1.本发明涉及一种用于船只或车辆的主体的悬架系统,特别是涉及一种调节主体的俯仰和侧倾姿态的悬架系统。
背景技术:
2.申请人的美国专利号9,061,735中显示了用于将船只支撑在四个点上方的相互连接的悬架系统的各种布置。然而,在快速调节相互连接的悬架系统中的流体体积以主动控制主体姿势的方案中,提供了一种布置,其中一个或多个动力哑铃设备控制各个悬架模式,例如侧倾和俯仰。
3.在车辆的所有四个角上使用与诸如螺旋弹簧之类的弹性构件串联的可调节柱塞的主动车身控制是众所周知的,并且例如在美国专利第6,000,702、6,249,728和8,355,840号中公开。但是,每个角的高度都使用阀歧管、压力源和储罐单独控制。
技术实现要素:
4.根据本发明的第一方面,提供了一种用于相对于至少四个点支撑主体的悬架系统,所述至少四个点包括左前点、右前点、左后点和右后点,该悬架系统包括:左前点和主体之间的左前支撑装置、右前点和主体之间的右前支撑装置、左后点和主体之间的左后支撑装置、以及右后点和主体之间的右后支撑装置;每个相应的左前支撑装置、右前支撑装置、左后支撑装置和右后支撑装置包括相应的弹性装置和相应的控制柱塞,每个控制柱塞包括形成相应的压缩控制容积的至少一部分的相应的压缩腔室,每个弹性装置作用于相应的压缩控制容积;控制装置,包括:第一对角可逆泵,用于在左前压缩控制容积和右后压缩控制容积之间转移流体;以及第二对角可逆泵,用于在右前压缩控制容积和左后压缩控制容积之间转移流体;其中,相应的弹性装置中的至少一个包括相应的阻尼装置,以可控制地限制和/或选择性地防止相应的弹性装置的至少一部分的压缩和/或膨胀。这种布置可以规定:在第一方向上驱动第一和第二对角可逆泵都可以调节主体的俯仰姿态,并且可以在第一方向上驱动第一对角可逆泵,而在相反(或第二)方向上驱动第二对角可逆泵调节主体的侧倾姿势。
5.可以根据控制装置的操作模式或根据操作者的输入和/或至少一个操作参数(例如速度、横向加速度、转向位置、输入大小、输入频率、主体运动幅度和/或频率)来控制通过相应的阻尼装置对相应的弹性装置的至少一部分的压缩和/或膨胀的可控制的限制和/或可选择的阻止。
6.每个相应的阻尼装置可包括可变或可控制的限制,以改变相应的弹性装置的至少一部分的压缩和/或膨胀的幅度、速度和/或加速度(或加速度或频率的变化率)。至少根据控制装置的操作模式、操作者输入和/或至少一个操作参数,可以改变或控制可变或可控制的限制。附加地或替代地,每个相应的阻尼装置可包括闭锁装置,以根据控制装置的操作模式、操作者的输入和/或至少一个操作参数来选择性地防止相应的弹性装置的至少一部分
的压缩和/或膨胀。
7.控制装置可以至少包括过渡模式,在该过渡模式中,调节主体的侧倾姿势以将主体侧倾成转弯。例如,它可以至少在诸如达到预定行程极限或横向加速度的某些情况下提供协调的转弯。
8.附加地或替代地,控制装置可以至少包括游荡模式,在该游荡模式中,调节主体的侧倾姿势和俯仰姿势以基本维持主体的侧倾姿势和俯仰姿势。例如,当静止或在位移模式下以低速或零速运动时,它可以提供俯仰和侧倾稳定的平台。
9.附加地或替代地,控制装置至少包括传递模式,在该传递模式中,主体的侧倾姿势和/或俯仰姿势被调节。例如,可以调节主体的侧倾和俯仰姿势以最小化主体上的(特定)点与相邻主体或结构上的点之间的相对垂直位移。
