1.本发明涉及空间伸展技术领域,特别是指一种变形过程类电磁波正交保持的层叠式弹性空间伸展臂。
背景技术:
2.在整个宇航项目成本中,发射成本占据主要部分,而发射成本和被运载物的体积和质量密切相关。通常来说,被运载物的体积和质量与其发射成本是成正比的,体积和质量越大,需要越多的燃料提供动力,相应的发射成本越高。然而,为了保证宇航项目达到其设计要求,被宇航器材工作时的结构大小往往难以压缩。因此,可以在保证被运载物在发射时的体积收纳,同时工作时可以伸展至其工作状态大小的伸展机构便十分重要。
3.目前传统空间伸展机构按结构形式主要分为:薄壁管伸展臂、套筒式伸展臂、盘绕式伸展臂、铰接桁架式伸展臂、充气式伸展臂、张力集成体系等,而上述结构都存在一定的缺点。薄壁管式、套筒式与铰接桁架式伸展臂伸展时需要电机驱动,额外增加耗能与结构体积和质量,且套筒式伸展臂伸展比由于其结构限制,伸展比不高,而铰接桁架式伸展臂由于其铰接结构较多,展开后的精度较低。薄壁管式与盘绕式伸展臂展开的过程较不稳定,展开状态下的强度不高易受干扰。充气式伸展臂则需要额外携带气罐等设备,张力集成体系只能展开为特定结构,通用性不高。
4.本发明可以通过自身压缩后储存的弹性势能实现结构的纵向稳定伸展,不需要额外的驱动结构,有效地减少了传统空间伸展机构中所使用的资源,减少了机构质量。同时结构内部的“羽毛”组织可以保证伸展结构在展开状态时保持有足够的刚度与强度,抗干扰能力较强,同时由于其整体结构为弹性结构,受干扰后的自动矫正能力与精度也较高,可以有效地克服传统空间伸展机构存在的不足。
技术实现要素:
5.本发明要解决的技术问题是提供一种变形过程类电磁波正交保持的层叠式弹性空间伸展臂。
6.该伸展臂沿压缩方向由多个单层结构层叠而成,其中,单层结构由多个胞元结构组合而成;胞元结构包括平板和曲板,曲板位于两层平板中间,曲板包括羽毛结构和双向相切弧形板结构,双向相切弧形板结构中间设置羽毛结构,羽毛结构平行与平板,伸展臂的压缩与展开的过程视作多个胞元结构同时压缩与展开的过程。
7.其中,曲板按横向分为两侧的双向相切弧形板结构以及中间的羽毛结构。
8.双向相切弧形板结构为上下对称的弧形板结构,一侧弧形板的形状由两段相切的圆弧组成,弧形板的两侧分别与平板以及羽毛结构相切,双向相切弧形板结构能够被纵向压力压缩为平板。
9.羽毛结构包括中间的轴向平板,以及连接轴向平板与两侧双向相切弧形板结构的横向细梁,横向细梁沿轴向阵列排布,相互之间具有大于羽毛轴向宽度的间隙,保证弯曲时
横向羽毛之间不会发生碰撞;在伸展状态下,横向细梁可以阻碍双向相切弧形板结构变形,增强结构强度;压缩伸展臂时,轴向拉伸轴向平板,使横向细梁发生弯曲,继而纵向压缩伸展结构;压缩过程中,双向相切弧形板结构与羽毛结构的形状类似于电磁波的电波与磁波,保持弯曲且相互正交的形式。
10.单层结构在满足胞元结构功能性的前提下,由两个以上的胞元结构以多种组合方式组成,包括横向排布与周向排布但不局限于这两种组合方式。
11.伸展臂的层与层之间可以有多种布置形式,伸展臂单层之间偏转角度范围为0
‑
90
°
。
12.本发明的上述技术方案的有益效果如下:
13.上述方案中,层叠式弹性空间伸展臂具有轻量化、低耗能和高稳定性等优点,在空间伸展任务中,使用自身的压缩所储存的弹性势能驱动机构伸展,有效地减少了传统的空间伸展机构中所消耗的资源,减少了机构质量。此外,由于结构中并不存在铰接等机械活动结构,使得本发明在展开状态下拥有更高的精度。同时本发明由于其特殊结构,相比传统的弹性空间伸展机构,如薄壁管式与盘绕式伸展臂,展开状态下的稳定性更强。
附图说明
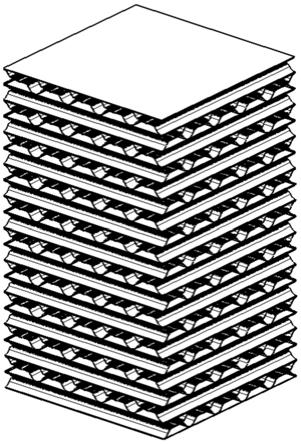
14.图1为本发明装置的结构示意图;
15.图2为本发明整体结构中的某单层结构示意图;
16.图3为本发明单层结构的单个胞元结构示意图;
17.图4为本发明胞元结构的纵向截面图;
18.图5为本发明胞元结构压缩过程中的结构示意图,其中,(a)为三维示意图,(b)为俯视图;
19.图6为本发明同胞元组织不同布置形式的伸展结构,其中,(a)为整体结构示意图,(b)为单个胞元结构示意图。
20.其中:1
‑
平板,2
‑
曲板,3
‑
羽毛结构,4
‑
双向相切弧形板结构,5
‑
横向细梁,6
‑
轴向平板。
具体实施方式
