1.本发明涉及小型无人飞行器光电吊舱引导装置的使用,尤其是一种无人飞行器半环形光电吊舱引导装置的引导方法。
背景技术:
2.目前,无人飞行器通过光电引导吊舱飞行的方向,现有引导吊舱的结构设计,大多数是基于两轴两框架支撑的稳定平,由于无人飞行器大多数为小型化,平台方位和俯仰采用力矩电机直接驱动或齿轮减速驱动,力矩电机直接驱动需要较大力矩的电机,光电系统体积重量大,占有无人飞行器的载重、空间;原有的无人飞行器光电引导吊舱的齿轮减速驱动存在传动精度较低,从而导致飞行距离较近,飞行成本较高,影响无人飞行器光电系统的性能和载重空间的提升;鉴于上述的诸多原因,现提出一种无人飞行器半环形光电吊舱引导装置的引导方法。
技术实现要素:
3.本发明的目的是为了克服无人飞行器大多数为小型化,原有的无人飞行器光电引导吊舱的齿轮减速驱动存在传动精度较低,体积、重量较大,从而导致飞行距离较近,飞行成本较高,影响无人飞行器光电系统的性能和载重空间的提升;现通过合理的设计,提供一种无人飞行器半环形光电吊舱引导装置的引导方法;本发明采用三轴驱动调整无人飞行器的光电稳定平台,调整灵活、精确,调整角度的范围较大,减少了减速机的使用,结构简单、紧凑、体积、重量较小,占用无人飞行器的空间和重量较小,能够提升无人飞行器的性能和部件的安装,满足未来无人飞行器载光电引导头结构小型化、轻量化的发展需求。
4.本发明为了实现上述目的,采用如下技术方案,一种无人飞行器半环形光电吊舱引导装置的引导方法,所述的无人飞行器半环形光电吊舱引导装置,是由齿条支撑座、俯仰角旋转轴、倾斜角旋转轴、倾斜角电机、俯仰角电机、导槽、平台支撑架、旋转座、旋转平台、稳定平台、弧形齿条、内齿、齿滚、倾斜角弧形槽、平台座、齿条导轨、控制电路模块、控制中心模块、倾斜角控制模块、俯仰角控制模块、旋转平台执行模块构成;平台座的四个角分别预留安装孔,平台座上面一侧设置为凸台,凸台的底部预留为空腔,凸台上面设置旋转平台,旋转平台与平台座凸台的上面中心对应设置;旋转平台上面设置平台支撑架,平台支撑架设置为圆柱形的腔体,圆柱形腔体上面预留至少一个安装窗口,腔体的内壁一侧设置控制电路模块;平台支撑架下端设置为旋转座,平台支撑架上端中部纵向设置为倾斜角弧形槽,倾斜角弧形槽中部设置弧形齿条;倾斜角弧形槽上面对应弧形齿条的底部两侧对称设置一对齿条导轨,弧形齿条下面两侧对称预留一对导槽,一对导槽中对应设置一对齿条导轨;
5.弧形齿条下面的倾斜角弧形槽底部两端对称设置一对齿条支撑座,一对齿条支撑座上端之间设置一根齿滚,齿滚下面与倾斜角弧形槽上面之间预留间隙,间隙中设置为弧形齿条;弧形齿条的内弧面中部上面均布设置内齿,齿滚外面均布设置齿滚轮齿,齿滚轮齿
与内齿为咬合设置;
6.齿滚的轴向中心设置一根倾斜角旋转轴,倾斜角旋转轴两端分别设有轴头,一对齿条支撑座的上端对应预留一对轴孔,一对轴孔中设置倾斜角旋转轴两端的轴头,倾斜角旋转轴一端的轴头上设置倾斜角电机,倾斜角电机的外壳与一侧的齿条支撑座之间设有紧固螺栓为固定设置,倾斜角电机的转子与倾斜角旋转轴为固定设置;
7.弧形齿条两端中部之间设置稳定平台,稳定平台上面设置为平面,稳定平台上面中心设置为飞行导向中心,稳定平台下面设置为半球形面,稳定平台的中心与上面平行设置一根俯仰角旋转轴,一根俯仰角旋转轴两端分别预留轴头,弧形齿条两端对应预留一对俯仰角轴孔,一对俯仰角轴孔中设置俯仰角旋转轴的轴头,俯仰角旋转轴一端的轴头上设置俯仰角电机,俯仰角电机的外壳与弧形齿条一端的外侧之间设置紧固螺栓,俯仰角电机的转子与俯仰角旋转轴为固定设置;
