1.本实用新型属于海洋航行器领域,具体地说是一种微小型水下滑翔机。
背景技术:
2.随着海洋科学的研究加深,水下滑翔机作为一种新型的无人水下航行器,其技术得到了快速发展。水下滑翔机是一种新兴的海洋观测平台,因其具有噪声小、体积小、质量轻,续航时间长等特点,得到了全世界范围内的广泛重视。水下滑翔机整体外形与鱼雷相似,通过调节自身浮力大小来驱动整机实现锯齿状的滑翔运动,通过搭载不同类型的传感器,以水下滑翔机单机或多机编队的形式,收集各种海洋信息,如海水温度、盐度、溶解氧以及海水中的叶绿素含量等信息。在海洋国防领域,由于其噪声小和隐蔽性强等特点,可以用来收集沿海国家海洋水文环境、声场环境等重要情报。开展水下滑翔机技术研究对于海洋资源开发以及海洋国防建设具有重大意义。目前,国内外现有水下滑翔机重量往往在60公斤以上,且成本相对较高,将现有滑翔机用于载机高速部署或者大规模集群作业仍然存在很大困难。
技术实现要素:
3.针对现有水下滑翔机重量体积较大、成本较高的问题,本实用新型目的在于提供一种微小型水下滑翔机。该微小型水下滑翔机体积重量小、低成本,可用于海洋环境观测。
4.本实用新型的目的是通过以下技术方案来实现的:
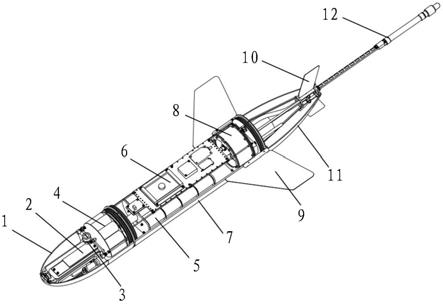
5.本实用新型包括艏部导流罩、艏部温盐深探测单元、艏部端盖、固定能量单元、微型姿态调节装置、电控单元、主耐压舱体、微型浮力调节装置、水平翼、垂直翼、艉部端盖、艉部导流罩及微型柔性天线,其中主耐压舱体的两端分别与艏部端盖及艉部端盖密封连接,所述固定能量单元安装于艏部端盖内,为所述水下滑翔机提供电能,该艏部端盖外连接有艏部导流罩,所述艏部导流罩中设有安装在艏部端盖上的艏部温盐深探测单元;所述微型姿态调节装置、电控单元及微型浮力调节装置分别安装于主耐压舱体内,所述艉部端盖外连接有艉部导流罩,所述微型浮力调节装置中的外油囊位于所述艉部端盖外部、且位于艉部导流罩内,与海水接触;所述主耐压舱体上安装有水平翼,所述垂直翼及微型柔性天线分别安装于艉部导流罩上;所述微型姿态调节装置中的动力源、微型浮力调节装置中的动力源、微型柔性天线及固定能量单元分别与电控单元相连。
6.其中:所述艏部温盐深探测单元包括深度探头、温盐深数据采集板、电导率探头及温度探头,该深度探头通过压紧件固定在艏部端盖的最前端,该深度探头的压力探测膜与水体相接触;所述电导率探头及温度探头分别固定在艏部端盖的边缘,且分别与水体相接触;所述温盐深数据采集板通过固定板安装于艏部端盖的内部。
7.所述微型浮力调节装置包括浮力电机密封壳、浮力驱动电机、内油囊活塞、滚动膜片、内油囊外壳、微型单柱塞单元、出油单向阀、曲轴、自锁电磁推杆、艉部端盖、回油单向阀、外油囊及内油囊底盖,该艉部端盖上分别安装有出油单向阀及回油单向阀,所述内油囊
外壳的一侧与艉部端盖的内侧相连,该内油囊外壳的另一侧连接有内油囊底盖;所述浮力驱动电机及浮力电机密封壳均由内油囊底盖穿入,所述浮力驱动电机安装于艉部端盖上,输出轴与转动安装在所述艉部端盖上的曲轴相连,该浮力驱动电机外套有密封安装在所述艉部端盖上的浮力电机密封壳;所述内油囊活塞套设于浮力电机密封壳上,与该浮力电机密封壳密封滑动连接,所述滚动膜片的一侧与艉部端盖密封连接,另一侧与所述内油囊活塞密封连接;所述微型单柱塞单元及自锁电磁推杆分别安装于艉部端盖的内侧,该微型单柱塞单元与所述出油单向阀相对应,所述自锁电磁推杆与回油单向阀相对应,所述浮力驱动电机驱动曲轴旋转,通过所述曲轴推动微型单柱塞单元的活塞往复运动,将内油囊中的液压油通过所述出油单向阀泵入外油囊中,所述外油囊中的液压油通过自锁电磁推杆作用回油单向阀而流回内油囊中。
8.所述曲轴同心部分的轴向中心线与艉部端盖的轴向中心线共线,该曲轴的偏心轴部分套设有深沟球轴承b,所述曲轴通过深沟球轴承 b与所述微型单柱塞单元中的活塞滚动接触。
