1.本发明涉及仿生机器人技术领域,尤其是涉及一种具有图像传输功能的六自由度仿生机器海豚。
背景技术:
2.海豚相比于鱼类,具有优良的游动性能。海豚采取背腹式游动,依靠尾部和尾鳍的上下摆动及鳍肢的配合,瞬时游速可超过11m/s,每小时可游动37至55km,游动效率高、扰动小。此外,海豚转弯灵活,能以0.15倍左右的体长为转弯半径进行机动运动,转弯速度高达450
°
/s。海豚的运动机动性高,能够自由跃出水面并在空中完成转体等复杂动作。海豚的优良游动性能使其成为仿生学的重要研究对象。
3.军事上,机器海豚可用于近海防御作战,其较大的体型能支持装载水雷、小型导弹、鱼雷等装备。民用上,机器海豚可用于水下勘探、水质检测、水下考古等,同时可以用于科技馆普及知识、高端智能玩具的开发等。因此,机器海豚在民用领域和海洋军事方面具有广阔的应用前景和巨大的潜在价值,但现有的机器海豚无法实现多种运动模式,也不具有交互功能。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种具有图像传输功能的六自由度仿生机器海豚,实现前进、转弯、上升、下潜与原地转向等多种运动模式,具有视觉图像传输功能和感知交互能力。
5.根据本发明实施例的具有图像传输功能的六自由度仿生机器海豚,具有海豚仿生学特性;所述仿生机器海豚自前向后依次包括:
6.头部,所述头部包括头部壳体、摄像头和头部舵机传动机构;所述摄像头安装在所述头部壳体上,用于拍摄水下图像并输出;所述头部舵机传动机构用于驱动所述头部壳体在所述仿生机器海豚的身体竖直对称面内转动,以实现所述仿生机器海豚的抬头和低头运动;
7.身体第一段,所述身体第一段包括第一段壳体、第一段前隔板、第一段后隔板、胸鳍、电子器件模块、重心调节机构;所述第一段壳体的前端与所述头部壳体的后端密封连接;所述第一段前隔板和所述第一段后隔板分别对应地固定在所述第一段壳体的前端和后端;所述胸鳍有两个,两个所述胸鳍左右对称地设置在所述第一段壳体上,用于协助所述仿生机器海豚调整姿态;所述电子器件模块和所述重心调节机构均安装在所述第一段壳体内;所述重心调节机构用于改变所述仿生机器海豚的重心位置,以使所述仿生机器海豚作俯仰运动,从而实现上浮和下潜运动;
8.身体第二段,所述身体第二段包括第二段壳体和腰部偏航舵机传动机构;所述第二段壳体的前端与所述第一段壳体的后端密封连接;所述腰部偏航舵机传动机构用于驱动所述第二段壳体在水平面内自由转动,以实现所述仿生机器海豚的偏航转弯;
9.身体第三段,所述身体第三段包括第三段壳体和腰部俯仰舵机传动机构;所述第三段壳体的前端与所述第二段壳体的后端密封连接;所述腰部俯仰舵机传动机构用于驱动所述第三段壳体在所述仿生机器海豚的身体竖直对称面内摆动,以控制所述仿生机器海豚向前推进;
10.尾部,所述尾部包括尾部俯仰舵机传动机构和尾鳍,所述尾部俯仰传动舵机传动机构设置在所述第三段壳体和尾鳍上,用于驱动所述尾鳍在所述仿生机器海豚的身体竖直对称面内摆动,以控制所述仿生机器海豚向前推进;
11.所述电子器件模块用于分别控制所述摄像头、所述头部舵机传动机构、所述胸鳍、所述重心调节机构、所述腰部偏航舵机传动机构、所述腰部俯仰舵机传动机构以及所述尾部俯仰舵机传动机构的运行。
