强、机动性能好等优点,且随着无人机技术的发展,无人机在国内外的各行业各领域当中会起到越来越重要的作用,具有广阔的应用前景,目前,由于无人机的蓄电池的电容量有限,由此限制了无人机的作业时间,对无人机的蓄电池的电量耗费数据发现,在无人机的起飞过程中,会耗费大量的电能,那么如何降低在无人机的起飞过程中的耗电量以延长无人机的作业时间,是业内亟待解决的技术问题。
技术实现要素:
3.本发明所要解决的技术问题是针对现有技术的不足,提供了一种为无人机起飞提供助力的停机装置。
4.本发明的一种为无人机起飞提供助力的停机装置的技术方案如下:
5.包括芯片、第一升降式空心柱、停机平台和第一气泵,所述第一气泵的出气口连接所述第一升降式空心柱的进气口,所述第一升降式空心柱设置在所述停机平台的内部,且所述第一升降式空心柱的升降方向垂直于所述停机平台的停机面;
6.所述芯片用于:当停在所述停机面上的无人机起飞时,控制所述第一升降式空心柱进行上升,以使所述第一升降式空心柱的出风口靠近所述无人机的正下方至第一预设距离阈值内,并启动所述第一气泵以向所述第一升降式空心柱送风。
7.本发明的一种为无人机起飞提供助力的停机装置的有益效果如下:
8.当停在所述停机平台上的无人机起飞时,芯片控制第一升降式空心柱进行上升,使第一升降式空心柱的出风口靠近无人机的正下方,并启动第一气泵向第一升降式空心柱内送风,此时第一升降式空心柱的出气口的气流会向无人机提供向上的推力,降低在无人机的起飞过程中的耗电量,达到延长无人机的作业时间的目的,实用性强。
9.在上述方案的基础上,本发明的一种为无人机起飞提供助力的停机装置还可以做如下改进。
10.进一步,所述第一气泵的出气口处设有用于调节气流大小的控制阀,所述芯片向所述第一升降式空心柱送风的过程包括:
11.按照预设频率获取无人机的所有旋翼的总升力,并根据所述总升力和所述无人机的重力之间的差值,利用所述控制阀调整所述第一升降式空心柱的出风口的气流大小。
12.进一步,还包括设有多个出气口的第二气泵,所述停机平台的内部还布设多个第二升降式空心柱,所述气泵的每个出气口与每个第二升降式空心柱一一对应连接,所述气泵的每个出气口处均设有自动阀门,每个第二升降式空心柱的升降方向均垂直于所述停机面,所述芯片还用于:
13.在所述无人机起飞时,控制所述无人机的每个旋翼正下方的第二升降式空心柱上
升,并使每个上升的第二升降式空心柱靠近相应旋翼的正下方至第二预设距离阈值内,并打开所述每个上升的第二升降式空心柱对应的自动阀门,以及启动所述第二气泵。
14.采用上述进一步方案的有益效果是:控制无人机每个旋翼的正下方的第二升降式空心柱的出气口的气流向每个旋翼提供向上的推力,能有效防止无人机在起飞过程中发生大幅度倾斜,甚至发生倾倒的问题,提高无人机在起飞过程中的稳定性。
15.进一步,所述停机平台上设有蓄电池和用于向所述无人机充电的无线充电装置,所述无线充电装置和所述蓄电池之间还连接一个自动插接组件,所述芯片还用于:通过所述自动插接组件控制所述无线充电装置和所述蓄电池之间的连接或分离。
16.采用上述进一步方案的有益效果是:当无人机需要充电时,通过自动插接组件自动连接无线充电装置和蓄电池,以通过无线充电装置实现对无人机的充电;当无人机充满电时,通过自动插接组件自动分离无线充电装置和蓄电池,停止充电,从而实现对无人机的智能化的充电管理。