9.所述艉部端盖的内侧设有端盖出油口,该端盖出油口的一侧与所述微型单柱塞单元的柱塞泵出油口相对,且所述柱塞泵出油口与端盖出油口之间采用o型轴向密封圈密封;所述出油单向阀由艉部端盖外侧开设的螺纹孔拧入艉部端盖中,所述端盖出油口的另一侧与所述出油单向阀相对。
10.所述浮力驱动电机的输出轴通过联轴器与曲轴相连,并采用骨架油封为所述曲轴提供旋转密封。
11.所述滚动膜片的一侧设有径向o型密封圈,该径向o型密封圈套在所述艉部端盖上开设的径向密封槽中,该滚动膜片的另一侧设有轴向o型密封圈,所述轴向o型密封圈容置于内油囊活塞上开设的轴向密封槽中,并通过压紧盘固定于所述内油囊活塞上。
12.所述内油囊底盖上安装有浮力电位计。
13.所述艉部端盖上开设有向内油囊中注油的注油丝堵。
14.所述内油囊活塞与浮力电机密封壳之间采用星型圈作为动密封。
15.本实用新型的优点与积极效果为:
16.1.本实用新型采用一体化的整体结构技术方案,在载机空投或者船载抛投部署过程中抗冲击能力更强。
17.2.本实用新型采用一键式上电开关和柔性天线等技术方案,大大提高了载体的可操作性。
18.3.本实用新型对姿态调节装置和浮力调节装置两个滑翔机核心执行单元进行了微小化与低功耗设计,在极有限的空间内实现了水下滑翔机的全部功能并保证了续航能力(不小于45天)。
19.4.本实用新型成本低,可进行大量的部署作业以及抛弃式作业。
20.5.本实用新型重量体积小仅13公斤,可用利用无人机等进行空投高速部署,快速的对特定海域进行观测,很大程度上提高了海洋观测的时效性,具有重要的科学意义。
附图说明
21.图1为本实用新型的立体结构示意图;
22.图2为本实用新型的结构主视图;
23.图3为本实用新型的结构俯视图;
24.图4a为本实用新型艏部温盐深探测单元的结构示意图;
25.图4b为图4a的左视图;
26.图5a为本实用新型微型姿态调节装置的结构示意图之一;
27.图5b为本实用新型微型姿态调节装置的结构示意图之二;
28.图6为本实用新型微型浮力调节装置的立体结构示意图;
29.图7为本实用新型微型浮力调节装置的结构剖视图(外油囊处于最小状态);
30.图8为本实用新型微型浮力调节装置的结构剖视图(外油囊处于最大状态);
31.其中:1为艏部导流罩,2为艏部温盐深探测单元,3为一键式上电开关,4为固定能量单元,5为微型状态调节装置,6为电控单元,7为主耐压舱体,8为微型浮力调节装置,9为水平翼,10为垂直翼,11为艉部导流罩,12为微型柔性天线,13为深度探头,14为温盐深数据采集板,15为电导率探头,16为温度探头,17为空心方管轴,18为偏心主电池组,19为一体化俯仰驱动装置,20为横滚电位计,21为俯仰电位计,22为横滚驱动装置,23为浮力驱动电机, 24为内油囊外壳,25为艉部端盖,26为外油囊,27为浮力电位计, 28为艏部端盖,29为浮力电机密封壳,30为内油囊活塞,31为滚动膜片,32为十字滑槽联轴器,33为微型单柱塞单元,34为出油单向阀,35为曲轴,36为自锁电磁推杆,37为注油丝堵,38为回油单向阀,39为内油囊底盖,40为柱塞泵出油口,41为端盖出油口,42为螺纹孔,43为深沟球轴承a,44为深沟球轴承b,45为压紧盘。
具体实施方式
32.下面结合附图对本实用新型作进一步详述。