12.根据本发明实施例的具有图像传输功能的六自由度仿生机器海豚,通过头部舵机传动机构驱动头部壳体的转动,实现了仿生机器海豚的抬头和低头运动,同时也可用于辅助实现仿生机器海豚的上浮和下潜运动;通过身体第一段内的重心调节机构来调节仿生机器海豚的重心位置,实现了仿生机器海豚的上浮和下潜运动,身体第一段两侧的胸鳍可改变攻角来辅助调整运动姿态;通过身体第二段在水平面内摆动实现了偏航转弯功能;通过身体第三段的腰部俯仰舵机传动机构和尾部的尾部俯仰舵机传动机构在仿生机器海豚的身体竖直对称面内摆动,来拟合正弦波形,并且腰部俯仰舵机传动机构和尾部俯仰舵机传动机构之间存在一定的相位差,驱动仿生机器海豚前进并协助完成上浮和下潜运动;通过在头部壳体上设置摄像头和在身体第一段设置电子器件模块,实现了实时视觉图像传输。由此,本发明实施例的仿生机器海豚可以实现前进、转弯、上升、下潜与原地转向等多种运动模式,实现了稳定重复游动,且具有感知交互功能。
13.根据本发明的一个实施例,所述头部舵机传动机构设置在所述头部壳体和所述第一段前隔板之间,包括头部舵机固定架、头部舵机和头部舵机连接架,所述头部舵机固定架固定在所述头部壳体上,所述头部舵机固定在所述头部舵机固定架上,所述头部舵机连接架一端与所述头部舵机相连且另一端与所述第一段前隔板连接。
14.根据本发明的一个实施例,所述腰部偏航舵机传动机构设置在所述身体第一段后隔板和所述第二段壳体之间,包括腰部偏航舵机固定架、腰部偏航舵机和腰部偏航舵机连接架,所述腰部偏航舵机固定架固定在所述第二段壳体上,所述腰部偏航舵机固定在所述腰部偏航舵机固定架上,所述腰部偏航舵机连接架的一端与所述腰部偏航舵机相连且另一端与所述第一段后隔板连接。
15.根据本发明的一个实施例,所述重心调节机构包括电机、支撑架、丝杠和重物,其中,所述电机和所述支撑架前后间隔开地相对设置,所述丝杠的前端与所述电机相连,所述丝杠的后端可转动地支撑在所述支撑架上,所述重物设置在所述丝杠上,当所述电机正反转动时,带动所述丝杠同步正反转动,从而驱动所述重物沿所述丝杠前后移动。
16.根据本发明的一个实施例,两个所述胸鳍分别包括胸鳍舵机支架、胸鳍舵机、胸鳍连接件和胸鳍壳体,其中,所述胸鳍舵机支架固定在所述第一段壳体上,所述胸鳍舵机固定在所述胸鳍舵机支架上,所述胸鳍壳体通过所述胸鳍连接件连接在所述胸鳍舵机上;工作时,所述胸鳍舵机驱动所述胸鳍壳体作旋转运动,以实现所述胸鳍的攻角的改变,从而能够协助所述仿生机器海豚调整姿态。
17.根据本发明的一个实施例,所述身体第一段还包括背鳍;所述第一段壳体的背部固定有瓶口结构,所述瓶口结构用于所述电子器件模块的充电线和下载线向外伸展;所述背鳍上固定有瓶盖结构,所述瓶盖结构可拆卸地密封连接在所述瓶口结构上。
18.根据本发明的一个实施例,所述腰部俯仰舵机传动机构设置在所述第二段壳体和所述第三段壳体之间,包括腰部俯仰舵机固定架、腰部俯仰舵机和腰部俯仰舵机连接架,所述腰部俯仰舵机固定架固定在所述第二段壳体上,所述腰部俯仰舵机固定在所述腰部俯仰舵机固定架上,所述腰部俯仰舵机连接架的一端与所述腰部俯仰舵机相连且另一端与所述第三段壳体固定。
19.根据本发明的一个实施例,所述尾部俯仰舵机传动机构设置在所述第三段壳体和所述尾鳍之间,包括尾部俯仰舵机固定架、尾部俯仰舵机和尾部俯仰舵机连接架,所述尾部俯仰舵机固定架固定在所述第三段壳体上,所述尾部俯仰舵机固定在所述尾部俯仰舵机固定架上,所述尾部俯仰舵机连接架的一端与所述尾部俯仰舵机相连且另一端与所述尾鳍固定。
20.根据本发明的一个实施例,所述胸鳍和尾鳍采用光敏树脂8000。
21.根据本发明的一个实施例,所述电子器件模块包括底板、防水盒和电源组件,所述底板固定在所述第一段壳体的内底部上,所述防水盒固定在所述底板上,所述防水盒内装有电子元件,所述电源组件固定在所述防水盒的外壁上。