10.主体是船只的底盘,并且至少四个点可以包括位于至少一个左船体上的左前点和左后点以及位于至少一个右船体上的右前点和后右点。至少一个左船体可以是单个左船体,并且至少一个右船体可以是单个右船体。可选地,至少一个左船体可以是左前船体和左后船体,左前点位于左前船体上;左后点位于左后船体上;并且至少一个右船体可以是右前船体和右后船体,右前点位于右前船体上,右后点位于右后船体上。在任一种情况下,例如,如果主体包括固定的船体部分,则主体可以在使用中完全悬架在水面之上或与水面接合。
11.可替代地,主体可以是车辆的底盘,并且左前点可以位于左前轮组件上,左后点可以位于左后轮组件上,右前点可以位于右前轮组件上,右后点可以位于右后轮组件上。该车辆可以是诸如汽车、厢式货车或卡车之类的上路车辆,或者可以是诸如平地机或采矿卡车之类的运土车辆,或者可以是诸如拖拉机之类的农用车辆。
12.相应的弹性装置可包括相应的弹性支撑件。相应的弹性支撑件可以包括螺旋弹簧。替代地或附加地,相应的弹性支撑件可以包括气动弹簧,例如空气弹簧。替代地或附加地,相应的弹性支撑件可以包括与流体压力蓄能器至少选择性地连通的液压缸。
13.相应的控制柱塞可以与相应的支撑装置的相应的弹性支撑件串联。可替代地,相应的控制柱塞可以与相应的支撑装置的相应的弹性支撑件平行。相应的阻尼装置可以包括与相应的支撑装置的相应的弹性支撑件平行的减震器。
14.每个相应的弹性装置可以包括与相应的压缩控制容积至少可控制或选择性的流体连通的相应的流体压力蓄能器。每个相应的阻尼装置可包括相应的孔口和/或阻尼阀,以控制相应的流体压力蓄能器与相应的压缩控制容积之间的可控制或选择性的流体连通。替代地或附加地,每个相应的阻尼装置可包括相应的锁定阀,以控制相应的流体压力蓄能器与相应的压缩控制容积之间的可控制或选择性的流体连通。
15.每个相应的控制柱塞可以是单作用柱塞。
16.可替代地,每个相应的控制柱塞是双作用柱塞,并且包括相应的回弹腔室:左前控制柱塞的回弹腔室与右后控制柱塞的压缩腔室流体连通,形成右后压缩控制容积;右前控制柱塞的回弹腔室与左后控制柱塞的压缩腔室流体连通,形成左后压缩控制容积;左后控制柱塞的回弹腔室与右前控制柱塞的压缩腔室流体连通,形成右前压缩控制容积;右后左控制柱塞的回弹腔室与左前控制柱塞的压缩腔室流体连通,形成左前压缩控制容积。在每个控制柱塞中,回弹腔室的压力区域可以等于压缩腔室的压力区域。
17.悬架系统还可以包括:具有升沉压力腔室和四个系统压力腔室的升沉柱塞,四个
系统腔室中的每一个连接至左前压缩控制容积、右前压缩控制容积、左后压缩控制容积和右后压缩控制容积中的相应一个,以及与升沉压力腔室直接或间接流体连通的升沉流体压力蓄能器。升沉可逆泵可以设置在升沉压力腔室和升沉流体压力蓄能器之间,以用于在其间转移流体。例如升沉式可逆泵的布置可以使主体的高度得以调节。
18.可选地,在本发明的一种或多种形式中:每个相应的左前控制柱塞、右前控制柱塞、左后控制柱塞或右后控制柱塞还可以包括相应的回弹腔室;左前压缩腔室和右前回弹腔室流体连通并形成左前压缩控制容积的至少一部分;右前压缩腔室和左前回弹腔室流体连通,形成右前压缩控制容积的至少一部分;左后压缩腔室和右后回弹腔室流体连通并形成左后压缩控制容积的至少一部分;右后压缩腔室和左后回弹腔室流体连通,形成右后压缩控制容积的至少一部分。通过在每个容积中提供回弹力,该布置可以被动地提供比升沉和俯仰刚度更高的侧倾和翘曲刚度。
19.相应的左前压缩控制容积、右前压缩控制容积、左后压缩控制容积或右后压缩控制容积中的至少一个可以与相应的流体压力蓄能器至少可控制或选择性的流体连通。例如,每个相应的压缩控制容积可以与相应的流体压力蓄能器流体连通。所述流体连通可以使用例如节流、多级或可变阀来控制或衰减。替代地或附加地,例如当主体的速度低或为零时,即当主体基本上处于静止状态时,例如在控制主体的姿势(例如,侧倾和/或俯仰)期间,可以可控制地或选择性地阻止或防止所述流体连通。