33.如图1~3所示,本实用新型包括艏部导流罩1、艏部温盐深探测单元2、一键式上电开关3、艏部端盖28、固定能量单元4、微型姿态调节装置5、电控单元6、主耐压舱体7、微型浮力调节装置8、水平翼9、垂直翼10、艉部端盖25、艉部导流罩11及微型柔性天线 12,其中主耐压舱体7的两端分别与艏部端盖28及艉部端盖25密封连接,固定能量单元4安装于艏部端盖28内,为水下滑翔机提供电能,该艏部端盖28外连接有艏部导流罩1,艏部导流罩1中设有安装在艏部端盖28上的艏部温盐深探测单元2;微型姿态调节装置5、电控单元6及微型浮力调节装置8分别安装于主耐压舱体7内,艉部端盖25外连接有艉部导流罩11,微型浮力调节装置8中的外油囊26 位于艉部端盖25外部、且位于艉部导流罩11内,与海水接触;主耐压舱体7上安装有水平翼9,垂直翼10及微型柔性天线12分别安装于艉部导流罩11上;微型姿态调节装置5中的动力源、微型浮力调节装置8中的动力源、微型柔性天线12及固定能量单元4分别与电控单元6相连,电控单元6中的主控制板控制微型浮力调节装置8和微型姿态调节装置5实现水下滑翔机的浮力大小调节和姿态调节,实现载体的锯齿形剖面运动。
34.本实施例的整机采用一体化结构设计,仅一个密封舱段(即主耐压舱体7),主耐压舱体7呈圆柱形,采用碳纤维复合材料,碳纤维复合材料具有比强度高,比刚度大的特点,在保证强度和稳定性前提下可以最大程度为载体提供浮力,艏部端盖28和艉部端盖25由于需要进行开口处理,故采用铝合金材料制成。艏部温盐深探测单元2中的温盐深数据采集板14、一键式上电开关3、固定能量单元4、微型姿态调节装置5、电控单元6及微型浮力调节装
置8均安装于密封的主耐压舱体7中,主耐压舱体7采用o型圈密封,可以满足最大工作深度1000米的技术要求。
35.本实施例的一键式上电开关3通过将旋转运动转化为直线运动,实现接触两个触点电机的接通与断开,可以在载体外部进行简单的旋转即可实现载体的上电断电操作,且体积重量非常小,很大程度上提高了载体的可操作性,缩短了布放前的复机时间。
36.本实施例的能量单元分为固定能量单元4及微型姿态调节装置5 中的偏心主电池组18,系统供电电压为12v,为微小型水下滑翔机提供能源,其中偏心主电池组18除了作为能量单元,同时作为微型姿态调节装置5中的质心调节重块,不需要增加额外的压载减少了总体重量。本实施例的固定能量单元4可为一次性锂电池。
37.本实施例的电控单元6为现有技术,包括主控制板、电子罗盘、无线电模块、gps模块及铱星模块,主控制板控制通过预编程的方式控制各执行机构的动作并采集水下滑翔机在作业过程中各项数据;电子罗盘用于检测水下滑翔机的姿态和航向,为水下滑翔机的姿态调节和航向控制提供反馈信息;无线电模块、gps、铱星模块用于载体的定位通讯;上诉主控制板及各模块固定在一块塑料板上形成一个整体,并通过两根拉杆固定在主耐压舱体7内。
38.本实施例的微型柔性天线12为现有技术,包括两段刚性段和一段柔性段,gps、铱星天线固定安装最顶端的peek(聚醚醚酮)高强度刚性段内,peek具备很好的透波能力确保组合天线的信号,中间段为橡胶硫化的柔性段可以随意弯折,方便运输,尾端段为铝合金刚性段用于与载体进行密封连接。
39.如图1~3及图4a、图4b所示,本实施例的艏部温盐深探测单元2包括深度探头13、温盐深数据采集板14、电导率探头15及温度探头16,本实施例采用oem化的探头将艏部端盖28融为一体,深度探头13通过压紧件固定在艏部端盖28的最前端,该深度探头13的压力探测膜与水体相接触;电导率探头15及温度探头16分别固定在艏部端盖28的边缘,保证在安装上艏部导流罩1后,两个探头可以与水体接触良好确保探测数据的准确性;温盐深数据采集板14通过塑料固定板安装于艏部端盖28的内部。
40.如图1~3及图5a、图5b所示,本实施例的微型姿态调节装置5 为现有技术,采用2017年7月7日公开,公开号为cn106926997a的“一种水下机器人用质心调节装置”。本实施例的微型姿态调节装置 5包括空心方管轴17,偏心主电池组18,一体化俯仰驱动装置19,横滚电位计20,俯仰电位计21及横滚驱动装置22,偏心主电池组 18通过方形配合孔安装在空心方管轴17上,可以相对于空心方管轴 17进行前后滑动,但不能相对于空心方管轴17进行转动。一体化俯仰驱动装置19安装于空心方管轴17内部,可以驱动偏心主电池组 18沿着空心方管轴17进行前后移动,俯仰姿态调节量通过俯仰电位计21进行反馈控制。横滚驱动装置22可以驱动空心方管轴17进行转动,进而带动偏心主电池组18进行转动,使得水下滑翔机产生横滚运动,横滚姿态调节量通过横滚电位计20进行反馈控制。在上浮和下潜过程中,水下滑翔机产生横滚姿态同时配合水平翼9和垂直翼 10可以进行水下滑翔机的航行控制。