22.根据本发明进一步的实施例,所述电子元件包括arduino uno3微处理器和树莓派;所述arduino uno3微处理器用于控制所述头部舵机传动机构、所述胸鳍、重心调节机构、所述腰部偏航舵机传动机构、所述腰部俯仰舵机传动机构以及所述尾部俯仰舵机传动机构的运行;所述树莓派与摄像头相连,以实现视频的捕获和传输。
23.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
24.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
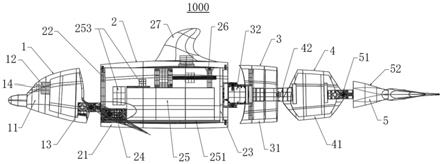
25.图1为本发明具有图像传输功能的六自由度仿生机器海豚的结构示意图;
26.图2为本发明具有图像传输功能的六自由度仿生机器海豚的头部示意图;
27.图3为本发明具有图像传输功能的六自由度仿生机器海豚的身体第一段示意图;
28.图4为本发明具有图像传输功能的六自由度仿生机器海豚的身体第二段示意图;
29.图5为本发明具有图像传输功能的六自由度仿生机器海豚的身体第三段示意图;
30.图6为本发明具有图像传输功能的六自由度仿生机器海豚的尾部示意图;
31.图7为本发明具有图像传输功能的六自由度仿生机器海豚的尾鳍示意图;
32.图8为本发明具有图像传输功能的六自由度仿生机器海豚的背鳍壳体示意图;
33.图9为本发明具有图像传输功能的六自由度仿生机器海豚的胸鳍示意图;
34.图10为本发明具有图像传输功能的六自由度仿生机器海豚的电子器件模块示意图。
35.附图标记:
36.仿生机器海豚1000
37.头部1
38.头部壳体11
ꢀꢀ
摄像头12
ꢀꢀ
头部舵机传动机构13
ꢀꢀ
头部舵机固定架131
39.头部舵机132
ꢀꢀ
头部舵机连接架133
ꢀꢀ
摄像头孔14
40.身体第一段2
41.第一段壳体21
ꢀꢀ
第一段前隔板22
ꢀꢀ
第一段后隔板23
ꢀꢀ
胸鳍24
42.胸鳍舵机支架241
ꢀꢀ
胸鳍舵机242
ꢀꢀ
胸鳍连接件243
ꢀꢀ
胸鳍壳体244
43.电子器件模块25
ꢀꢀ
底板251
ꢀꢀ
防水盒252
ꢀꢀ
电源组件253
ꢀꢀ
电池2531
44.稳压模块2532
45.重心调节机构26
ꢀꢀ
电机261
ꢀꢀ
支撑架262
ꢀꢀ
丝杠263
ꢀꢀ
重物264
46.背鳍27
ꢀꢀ
瓶口结构271
ꢀꢀ
瓶盖结构272
47.身体第二段3
48.第二段壳体31
ꢀꢀ
腰部偏航舵机传动机构32
ꢀꢀ
腰部偏航舵机固定架321
49.腰部偏航舵机322
ꢀꢀ
腰部偏航舵机连接架323
50.身体第三段4
51.第三段壳体41
ꢀꢀ
腰部俯仰舵机传动机构42
ꢀꢀ
腰部俯仰舵机固定架421
52.腰部俯仰舵机422
ꢀꢀ
腰部俯仰舵机连接架423
53.尾部5
54.尾部俯仰舵机传动机构51
ꢀꢀ
尾部俯仰舵机固定架511
ꢀꢀ
尾部俯仰舵机512
55.尾部俯仰舵机连接架513
ꢀꢀ
尾鳍52
具体实施方式
56.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
57.下面结合图1至图10来描述根据本发明实施例的具有图像传输功能的六自由度仿生机器海豚1000。
58.如图1所示,根据本发明实施例的具有图像传输功能的六自由度仿生机器海豚1000,具有海豚仿生学特性。本发明实施例中提到的海豚仿生学特性是指通过对宽吻点斑原海豚的细致观察建立模型,利用仿生学原理,对仿生机器海豚1000依照宽吻点斑原海豚的体型和骨骼特征进行仿生设计,获得的特性。仿生机器海豚1000具有流线型的外形,可以减小游动的阻力。