17.进一步,所述芯片还用于:当所述无人机的所有旋翼的总升力达到预设升力阈值时,关闭所述第一气泵。
18.进一步,所述停机平台的边缘处还设有支架,所述支架的另一端通过翻转装置连接遮挡板;
19.所述芯片还用于:通过所述翻转装置控制所述遮挡板遮挡或露出所述停机平台。
20.采用上述进一步方案的有益效果是:在雨雪天气时,通过遮挡板能有效为停机平台遮挡雨雪,且当无人机降落在停机平台上后,同时为停机平台和无人机遮挡雨雪。
21.进一步,所述遮挡板的至少一面设有太阳能板,所述太阳能板连接所述蓄电池。
22.采用上述进一步方案的有益效果是:通过在遮挡板上设置太阳能板,通过太阳能板向蓄电池充电,以便于通过蓄电池向无人机充电,进一步提高实用性。
23.进一步,所述停机平台上还设有用于固定所述无人机的固定装置。
24.采用上述进一步方案的有益效果是:当无人机降落在停机平台上后,通过固定装置对无人机进行固定,防止在有风的情况下,将无人机吹倒,发生损伤。
25.进一步,所述停机平台上还设有用于使所述无人机降落对位的预设标识。
26.采用上述进一步方案的有益效果是:便于无人机搭载的pos定位定向系统对预设标识,时无人机能够更精准地降落在停机平台上。
附图说明
27.图1为本发明实施例的一种为无人机起飞提供助力的停机装置的结构示意图之一;
28.图2为图1中的一种为无人机起飞提供助力的停机装置的第一升降式空心柱升高的结构示意图;
29.图3为本发明实施例的一种为无人机起飞提供助力的停机装置的结构示意图之二;
30.图4为图3的一种为无人机起飞提供助力的停机装置的第二升降式空心柱升高的结构示意图;
31.图5为本发明实施例的一种为无人机起飞提供助力的停机装置的结构示意图之
三;
具体实施方式
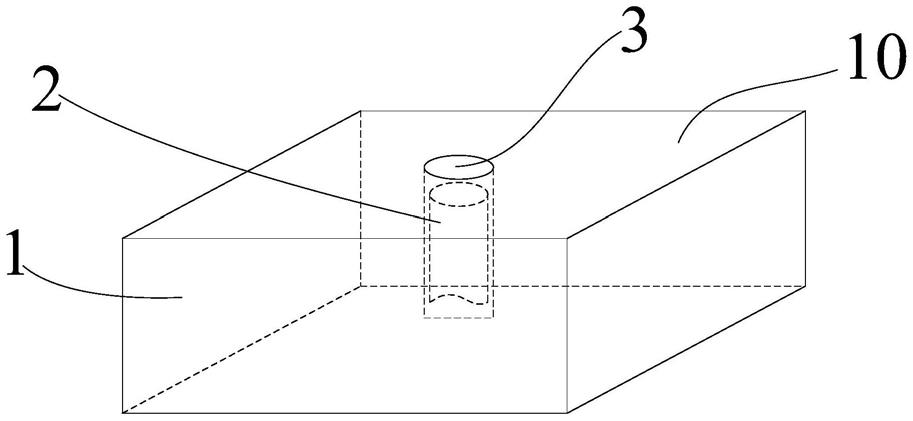
32.如图1和图2所示,本发明实施例的一种为无人机起飞提供助力的停机装置,包括芯片、第一升降式空心柱2、停机平台1和第一气泵,所述第一气泵的出气口连接所述第一升降式空心柱2的进气口,所述第一升降式空心柱2设置在所述停机平台1的内部,且所述第一升降式空心柱2的升降方向垂直于所述停机平台1的停机面10;
33.所述芯片用于:当停在所述停机面10上的无人机起飞时,控制所述第一升降式空心柱2进行上升,以使所述第一升降式空心柱2的出风口靠近所述无人机的正下方至第一预设距离阈值内,并启动所述第一气泵以向所述第一升降式空心柱2送风。
34.其中,实现第一升降式空心柱2升降的具体方式为:
35.1)在停机平台1上开设与第一升降式空心柱2适配的第一空腔3,在第一空腔3的底部设置液压伸缩杆,液压伸缩杆的伸缩端连接所述第一升降式空心柱2,芯片通过控制液压伸缩杆的伸缩,以实现第一升降式空心柱2的升降;
36.2)在停机平台1上开设与第一升降式空心柱2适配的第一空腔3,在第一空腔3的底部设置能伸缩的气压杆,气压杆的伸缩端连接所述第一升降式空心柱2,芯片通过控制气压杆的伸缩,以实现第一升降式空心柱2的升降;
37.其中,第一空腔3的开设位置可在停机平台1的正中间,也可根据实际情况在停机平台1的其它位置开设第一空腔3,芯片、第一气泵也可根据实际情况设置在停机平台1的内部或外部;可通过软气管等实现第一气泵的出气口和所述第一升降式空心柱2的进气口之间的连接。