41.如图1~3及图6~8所示,本实施例的微型浮力调节装置8包括浮力电位计27、浮力电机密封壳29、浮力驱动电机23、内油囊活塞 30、滚动膜片31、内油囊外壳24、联轴器、微型单柱塞单元33、出油单向阀34、曲轴35、自锁电磁推杆36、艉部端盖25、注油丝堵 37、回油单向阀38、外油囊26及内油囊底盖39,本实施例的艉部端盖25为固定依托,所有元器件均安装
在艉部端盖25上,同时艉部端盖25也作为液压系统的阀块,液压系统的各油路均加工在艉部端盖 25上,有效减小了液压系统的体积和重量。艉部端盖25上分别安装有出油单向阀34及回油单向阀38,内油囊外壳24的一侧与艉部端盖25的内侧相连,该内油囊外壳24的另一侧连接有内油囊底盖39;浮力驱动电机23及浮力电机密封壳29均由内油囊底盖39穿入,浮力驱动电机23安装于艉部端盖25上,输出轴与转动安装在艉部端盖 25上的曲轴35相连,该浮力驱动电机23外套有密封安装在艉部端盖25上的浮力电机密封壳29;内油囊活塞30套设于浮力电机密封壳29上,与该浮力电机密封壳29密封滑动连接,滚动膜片31的一侧与艉部端盖25密封连接,另一侧与内油囊活塞30密封连接;微型单柱塞单元33及自锁电磁推杆36分别安装于艉部端盖25的内侧,外油囊26安装于艉部端盖25的外侧,该微型单柱塞单元33与出油单向阀34相对应,自锁电磁推杆36与回油单向阀38相对应,浮力驱动电机23驱动曲轴35旋转,通过曲轴35推动微型单柱塞单元33 的活塞往复运动,将内油囊中的液压油通过出油单向阀34泵入外油囊26中,外油囊26中的液压油通过自锁电磁推杆36作用回油单向阀38而流回内油囊中。
42.本实施例的曲轴35的两端通过两个深沟球轴承a43转动安装于艉部端盖25上,曲轴35同心部分的轴向中心线与艉部端盖25的轴向中心线共线,同时在曲轴35的偏心轴部分套设有两个深沟球轴承 b44,曲轴35通过深沟球轴承b44与微型单柱塞单元33中的活塞滚动接触,从而将曲轴35在旋转推动柱塞过程中与柱塞之间的滑动摩擦转变为滚动摩擦,有效提高系统工作效率。
43.本实施例的微型单柱塞单元33通过两个m6螺钉固定连接在艉部端盖25上,在艉部端盖25的内侧设有端盖出油口41,该端盖出油口41的一侧与微型单柱塞单元33的柱塞泵出油口40相对,且柱塞泵出油口40与端盖出油口41之间采用o型轴向密封圈起到密封作用;出油单向阀34由艉部端盖25外侧开设的螺纹孔42拧入艉部端盖25中,端盖出油口41的另一侧与出油单向阀34相对。微型柱塞单元33产生的压力油可以通过出油单向阀34流入外油囊26中,而反向不能流动。
44.本实施例的浮力驱动电机23通过钟形罩固定于艉部端盖25上,浮力驱动电机23的输出轴与曲轴35通过联轴器相连接,同时用骨架油封为曲轴35提供旋转密封;本实施例的联轴器为十字滑槽联轴器 32。之后将浮力电机密封壳29套在浮力驱动电机23外侧,并通过螺钉固定在艉部端盖25上,艉部端盖25和浮力电机密封壳29之间采用径向o型圈密封,使得内油囊中的油液与浮力驱动电机23隔绝开来。浮力驱动电机23旋转带动曲轴35转动,从而带动微型单柱塞单元33的活塞上下往复运动,进而将内油囊中的油液泵向外油囊26中。