59.为了模拟宽吻点斑原海豚的游动动作,本发明实施例的仿生机器海豚1000具有多个部段,仿生机器海豚1000自前向后依次包括头部1、身体第一段2、身体第二段3、身体第三段4和尾部5。
60.如图1和图2所示,头部1包括头部壳体11、摄像头12和头部舵机传动机构13。摄像头12安装在头部壳体11上,用于拍摄水下图像并输出;具体地,头部壳体11上开设有摄像头孔14,摄像头12安装于摄像头孔14中,安装方便;摄像头12在头部壳体11上的所在位置可以是模拟宽吻点斑原海豚的眼睛的所在部位;摄像头12可以基于树莓派与开源库接入,实现
水下视觉图像传输的功能,从而实现感知交互功能。头部舵机传动机构13用于驱动头部壳体11在仿生机器海豚1000的身体竖直对称面内转动,以实现仿生机器海豚1000的抬头和低头运动,当仿生机器海豚1000抬头时,将有助于上浮,当仿生机器海豚1000低头时,将有助于下潜,也就是说,通过设置头部舵机传动机构13,实现仿生机器海豚1000的抬头和低头运动,进而有利于仿生机器海豚1000上升或者下潜。
61.如图1和图3所示,身体第一段2包括第一段壳体21、第一段前隔板22、第一段后隔板23、胸鳍24、电子器件模块25、重心调节机构26。第一段壳体21的前端与头部壳体11的后端密封连接,以实现密封防水功能;可选的,第一段壳体21的前端与头部壳体11的后端密封连接的方式可以采用软橡胶套套在头部壳体11与第一段壳体21之间,再用防水电工胶缠绕在接缝处并压实,最后再用硅橡胶填缝,从而可以起到很好的防水效果,避免水进入到仿生机器海豚1000的内部。第一段前隔板22和第一段后隔板23分别对应地固定在第一段壳体21的前端和后端;可选的,第一段前隔板22和第一段后隔板23均通过螺栓连接固定在第一段壳体21上,固定方式简单快速,固定效果好,且可以避免水进入第一段壳体21内,同时第一段前隔板22和第一段后隔板23也起到支撑安装其它功能部件的作用,例如第一段前隔板22可以与头部舵机传动机构13相连,第一段后隔板23可以与腰部偏航舵机传动机构32相连。如图1、图3和图9所示,胸鳍24有两个,两个胸鳍24左右对称地设置在第一段壳体21上,用于协助仿生机器海豚1000调整姿态;可以理解的是,胸鳍24可以改变自身的攻角而胸鳍24攻角的改变会产生使仿生机器海豚1000滚转的扭矩,进而可以协助仿生机器海豚1000调整姿态。如图3所示,电子器件模块25和重心调节机构26均安装在第一段壳体21内,也就是说,第一段壳体21用于容纳电子器件模块25和重心调节机构26,为了便于安装,在第一段壳体21内安装电子器件模块25和重心调节机构26时,首先将电子器件模块25和重心调节机构26组装或安装在一起后,再一起置入第一段壳体21内安装,从而避免了第一段壳体21内安装空间狭小,安装困难的问题。从图1可以看出,第一段壳体21为靠近中间位置的主壳体,体型较大,将电子器件模块25和重心调节机构26放置在中间的位置,有利于仿真机器海豚保持平衡和实现重心改变以变换运动状态。重心调节机构26用于改变仿生机器海豚1000的重心位置,以使仿生机器海豚1000作俯仰运动,从而实现上浮和下潜运动。可以理解的是,当重心位置靠后时,有利于仿生机器海豚1000上浮;当重心位置靠后时,有利于仿生机器海豚1000下潜。