38.可在第一升降式空心柱2的出气口处设置距离传感器,距离传感器用于实时采集第一升降式空心柱2的出风口与无人机之间的距离,并将采集到的距离实时发送至芯片,当芯片判定距离达到第一预设距离阈值时,则停止第一升降式空心柱2的升高,第一预设距离阈值可为2cm或3cm等,可根据实际情况进行设置。
39.其中,第一升降式空心柱2的开口大小可根据流体力学中的空气动力学的知识可进行确定,在此不做赘述。
40.当停在所述停机平台1上的无人机起飞时,芯片控制第一升降式空心柱2进行上升,如图2所示,使第一升降式空心柱2的出风口靠近无人机的正下方,并启动第一气泵向第一升降式空心柱2内送风,此时第一升降式空心柱2的出气口的气流会向无人机提供向上的推力,降低在无人机的起飞过程中的耗电量,达到延长无人机的作业时间的目的,实用性强。
41.较优地,在上述技术方案中,所述第一气泵的出气口处设有用于调节气流大小的控制阀,所述芯片向所述第一升降式空心柱2送风的过程包括:
42.按照预设频率获取无人机的所有旋翼的总升力,并根据所述总升力和所述无人机的重力之间的差值,利用所述控制阀调整所述第一升降式空心柱2的出风口的气流大小。
43.其中,取所述无人机的每个旋翼的升力的具体实现方式为:
44.1)在每个旋翼的下方设置压力传感器,如精确度为
±
0.05%fs、
±
0.025%fs等,当旋翼在转动时,会产生向下的作用力,通过高精度压力传感器能精确得到每个旋翼的升
力;
45.2)使用aers
‑
midwest公司所研制的轻型压力传感器,监控流过无人机的旋翼的气流,计算出每个旋翼的升力。
46.当得到每个旋翼的升力后,即可得到无人机的所有旋翼的总升力;那么,
47.假如第一时刻采集到的总升力为g/2时,g表示无人机的重力,此时,总升力和所述无人机的重力之间的差值为g/2,那么根据流体力学中的空气动力学的知识,并利用第一升降式空心柱2的出风口的开口大小等知识计算第一升降式空心柱2的出风口的气流大小,并根据计算出的气流大小,调节控制阀的开口大小,以使第一升降式空心柱2的出风口的气流所产生的推力大小与g/2相当,以更好地为无人机的起飞进行助力。
48.较优地,如图3和图4所示,在上述技术方案中,还包括设有多个出气口的第二气泵,所述停机平台1的内部还布设多个第二升降式空心柱4,所述气泵的每个出气口与每个第二升降式空心柱4一一对应连接,所述气泵的每个出气口处均设有自动阀门,每个第二升降式空心柱4的升降方向均垂直于所述停机面10,所述芯片还用于:
49.在所述无人机起飞时,控制所述无人机的每个旋翼正下方的第二升降式空心柱4上升,并使每个上升的第二升降式空心柱4靠近相应旋翼的正下方至第二预设距离阈值内,并打开所述每个上升的第二升降式空心柱4对应的自动阀门,以及启动所述第二气泵。
50.其中,实现第二升降式空心柱4升降的具体方式为:
51.1)在停机平台1上开设与第二升降式空心柱4适配的第二空腔5,在第二空腔5的底部设置液压伸缩杆,液压伸缩杆的伸缩端连接所述第二升降式空心柱4,芯片通过控制液压伸缩杆的伸缩,以实现第二升降式空心柱4的升降;
52.2)在停机平台1上开设与第二升降式空心柱4适配的第二空腔5,在第二空腔5的底部设置能伸缩的气压杆,气压杆的伸缩端连接所述第一升降式空心柱2,芯片通过控制气压杆的伸缩,以实现第二升降式空心柱4的升降;
53.其中,第二空腔5的布设方式可为阵列布设的方式或环形的布设方式,具体地:
54.1)阵列布设的方式:例如,在停机平台1上,每排设置8个第二升降式空心柱4,每行设置10个第二升降式空心柱4,此时,停机平台1上共设置8
×
10=80个第二升降式空心柱4,事实上,由于还需要在停机平台1上设置第一升降式空心柱2,实际设置的第二升降式空心柱4的数量要少于80个;
55.2)环形的布设方式,例如,以第一升降式空心柱2为圆心,在距离该圆心10cm的圆上等间隔布设一圈第二升降式空心柱4,在距离该圆心20cm的圆上等间隔再布设一圈第二升降式空心柱4;
56.其中,可采用如下方式避免第二空腔5的开口较大所述导致无人机降落不稳的问题,具体地:
57.1)减小第二空腔5的开口:在设置第二空腔5的开口时,使第二空腔5的开口小于无人机的落地脚,此时无人机的落地脚不会卡在第二空腔5内,提高无人机降落的安全性;
58.2)减小第二升降式空心柱4与相应第二空腔5之间的间隙,并减小第二升降式空心柱4的出气口的大小,使第二升降式空心柱4的出气口小于无人机的落地脚,此时无人机的落地脚不会卡在第二升降式空心柱4的出气口内,提高无人机降落的安全性;
59.3)在第二空腔5的开口上设置适配盖板,盖板与停机平台1之间设有第一翻转装
置,当无人机降落时,芯片通过第一翻转装置控制盖板遮挡第二空腔5的开口,此时,停机面10为平面,不会影响无人机的降落,当需要升高第二升降式空心柱4时,芯片通过第一翻转装置控制盖板露出第二空腔5的开口,便于升高第二升降式空心柱4,如图4所示。
60.第一翻转装置可采用市面上现有的能够自动控制进行翻盖的装置,如通过控制液压杆实现自动翻盖的装置、如通过控制齿轮实现自动翻盖的装置、如通过电磁铁实现自动翻盖的装置等等,在此不做赘述。
61.第二气泵也可根据实际情况设置在停机平台1的内部或外部;可通过软气管等实现第二气泵的每个出气口与相应第二升降式空心柱4的进气口之间的连接。
62.可在每个第二升降式空心柱4的出气口处设置距离传感器,距离传感器用于实时采集每个第二升降式空心柱4的出风口与无人机之间的距离,并将采集到的距离实时发送至芯片,当芯片判定距离达到第二预设距离阈值时,则停止第二升降式空心柱4的升高,第二预设距离阈值可为2cm或3cm等,可根据实际情况进行设置。
63.其中,当无人机降落后,通过三维扫描装置如手持式三维扫描仪等进行扫描,得到无人机和停机平台1对应的三维模型,根据三维模型确定每个旋翼正下方的第二升降式空心柱4,也可通过图像对比的方式确定每个旋翼正下方的第二升降式空心柱4,具体地:当无人机降落后,通过无人机上摄像头拍摄的正下方的图像,与预先拍摄的正下方的图像进行对比,然后确定出每个旋翼正下方的第二升降式空心柱4,也可人为确定每个每个旋翼正下方的第二升降式空心柱4。
64.当确定每个旋翼正下方的第二升降式空心柱4后,控制无人机每个旋翼的正下方的第二升降式空心柱4的出气口的气流向每个旋翼提供向上的推力,能有效防止无人机在起飞过程中发生大幅度倾斜,甚至发生倾倒的问题,提高无人机在起飞过程中的稳定性。
65.较优地,在上述技术方案中,所述停机平台1上设有蓄电池和用于向所述无人机充电的无线充电装置,所述无线充电装置和所述蓄电池之间还连接一个自动插接组件,所述芯片还用于:通过所述自动插接组件控制所述无线充电装置和所述蓄电池之间的连接或分离。