20.控制柱塞可以支撑主体。例如,主体具有重量(由于其质量),并且控制柱塞可以支撑主体的几乎所有重量。替代地,控制柱塞可以支撑主体的一部分重量,并且悬架系统可以进一步包括支撑件。例如,支撑件可以在相应的左前、右前、左后和右后的支撑装置中的每一个中包括相应的弹性支撑件。每个支撑件可以与控制柱塞平行,即,主体的重量可以由支撑件和控制柱塞两者承担。
21.可替代地,在本发明的一种或多种形式中,每个支撑装置还可以包括相应的侧倾柱塞和相应的俯仰柱塞:每个相应的侧倾柱塞包括相应的侧倾压缩腔室和相应的侧倾回弹腔室,左前和左后侧倾压缩腔室以及右前和右后侧倾回弹腔室流体连通并形成左侧倾压缩容积,右前和右后侧倾压缩腔室以及左前和左后侧倾回弹腔室流体连通,形成右侧倾压缩容积;每个相应的俯仰柱塞至少包括相应的俯仰压缩腔室,左前和右前俯仰压缩腔室流体连通而形成前俯仰压缩容积,左后和右后俯仰压缩腔室流体连通而形成后俯仰压缩容积。在这种情况下,由于规定的相互连接,侧倾柱塞和纵倾柱塞可以提供零的翘曲刚度。
22.每个相应的俯仰柱塞可进一步包括相应的俯仰回弹腔室,所述左前和右前俯仰回弹腔室形成所述后俯仰压缩容积的一部分,所述左后和右后俯仰回弹腔室形成前俯仰压缩容积的一部分。替代地或另外地,在相应的支撑装置中的至少一个中,相应的控制柱塞可以被集成到相应的俯仰柱塞中或者被集成到相应的侧倾柱塞中。
23.在左侧倾压缩容积和右侧倾压缩容积之间可以连接有侧倾可逆泵。这可用于启用使用侧倾柱塞的主动侧倾姿势调节,例如在例如在转弯期间可能需要持续的侧倾姿势控制力的运输过程中船只底盘的侧倾驶入。
24.本发明的一种或多种形式可以包括翘曲载荷分配单元,该翘曲载荷分配单元至少包括由至少两个可移动构件限定的左前系统腔室、右前系统腔室、左后系统腔室和右后系统腔室,每个相应的系统腔室与相应的压缩控制容积流体连通,至少两个可移动构件流体
或机械地互连,使得其中一个可移动构件的运动促使另一个可移动构件的运动,左前系统腔室的体积沿与右后系统腔室相同的方向、在与右前系统腔室和左后系统腔室相反的方向上变化。在这种布置中的翘曲载荷分配单元可以被动地允许流体在左前/右后对角对的控制容积和右前/后左对角对的控制容积之间有效传递,从而适应控制柱塞的翘曲运动,即,随着左前系统腔室的容积增加,右后系统腔室的容积也增加,而右前和左后系统腔室的容积减小。
25.翘曲载荷分配单元可包括第一缸和与第一缸轴向对准的第二缸,至少两个可移动构件是第一活塞和第二活塞:第一活塞可滑动地位于第一缸中,并在第一缸中形成第一腔室和第二腔室,第二活塞可滑动地位于第二缸中,并在第二缸中形成第一腔室和第二腔室,第一活塞通过杆机械地连接到第二活塞。
26.杆可延伸穿过第一缸的第二腔室并且穿过第二缸的第一腔室。第一缸的第一腔室可以是左前系统腔室,第一缸的第二腔室可以是左后系统腔室,第二缸的第一腔室可以是右后系统腔室,并且第二缸的第二腔室可以是右前系统腔室。
27.可替代地,杆可以延伸穿过第一缸和第二缸的第一腔室和第二腔室。第一缸的第一腔室可以是左前系统腔室,第一缸的第二腔室可以是右前系统腔室,第二缸的第一腔室可以是右后系统腔室,并且第二缸的第二腔室可以左后系统腔室。