62.如图1和图4所示,身体第二段3包括第二段壳体31和腰部偏航舵机传动机构32。第二段壳体31的前端与第一段壳体21的后端密封连接,以实现密封防水功能;可选的,第二段壳体31的前端与第一段壳体21的后端密封连接的方式可以采用软橡胶套套在第二段壳体31与第一段壳体21之间,再用防水电工胶缠绕在接缝处并压实,最后再用硅橡胶填缝,从而可以起到很好的防水效果,避免水进入到仿生机器海豚1000的内部。腰部偏航舵机传动机构32用于驱动第二段壳体31在水平面内自由转动,以实现仿生机器海豚1000的偏航转弯,也就是说,腰部偏航舵机传动机构32用于实现在行进过程中的左右转向功能。
63.如图1和图5所示,身体第三段4包括第三段壳体41和腰部俯仰舵机传动机构42。第三段壳体41的前端与第二段壳体31的后端密封连接,以实现密封防水功能;可选的,第三段壳体41的前端与第二段壳体31的后端密封连接的方式可以采用软橡胶套套在第三段壳体41与第二段壳体31之间,再用防水电工胶缠绕在接缝处并压实,最后再用硅橡胶填缝,从而
可以起到很好的防水效果,避免水进入到仿生机器海豚1000的内部。腰部俯仰舵机传动机构42用于驱动第三段壳体41在仿生机器海豚1000的身体竖直对称面内摆动,以控制仿生机器海豚1000向前推进,也就是说,第三段壳体41在腰部俯仰舵机传动机构42的驱动下,可以相对于第二段壳体31进行上下摆动,使仿生机器海豚1000可以向前推进。
64.如图6所示,尾部5包括尾部俯仰舵机传动机构51和尾鳍52。尾部5俯仰传动舵机传动机构设置在第三段壳体41和尾鳍52上,用于驱动尾鳍52在仿生机器海豚1000的身体竖直对称面内摆动,以控制仿生机器海豚1000向前推进;也就是说,尾部5在尾部俯仰舵机传动机构51的驱动下,可以进行上下摆动,使仿生机器海豚1000可以向前推进。
65.如图1所示,电子器件模块25用于分别控制摄像头12、头部舵机传动机构13、胸鳍24、重心调节机构26、腰部偏航舵机传动机构32、腰部俯仰舵机传动机构42以及尾部俯仰舵机传动机构51的运行,因此,仿生机器海豚1000可以实现视觉图像传输的功能,以及可控地完成抬头低头运动、调整姿态、转弯、前进、上升和下潜等游动过程。
66.根据本发明实施例的具有图像传输功能的六自由度仿生机器海豚1000,通过头部舵机传动机构13驱动头部壳体11的转动,实现了仿生机器海豚1000的抬头和低头运动,同时也可用于辅助实现仿生机器海豚1000的上浮和下潜运动;通过身体第一段2内的重心调节机构26来调节仿生机器海豚1000的重心位置,实现了仿生机器海豚1000的上浮和下潜运动,身体第一段2两侧的胸鳍24可改变攻角来辅助调整运动姿态;通过身体第二段3在水平面内摆动实现了偏航转弯功能;通过身体第三段4的腰部俯仰舵机传动机构42和尾部5的尾部俯仰舵机传动机构51在仿生机器海豚1000的身体竖直对称面内摆动,来拟合正弦波形,并且腰部俯仰舵机传动机构42和尾部俯仰舵机传动机构51之间存在一定的相位差,驱动仿生机器海豚1000前进并协助完成上浮和下潜运动;通过在头部壳体11上设置摄像头12和在身体第一段2设置电子器件模块25,实现了实时视觉图像传输。由此,本发明实施例的仿生机器海豚1000可以实现前进、转弯、上升、下潜与原地转向等多种运动模式,实现了稳定重复游动,且具有感知交互功能。
67.如图1至图2所示,根据本发明的一个实施例,头部舵机传动机构13设置在头部壳体11和第一段前隔板22之间,包括头部舵机固定架131、头部舵机132和头部舵机连接架133,头部舵机固定架131固定在头部壳体11上,头部舵机132固定在头部舵机固定架131上,头部舵机连接架133一端与头部舵机132相连且另一端与第一段前隔板22连接,例如,头部舵机连接架133的另一端可以粘贴在第一段前隔板22上,连接快速可靠。头部舵机132工作时,头部舵机连接架133可以传递头部舵机132的运动,使得头部壳体11会相对于身体第一段2上下转动,从而实现抬头和低头运动和辅助上浮和下潜运动。