21.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
22.本发明提供一种变形过程类电磁波正交保持的层叠式弹性空间伸展臂。
23.如图1所示,该伸展臂沿压缩方向由多个单层结构层叠而成,其中,单层结构由多个胞元结构组合而成;胞元结构包括平板1和曲板2,曲板2位于两层平板1中间,曲板2包括羽毛结构3和双向相切弧形板结构4,双向相切弧形板结构4中间设置羽毛结构3,羽毛结构3平行于平板1,伸展臂的压缩与展开的过程视作多个胞元结构同时压缩与展开的过程。
24.如图2、图3所示,胞元结构包括中间的曲板2结构以及包裹曲板2结构的平板1,曲板2结构按横向分为两侧的双向相切弧形板结构4以及中间的羽毛结构3。
25.双向相切弧形板结构4为上下对称的弧形板结构,一侧弧形板的形状由两段相切的圆弧组成,弧形板的两侧分别与平板1以及羽毛结构3相切,可被纵向压力压缩为平板1。
26.如图4所示,羽毛结构3包括中间的轴向平板6,以及连接轴向平板6与两侧双向相切弧形板结构4的横向细梁5,横向细梁5沿轴向阵列排布,相互之间具有一定间隙,保证弯曲时横向羽毛之间不会发生碰撞;在伸展状态下,横向细梁5可以阻碍双向相切弧形板结构4变形,增强结构强度;压缩伸展臂时,轴向拉伸轴向平板6,使横向细梁5发生弯曲,继而纵向压缩伸展结构;压缩过程中,双向相切弧形板结构4与“羽毛”结构3的形状类似于电磁波的电波与磁波,保持弯曲且相互正交的形式。
27.单层结构在满足胞元结构功能性的前提下,由任意数量的胞元结构以多种组合方式组成,包括横向排布与周向排布但不局限于这两种组合方式。
28.整体结构的层与层之间可以有多种布置形式,层与层之间偏转各种角度均在设计范围内。
29.下面结合具体实施例予以说明。
30.实施例1
31.伸展臂沿压缩方向由一定结构堆叠而成,具体可以视为曲板结构2与平板1相互交叉排布。如图2所示,为某单层结构示意图,单层结构包括中间的曲板结构2以及包裹曲板结构的平板1,其可以视为多个胞元组合而成,单个胞元的结构如图3所示,整体结构的压缩与展开的过程可以视作多个胞元同时压缩与展开的结果。在满足胞元功能性的前提下,其整体结构可以有多种布置形式,如图1与图6便展示了其中两种布置形式的伸展结构。两种结构都是由同一种胞元组成,但布置形式不同,如图1所示,结构每层由5个胞元横向排布,相邻层之间相互垂直,如图6所示,每层由3个胞元周向排布,相邻层之间偏转60
°
。由于整体结构由胞元纵向堆叠,当其每层结构的胞元都实现纵向压缩与伸展时,整体结构也会随之压缩和伸展。
32.本发明提供的一种变形过程类电磁波正交保持的层叠式弹性空间伸展臂能够实现在发射之前的地面装载阶段实现伸展臂的压缩收纳,以及在空间将结构展开至工作状态。由于本发明的双向相切弧形板结构4的压缩变形需要横向伸展,而弧形板结构4的一侧与“平板”1相连,一侧与横向细梁5相连,倘若发生横向伸展需要平板1发生拉伸,或者横向细梁5全部失稳,这两种情况都需要较大的作用力,保证了该结构展开状态下的结构拥有较高的刚度与强度,为实现压缩收纳的顺利进行,压缩过程需要分步进行。所以该伸展臂主要工作过程包括地面压缩的羽毛结构3拉伸,平板1压缩两个阶段,以及空间工作位置的展开释放阶段共三个阶段,每个阶段都可以视作胞元结构的变形造成整体结构的变形,具体实施方式如下:
33.1)“羽毛”拉伸阶段:因此使用牵引装置固定轴向平板6的一端,并进行拉伸,使得轴向平板6两侧的横向细梁5发生弯曲,此时的横向细梁5与双向相切弧形板结构4都呈弯曲状,且两者弯曲平面保持正交,与电磁波的电波与磁波的形式较为接近。当轴向平板6拉伸有一定距离时,进行下一阶段,具体结构如图5所示;
34.2)平板压缩阶段:由于横向细梁5在上一阶段时都已经发生弯曲,无法约束双向相切弧形板结构4的变形。此时对平板1施加纵向压缩力,弧形板结构4便可以压缩变形,同时横向挤压横向细梁5继续弯曲,直至将结构完全压缩收纳,并加以约束固定;
35.3)展开释放阶段:配备本机构的宇航设置运行至工作位置,需展开本机构进入工作状态时,便可以解除收纳的固定约束,本机构便会在自身的弹性力的作用下,恢复至其压
缩之前的状态。
36.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