28.每个相应的控制柱塞可以是单作用柱塞。可替代地,每个相应的控制柱塞可以是包括相应的回弹腔室的双作用柱塞:左前控制柱塞的回弹腔室与右后控制柱塞的压缩腔室流体连通,形成右后压缩控制容积;右前控制柱塞的回弹腔室与左后控制柱塞的压缩腔室流体连通,形成左后压缩控制容积;左后控制柱塞的回弹腔室与右前控制柱塞的压缩腔室流体连通,形成右前压缩控制容积;右后左控制柱塞的回弹腔室与左前控制柱塞的压缩腔室流体连通,形成左前压缩控制容积。
29.翘曲载荷分配单元可以包括第一缸、第二缸、第三缸和第四缸,第一缸和第二缸彼此轴向对准,并且第三缸和第四缸彼此轴向对准。至少两个可移动构件可以包括可滑动地位于第二缸中的第一活塞和可滑动地位于第三缸中的第二活塞;第一活塞在第二缸中限定右后系统腔室和第一对角升沉腔室,第一杆从第一活塞穿过右后系统腔室延伸到第一缸中,从而限定左前系统腔室;第二活塞在第三缸中限定左后系统腔室和第二对角升沉腔室,第二杆从第二活塞穿过左后系统腔室延伸到第四缸中,从而限定右前系统腔室。第一对角升沉腔室和第二对角升沉腔室通过升沉导管连接。在这种布置中,翘曲运动使流体在第一对角升沉腔室和第二对角升沉腔室之间移动。
30.升沉流体压力蓄能器可以设置成与升沉导管流体连通。替代地或附加地,具有升沉调节蓄能器的升沉可逆泵可以与升沉导管流体连通地设置,该升沉可逆泵连接在升沉调节蓄能器和升沉导管之间,从而使得能够控制其间的流体流动以及调节主体相对于左前点、右前点、左后点和右后点升沉位置。
31.可以分别为左前、右前、左后或右后压缩控制容积中的至少一个设置至少一个相应的流体压力蓄能器。例如,每个相应的压缩控制容积可以与相应的流体压力蓄能器流体连通。流体连通可以使用例如节流阀或可变阀来衰减。替代地或附加地,可以选择性地阻止或防止流体连通。例如,当主体基本静止时,即理想地当冲击载荷没有达到峰值时,和/或当由于弹性将相位滞后增加到控制中正在主动控制主体的姿势时,至少一个流体压力蓄能器
与其相应的压缩控制容积之间的流体连通可以被阻止或防止。
32.本发明的另一方面提供了一种用于相对于至少四个点支撑主体的悬架系统,所述至少四个点包括左前点、右前点、左后点和右后点,所述悬架系统包括:左前点和主体之间的左前支撑装置、右前点和主体之间的右前支撑装置、左后点和主体之间的左后支撑装置、以及右后点和主体之间的右后支撑装置;每个相应的左前、右前、左后和右后支撑装置包括相应的控制柱塞,每个控制柱塞包括形成相应的压缩控制容积的至少一部分的相应的压缩腔室;控制装置,包括:第一对角可逆泵,用于在左前压缩控制容积和右后压缩控制容积之间转移流体;以及第二对角可逆泵,用于在右前压缩控制容积和左后压缩控制容积之间转移流体;其中,每个相应的左前、右前、左后或右后的控制柱塞还包括相应的回弹腔室,左前压缩腔室和右前回弹腔室流体连通并形成左前压缩控制容积的至少一部分,右前压缩腔室和左前回弹腔室流体连通,形成右前压缩控制容积的至少一部分,左后压缩腔室和右后回弹腔室流体连通并形成左后压缩控制容积的至少一部分,右后压缩腔室和左后回弹腔室流体连通,形成右后压缩控制容积的至少一部分。
33.由于系统(例如柔性软管)或流体的任何弹性、互连的双作用控制柱塞的这种布置可固有地(即,被动地)提供比升沉和俯仰刚度更高的被动侧倾和翘曲刚度。这种布置可以规定:在第一方向上驱动第一和第二对角可逆泵都可以调节主体的俯仰姿态,并且使得在第一方向上驱动第一对角可逆泵,而在相反的(或第二)方向上驱动第二对角可逆泵调节主体的侧倾姿势。
34.每个支撑装置可以包括作用在相应的压缩控制容积上的相应的弹性装置。每个支撑装置还可以包括相应的阻尼装置,可控地限制和/或选择性地防止相应的弹性装置的至少一部分的压缩和/或膨胀。可以根据控制装置的操作模式和/或根据操作者的输入和/或至少一个操作参数(例如速度、横向加速度、转向位置、输入尺寸、输入频率、主体运动幅度和/或频率)来控制通过相应的阻尼装置对相应的弹性装置的至少一部分的压缩的可控制的限制和/或可选择的阻止。