68.如图1和图4所示,根据本发明的一个实施例,腰部偏航舵机传动机构32设置在第一段后隔板23和第二段壳体31之间,包括腰部偏航舵机固定架321、腰部偏航舵机322和腰部偏航舵机连接架323,腰部偏航舵机固定架321固定在第二段壳体31上,腰部偏航舵机322固定在腰部偏航舵机固定架321上,腰部偏航舵机连接架323的一端与腰部偏航舵机322相连且另一端与第一段后隔板23连接,例如,腰部偏航舵机连接架323的另一端可以粘贴在第一段后隔板23上,连接快速可靠。腰部偏航舵机322工作时,腰部偏航舵机连接架323可以传递腰部偏航舵机322的运动,使得第二段壳体31可以在水平面内左右转动,使仿生机器海豚1000可以实现偏航转弯功能。
69.如图1和图3所示,根据本发明的一个实施例,重心调节机构26包括电机261、支撑架262、丝杠263和重物264,其中,电机261和支撑架262前后间隔开地相对设置,丝杠263的前端与电机261相连,丝杠263的后端可转动地支撑在支撑架262上,重物264设置在丝杠263上,当电机261正反转动时,带动丝杠263同步正反转动,从而驱动重物264沿丝杠263前后移动。可以理解的是,当重物264向前移动时,仿生机器海豚1000的重心向头部1移动,有利于海豚的下潜;当重物264向后移动时,仿生机器海豚1000的重心向尾部5移动,有利于海豚的上浮。
70.如图1和图3所示,根据本发明的一个实施例,两个胸鳍24分别包括胸鳍舵机支架241、胸鳍舵机242、胸鳍连接件243和胸鳍壳体244,其中,胸鳍舵机支架241固定在第一段壳体21上,胸鳍舵机242固定在胸鳍舵机支架241上,胸鳍壳体244通过胸鳍连接件243连接在胸鳍舵机242上;工作时,胸鳍舵机242驱动胸鳍壳体244作旋转运动,以实现胸鳍24的攻角的改变,从而能够协助仿生机器海豚1000调整姿态。也就是说,胸鳍舵机支架241用于将胸鳍舵机242安装在第一段壳体21上,胸鳍舵机242可以带动胸鳍壳体244转动,以改变胸鳍24的攻角,而胸鳍24攻角的改变会产生使仿生机器海豚1000滚转的扭矩,可以协助仿生机器海豚1000调整姿态。
71.如图1、图3和图8所示,根据本发明的一个实施例,身体第一段2还包括背鳍27;第一段壳体21的背部固定有瓶口结构271,瓶口结构271用于电子器件模块25的充电线和下载线向外伸展;背鳍27上固定有瓶盖结构272,瓶盖结构272可拆卸地密封连接在瓶口结构271上。由此,当需要给电子器件模块25充电时或者进行数据下载时,打开背鳍27上的瓶盖结构272,通过充电线和下载线就能对仿生机器海豚1000的电子器件模块25进行充电和数据下载;当仿生机器海豚1000需要下水时,拧上背鳍27上的瓶盖结构272,瓶盖结构272就会起到良好的防水效果,同时依据仿生学设计的背鳍27也能增加仿生机器海豚1000游动的稳定性和效率。