8.控制电路模块上面的下方一侧设置为控制中心模块,控制中心模块上方分别设置倾斜角控制模块、俯仰角控制模块,控制中心模块一侧设置旋转平台执行模块,控制中心模块的执行端分别与倾斜角控制模块、俯仰角控制模块、旋转平台执行模块之间设置信号线路,倾斜角控制模块、俯仰角控制模块、旋转平台执行模块分别与电源之间设置电源电路,旋转平台执行模块与旋转平台之间设置为电性连接,俯仰角控制模块与俯仰角电机之间设置为电性连接,倾斜角控制模块与倾斜角电机之间设置为电性连接;
9.无人飞行器安装了半环形光电吊舱引导装置在飞行过程中,无人飞行器通过半环形光电吊舱引导装置的引导进行飞行,半环形光电吊舱引导装置通过控制中心模块进行俯仰角、倾斜角、旋转飞行姿态的信号接收,当控制中心模块接收到俯仰角信号时,控制中心模块通过信号线路指令俯仰角控制模块,俯仰角控制模块通过接收的指令控制电路控制俯仰角电机带动俯仰角旋转轴、稳定平台进行上仰或俯旋转。
10.当控制中心模块接收到倾斜角信号时,控制中心模块通过信号线路指令倾斜角控制模块,倾斜角控制模块通过接收的指令控制电路控制倾斜角电机带动倾斜角旋转轴运动,倾斜角旋转轴通过齿滚、内齿带动弧形齿条、稳定平台进行倾斜角旋转。
11.当控制中心模块接收到旋转信号时,控制中心模块通过信号线路指令旋转平台执行模块,旋转平台执行模块通过接收的指令控制电路控制旋转平台带动平台支撑架、稳定平台进行旋转;稳定平台分别通过倾斜角电机、俯仰角电机、旋转平台进行同步调整飞行导向。
12.有益效果:本发明采用三轴驱动调整无人飞行器的光电稳定平台,调整灵活、精确,调整角度的范围较大,减少了减速机的使用,结构简单、紧凑、体积、重量较小,占用无人飞行器的空间和重量较小,能够提升无人飞行器的性能和部件的安装,满足未来无人飞行器载光电引导头结构小型化、轻量化的发展需求。
附图说明
13.下面结合附图对本发明作进一步说明:
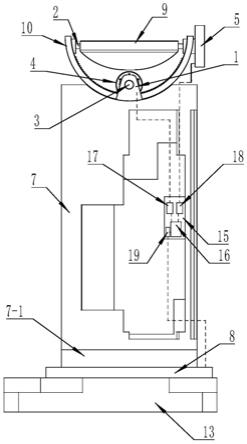
14.图1是总装结构示意图;
15.图2是图1的右视局部构示意图;
16.图3是图1的立体结构示意图;
17.图4是图3的局部结构示意图;
18.图5是图3的平台支撑架局部结构示意图;
19.图1、2、3、4、5中:齿条支撑座1、俯仰角旋转轴2、倾斜角旋转轴3、倾斜角电机4、俯仰角电机5、导槽6、平台支撑架7、旋转座7
‑
1、旋转平台8、稳定平台9、弧形齿条10、内齿10
‑
1、齿滚11、倾斜角弧形槽12、平台座13、齿条导轨14、控制电路模块15、控制中心模块16、倾斜角控制模块17、俯仰角控制模块18、旋转平台执行模块19。
具体实施方式
20.下面结合实施例与具体实施方式对本发明作进一步详细说明:
21.实施例1
22.平台座13的四个角分别预留安装孔,平台座13上面一侧设置为凸台,凸台的底部预留为空腔,凸台上面设置旋转平台8,旋转平台8与平台座13凸台的上面中心对应设置;旋转平台8上面设置平台支撑架7,平台支撑架7设置为圆柱形的腔体,圆柱形腔体上面预留至少一个安装窗口,腔体的内壁一侧设置控制电路模块15;平台支撑架7下端设置为旋转座7
‑