66.其中,自动插接组件可利用市面上现有的自动插接组件,例如,申请号为“cn201620380960.x”公开的自动插接充电装置等,那么:
67.当无人机需要充电时,通过自动插接组件自动连接无线充电装置和蓄电池,以通过无线充电装置实现对无人机的充电;当无人机充满电时,通过自动插接组件自动分离无线充电装置和蓄电池,停止充电,从而实现对无人机的智能化的充电管理。
68.较优地,在上述技术方案中,所述芯片还用于:当所述无人机的所有旋翼的总升力达到预设升力阈值时,关闭所述第一气泵。预设升力阈值可根据实际情况设置。
69.较优地,如图5所示,在上述技术方案中,所述停机平台1的边缘处还设有支架6,所述支架6的另一端通过翻转装置连接遮挡板7;
70.所述芯片还用于:通过所述翻转装置控制所述遮挡板7遮挡或露出所述停机平台1。
71.其中,翻转装置的具体解释可参考上述第一翻转装置,在此不做赘述。
72.支架6的结构可为一个直杆或多个直杆组合形成的立体结构等,不做具体限定,停机平台1与支架6之间通过螺纹固定方式连接,或焊接固定方式连接,所述支架6的另一端通
过翻转装置连接遮挡板7,那么:
73.在雨雪天气时,通过遮挡板7能有效为停机平台1遮挡雨雪,而且,当无人机降落时,控制遮挡板7露出所述停机平台1,以便于无人机降落在停机平台1的停机面10上,然后控制遮挡板7遮挡所述停机平台1,在雨雪天气时,同时为停机平台1和无人机遮挡雨雪;当无人机降落时,控制遮挡板7露出所述停机平台1,以便于无人机起飞。
74.较优地,在上述技术方案中,所述遮挡板7的至少一面设有太阳能板,所述太阳能板连接所述蓄电池。
75.通过在遮挡板7上设置太阳能板,通过太阳能板向蓄电池充电,以便于通过蓄电池向无人机充电,进一步提高实用性。
76.其中,可在太阳能板上预设电流输出端,通过电源线连接电流输出端和蓄电池,向蓄电池进行充电,当无人机降落在本技术的无人机停机装置上后,再通过无线充电装置或充电线向无人机进行充电,其中,假如蓄电池的输出电压与无人机的充电电压不符合时,可增加变压器,假如蓄电池的输出电流为直流,而无人机需交流充电时,可增加逆变器等等。
77.较优地,在上述技术方案中,所述停机平台1上还设有用于固定所述无人机的固定装置,固定装置具体如下结构:
78.1)在停机平台1的停机面10上嵌入电磁铁,在无人机的起落架上通过螺纹固定方式或焊接方式固定有铁片,通过磁铁与铁片之间的吸引力将无人机固定在停机平台1上;
79.2)选用型号为jj003的推拉门磁吸或手机支架6磁吸等;
80.当无人机降落在停机平台1上后,通过固定装置对无人机进行固定,防止在有风的情况下,将无人机吹倒,发生损伤。
81.较优地,在上述技术方案中,所述停机平台1上还设有用于使所述无人机降落对位的预设标识。预设标识为图案标识和/或多个光源,以便于无人机搭载的pos定位定向系统对团案标记进行识别,然后调整无人机自身的姿态,更便于无人机能精准地按照预定的姿态落在停机平台1上,更加智能化。
82.在本发明中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
83.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
84.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