72.如图1和图5所示,根据本发明的一个实施例,腰部俯仰舵机传动机构42设置在第二段壳体31和第三段壳体41之间,包括腰部俯仰舵机固定架421、腰部俯仰舵机422和腰部俯仰舵机连接架423,腰部俯仰舵机固定架421固定在第二段壳体31上,腰部俯仰舵机422固定在腰部俯仰舵机固定架421上,腰部俯仰舵机连接架423的一端与腰部俯仰舵机422相连且另一端与第三段壳体41固定。可选的,腰部俯仰舵机固定架421通过螺栓固定在第二段壳体31上,腰部俯仰舵机连接架423的另一端与第三段壳体41通过螺栓固定。腰部俯仰舵机422工作时,腰部俯仰舵机连接架423可以传递腰部俯仰舵机422的运动,使得第三段壳体41在仿生机器海豚1000的身体竖直对称面内摆动,实现仿生机器海豚1000向前推进。
73.如图1、图6和图7所示,根据本发明的一个实施例,尾部俯仰舵机传动机构51设置在第三段壳体41和尾鳍52之间,包括尾部俯仰舵机固定架511、尾部俯仰舵机512和尾部俯仰舵机连接架513,尾部俯仰舵机固定架511固定在第三段壳体41上,尾部俯仰舵机512固定在尾部俯仰舵机固定架511上,尾部俯仰舵机连接架513的一端与尾部俯仰舵机512相连且另一端与尾鳍52连接。尾部俯仰舵机512工作时,尾部俯仰舵机连接架513可以传递尾部俯仰舵机512的运动,使得尾鳍52在仿生机器海豚1000的身体竖直对称面内摆动,以控制仿生机器海豚1000向前推进。
74.上述腰部俯仰舵机传动机构42和尾部俯仰舵机传动机构51相配合,可以输出有一
定相位差的正弦波形,能较好地拟合宽吻点斑原海豚的卷腹运动,腰部俯仰舵机传动机构42和尾部俯仰舵机传动机构51对称摆动时,获得向前的推力;非对称摆动时,可以实现上浮和下潜。
75.根据本发明的一个实施例,仿生机器海豚1000通过配重方式保证仿生机器海豚1000在水中拥有稳定的运动姿态。
76.具体地,为了保证仿生机器海豚1000在水中拥有稳定的运动姿态,需要对仿生机器海豚1000进行合理的配重。通过对仿生机器海豚1000的头部1、身体第一段2、身体第二段3、身体第三段4、尾部5等各部段进行称重,并用solidworks计算各部段的体积,算出能使各部段重力和浮力大小相等的配重质量,这样可使仿生机器海豚1000恰能悬浮于水中,并且前后左右都能达到平衡;同时,为了保证仿生机器海豚1000在游动过程中的稳定性,需要将配重尽量加在仿生机器海豚1000下部,以降低仿生机器海豚1000的重心。在一些实施例中,可以使用铅条和铅粒进行配重。铅条形状规整,质量较大,可用于大范围的调节配重;铅粒颗粒较小,可装入自封袋中灵活改变仿生机器海豚1000质量和外部形状,可用于小范围的微调。大部分的配重置于仿生机器海豚1000的内部,从而保证仿生机器海豚1000的流线型外形,少部分配重置于仿生机器海豚1000外部,便于后期微调重心位置。每处配重都用电工胶、透明胶及细绳固定,防止配重滑动或脱落。
77.根据本发明的一个实施例,胸鳍壳体244和尾鳍52采用光敏树脂8000。这是由于胸鳍壳体244和尾鳍52在仿生机器海豚1000运动过程中,会承受较大的应力,而光敏树脂8000具有高的强度和韧性,因此可以提高仿生机器海豚1000的强度和推进效率。仿生机器海豚1000的其余壳体部分如头部壳体11、第一段壳体21、第二段壳体31、第三段壳体41等采用的是abs材料,abs材料是最普通的3d打印材料,成本低廉。