1,平台支撑架7上端中部纵向设置为倾斜角弧形槽12,倾斜角弧形槽12中部设置弧形齿条10;倾斜角弧形槽12上面对应弧形齿条10的底部两侧对称设置一对齿条导轨14,弧形齿条10下面两侧对称预留一对导槽6,一对导槽6中对应设置一对齿条导轨14;
23.弧形齿条10下面的倾斜角弧形槽12底部两端对称设置一对齿条支撑座1,一对齿条支撑座1上端之间设置一根齿滚11,齿滚11下面与倾斜角弧形槽12上面之间预留间隙,间隙中设置为弧形齿条10;弧形齿条10的内弧面中部上面均布设置内齿10
‑
1,齿滚11外面均布设置齿滚轮齿,齿滚轮齿与内齿10
‑
1为咬合设置;
24.齿滚11的轴向中心设置一根倾斜角旋转轴3,倾斜角旋转轴3两端分别设有轴头,一对齿条支撑座1的上端对应预留一对轴孔,一对轴孔中设置倾斜角旋转轴3两端的轴头,倾斜角旋转轴3一端的轴头上设置倾斜角电机4,倾斜角电机4的外壳与一侧的齿条支撑座1之间设有紧固螺栓为固定设置,倾斜角电机4的转子与倾斜角旋转轴3为固定设置;
25.弧形齿条10两端中部之间设置稳定平台9,稳定平台9上面设置为平面,稳定平台9上面中心设置为飞行导向中心,稳定平台9下面设置为半球形面,稳定平台9的中心与上面平行设置一根俯仰角旋转轴2,一根俯仰角旋转轴2两端分别预留轴头,弧形齿条10两端对应预留一对俯仰角轴孔,一对俯仰角轴孔中设置俯仰角旋转轴2的轴头,俯仰角旋转轴2一端的轴头上设置俯仰角电机5,俯仰角电机5的外壳与弧形齿条10一端的外侧之间设置紧固螺栓,俯仰角电机5的转子与俯仰角旋转轴2为固定设置;
26.控制电路模块15上面的下方一侧设置为控制中心模块16,控制中心模块16上方分别设置倾斜角控制模块17、俯仰角控制模块18,控制中心模块16一侧设置旋转平台执行模块19,控制中心模块16的执行端分别与倾斜角控制模块17、俯仰角控制模块18、旋转平台执行模块19之间设置信号线路,倾斜角控制模块17、俯仰角控制模块18、旋转平台执行模块19分别与电源之间设置电源电路,旋转平台执行模块19与旋转平台8之间设置为电性连接,俯仰角控制模块18与俯仰角电机5之间设置为电性连接,倾斜角控制模块17与倾斜角电机4之间设置为电性连接;
27.无人飞行器安装了半环形光电吊舱引导装置在飞行过程中,无人飞行器通过半环
形光电吊舱引导装置的引导进行飞行,半环形光电吊舱引导装置通过控制中心模块16进行俯仰角、倾斜角、旋转飞行姿态的信号接收,当控制中心模块16接收到俯仰角信号时,控制中心模块16通过信号线路指令俯仰角控制模块18,俯仰角控制模块18通过接收的指令控制电路控制俯仰角电机5带动俯仰角旋转轴2、稳定平台9进行上仰或俯旋转。
28.实施例2
29.当控制中心模块16接收到倾斜角信号时,控制中心模块16通过信号线路指令倾斜角控制模块17,倾斜角控制模块17通过接收的指令控制电路控制倾斜角电机4带动倾斜角旋转轴3运动,倾斜角旋转轴3通过齿滚11、内齿10
‑
1带动弧形齿条10、稳定平台9进行倾斜角旋转。
30.实施例3
31.当控制中心模块16接收到旋转信号时,控制中心模块16通过信号线路指令旋转平台执行模块19,旋转平台执行模块19通过接收的指令控制电路控制旋转平台8带动平台支撑架7、稳定平台9进行旋转;稳定平台9分别通过倾斜角电机4、俯仰角电机5、旋转平台8进行同步调整飞行导向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