45.本实施例的回油单向阀38由艉部端盖25内侧开设的螺纹孔42 拧入艉部端盖25中,自锁电磁推杆36通过固定件同样安装在艉部端盖25上。正常状态外油囊26中的液压油无法通过回油单向阀38流回内油囊,自锁电磁推杆36的推杆通电时可以进行往复运动;正向通电时,自锁电磁推杆36的推杆伸出,将回油单向阀38的阀芯顶开,从而可以进行反向流动,此时在外油囊26回弹力的作用下液压油流回内油囊,断电后自锁电磁推杆36的推杆保持伸出状态,直至完成回油过程;之后反向通电,自锁电磁推杆36的推杆缩回,断电后自锁电磁推杆36的推杆保持缩回状态,回油单向阀38关闭。艉部端盖 25上开设有向内油囊中注油的注油丝堵37。
46.本实施例的外油囊26采用弹性较高的橡胶制作而成,油囊硫化成型时上面自带径
向o型圈,通过卡环固定安装于艉部端盖25上。
47.本实施例的滚动膜片31的一侧设有径向o型密封圈,该径向o 型密封圈套在艉部端盖25上开设的径向密封槽中,该滚动膜片31的另一侧设有轴向o型密封圈,轴向o型密封圈容置于内油囊活塞30 上开设的轴向密封槽中,并通过压紧盘45固定于内油囊活塞30上。滚动膜片31与内油囊活塞30通过滚动膜片31上自带的轴向o型密封圈进行密封,滚动膜片31的径向o型密封圈套在艉部端盖25的径向密封槽里,之后对滚动膜片31进行卷积处理,后将内油囊外壳24 套在滚动膜片31的外侧、并与艉部端盖25通过螺钉固定连接。内油囊底盖39通过螺钉固定在内油囊外壳24上,浮力电位计27通过螺钉固定于内油囊底盖39上。内油囊活塞30在工作过程中可以在浮力电机密封壳29上来回滑动,浮力电机密封壳29起到了很好的导向作用,防止活塞偏斜造成测量不准。内油囊活塞30和浮力电机密封壳 29之间采用星型圈作为动密封。
48.本实用新型的微型单柱塞单元33为市购产品,购置于德国哈威公司,型号为mpe4。本实用新型的自锁电磁推杆36为市购产品,购置于深圳宗泰机电有限公司,型号为sdk2
‑
0734s
‑
12a09
‑
09。
49.本实用新型微小型水下滑翔机的重量不大于12公斤,作业深度不小于1000米,续航时间不小于45天。
50.本实用新型的工作原理为:
51.本实用新型用于海洋环境观测的微小型水下滑翔机可以利用无人机或其他飞行器进行空投部署,也可以在科考船走航过程中进行大量抛投式部署,当航行至指定布放区域,将微小型水下滑翔机投放入水,入水后水下滑翔机与岸基通讯并接受指定任务开始作业。首先,微型浮力调节装置8开始工作,减小微小型水下滑翔机自身浮力,并调节水下滑翔机下潜作业俯仰姿态,此时水下滑翔机开始下潜,下潜过程中通过横滚装置来保证水下滑翔机的设定航向。当下潜至指定深度时(比如1000米),微型浮力调节装置8向外泵油使外油囊26体积变大,同时切换水下滑翔机的俯仰姿态使水下滑翔机向上运动并返回水面与岸基进行通讯。在下潜和上浮过程中,探测传感器全程工作,记录周期过程中的海试数据。当所有任务结束后,通过水下滑翔机提供gps点利用打捞网进行回收作业,由于本实用新型成本低,如回收成本较高或者难以回收的海域,也可以在所有任务结束后进行自毁。
52.水下滑翔机的浮力调节具体为:
53.当水下滑翔机需要增加载体排水体积时,需要将内油囊中的液压油排到外油囊26中,此时自锁电磁推杆36的推杆保持缩回状态,回油单向阀38关闭。浮力驱动电机23通电转动,通过十字滑槽联轴器 32带动曲轴35旋转,曲轴35在转动过程中推动微型单柱塞单元33 的活塞进行往复运动,实现吸排油动作,将内油囊中的液压油通过出油单向阀38泵入外油囊26中,由图7的状态变为图8所示的状态,实现外油囊26排水体积的增加。
54.当水下滑翔机在水面需要减少载体排水体积实现下潜动作时,自锁电磁推杆36正向施加脉冲电压(约50ms),此时自锁电磁推杆36 的推杆伸出,克服回油单向阀38阀芯中的复位弹簧的弹力作用而将阀芯顶开,使得回油单向阀38可以反向流动,在外油囊26的回弹力作用下液压油通过回油单向阀38被动流回内油囊中,由图8的状态变为图7所示的状态,实现外油囊26排水体积的减少。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