78.如图3所示,根据本发明的一个实施例,电子器件模块25包括底板251、防水盒252和电源组件253,底板251固定在第一段壳体21的内底部上,防水盒252固定在底板251上,防水盒252内装有电子元件,电源组件253固定在防水盒252的外壁上。可以理解的是,将电子元件设置在防水盒252内,有利于避免电子元件受潮腐蚀,保证电子元件的使用寿命。电子器件模块25在安装时,首先将装有电子元件的防水盒252固定(例如胶粘固定)在底板251上,再将底板251置于第一段壳体21内,将底板251的一端和已经固定在第一段壳体21上的第一段后隔板23相互抵紧,然后利用螺丝将底板251固定在第一段壳体21上,从而完成固定,这样的安装方式很好地避免了第一段壳体21内安装空间狭小安装困难的问题。需要说明的是,底板251起到支撑固定的作用,电源组件253包括电池2531和稳压模块2532,电池2531经过降压和稳压模块2532,同时电子元件进行供电。优选的,电池2531为3s锂电池,额定电压11.1v,容量为2500mah,降压后稳定地提供8.4v电压,等于上述所有单个舵机可以输入的最大电压,同时选用面包板作为供电板,将稳压模块2532接入面包板,这样可以为多路用电器提供电能。
79.如图10所示,根据本发明进一步的实施例,电子元件包括arduino uno3微处理器和树莓派;arduino uno3微处理器用于控制头部舵机传动机构13、胸鳍24、重心调节机构26、腰部偏航舵机传动机构32、腰部俯仰舵机传动机构42以及尾部俯仰舵机传动机构51的运行;树莓派与摄像头12相连,以实现视频的捕获和传输。也就是说,如图10所示,arduino uno3微处理器与仿生机器海豚1000的头部舵机132、腰部偏航舵机322、腰部俯仰舵机422、
尾部俯仰舵机512和胸鳍舵机242相连,用于控制它们转动的角度,摄像头12连接在树莓派上,用来进行图像的获取和传输。
80.需要说明的是,arduino uno3微处理器输出pwm信号实现对舵机的控制,arduino uno3微处理器具有六路pwm输出引脚,六路pwm输出引脚是用硬件的办法直接输出pwm信号,实际上任何一个数字io接口都能够通过软件方法输出pwm信号,arduino uno3微处理器有六个数字io接口,这样arduino uno3微处理器最多可以同时控制12个舵机。arduino uno3微处理器的vin接口输入8.4v电压为arduino uno3微处理器供电。arduino uno3微处理器接有usb转接线,可以利用外部计算机给arduino uno3微处理器编写和烧录程序;本发明arduino uno3微处理器使用的控制程序调用了手柄函数库〈ps2x_lib.h>舵机函数库〈servo.h〉和数学库〈math.h>函数的核心是按钮读取函数parse_ps2_button和舵机pwm值写入函数servo_pwm。另外,arduino uno3微处理器还连接有天线模块,天线模块用于从外部用于控制仿生机器海豚1000的手柄接收信号。arduino uno3微处理器不断地从外部用于控制仿生机器海豚1000的手柄接收信号并进行相应的运算处理,得到各个舵机的pwm值并将改pwm值写入各个舵机。
81.具体地,仿生机器海豚1000使用搭载摄像头12的树莓派来实现视频的捕获和传输。树莓派上存在配置好的opencv环境,且存储有可以调取摄像头12的小程序,使用时利用vncviewer,在外部笔记本电脑上远程登录树莓派,将图像实时传输到外部笔记本电脑上。另外,树莓派和arduino uno3微处理器通过usb接口相连,实现树莓派和arduino uno3微处理器的互相通讯,可以在外部笔记本电脑上远程登录树莓派,实现远程修改arduino uno3微处理器中的程序。
82.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
83.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