35.每个相应的阻尼装置可以包括可变的或可控制的限制,以改变相应的弹性装置的至少一部分的压缩和/或膨胀的幅度、速度和/或加速度(加速度或频率的变化率),至少根据所述控制装置的操作模式、操作者输入和/或至少一个操作参数(例如速度、横向加速度、转向位置、输入大小、输入频率、主体运动振幅和/或频率)来改变或控制可变或可控制的限制。附加地或替代地,每个阻尼装置可以包括相应的闭锁装置,以根据控制装置的操作模式、操作者的输入和/或至少一个操作参数(例如速度、横向加速度、转向位置、输入大小、输入频率、主体运动幅度和/或频率)来选择性地防止相应的弹性装置的至少一部分的压缩和/或膨胀。
36.控制装置可以至少包括过渡模式,在该过渡模式中,所述主体的侧倾姿势被调节为将主体侧倾成转弯。例如,它可以至少在诸如达到预定行程极限或横向加速度的某些情况下提供协调的转弯。
37.附加地或替代地,控制装置可以至少包括游荡模式,在该游荡模式中,调节主体的侧倾姿势和俯仰姿势以基本维持主体的侧倾姿势和俯仰姿势。例如,当静止或在位移模式下以低速或零速运动时,它可以提供俯仰和侧倾稳定的平台。
38.附加地或可替代地,控制装置可以至少包括传递模式,在该传递模式中,主体的侧
倾姿势和/或俯仰姿势被调节。例如,可以调节主体的侧倾和俯仰姿势以最小化主体上的(特定)点与相邻主体或结构上的点之间的相对垂直位移。
39.每个弹性装置可包括相应的流体压力蓄能器,该相应的流体压力蓄能器与相应的压缩控制容积至少可控制或选择性的流体连通。每个阻尼装置可包括相应的限制阀或阻尼阀,以限制相应的流体压力蓄能器和相应的压缩控制容积之间的流体连通。每个限制阀或阻尼阀可以例如根据控制装置的操作模式、操作者输入和/或至少一个操作参数是可变的或可控制的。附加地或替代地,每个阻尼装置可包括相应的锁定阀,以选择性地限制或防止相应的液压蓄压器和相应的压缩控制容积之间的流体连通。可以例如根据控制装置的操作模式、操作者输入和/或至少一个操作参数来控制每个锁定阀。
40.主体可以是船只的底盘,并且至少四个点可以包括位于至少一个左船体上的左前点和左后点以及位于至少一个右船体上的右前点和右后点。至少一个左船体可以是单个左船体,并且至少一个右船体可以是单个右船体。可选地,至少一个左船体可以是左前船体和左后船体,左前点位于所述左前船体上,并且左后点位于左后船体上;并且至少一个右船体可以是右前船体和右后船体,右前点位于右前船体上,右后点位于右后船体上。
41.可替代地,主体可以是车辆的底盘,并且左前点可以位于左前轮组件上,左后点可以位于左后轮组件上,右前点可以位于右前轮组件上,右后点可以位于右后轮组件上。
42.本发明的另一方面提供了一种用于相对于至少四个点支撑主体的悬架系统,所述至少四个点包括左前点、右前点、左后点和右后点,悬架系统包括:左前点和主体之间的左前支撑装置、右前点和主体之间的右前支撑装置、左后点和主体之间的左后支撑装置、以及右后点和主体之间的右后支撑装置;每个相应的左前、右前、左后和右后支撑装置包括相应的弹性装置和相应的控制柱塞,每个控制柱塞包括形成相应压缩控制容积的至少一部分的相应的压缩腔室,每个弹性装置具有一个相关的弹性量和作用在相应压缩控制容积上的每个弹性装置;控制装置,包括:第一对角可逆泵,用于在左前压缩控制容积和右后压缩控制容积之间转移流体;以及第二对角可逆泵,用于在右前压缩控制容积和左后压缩控制容积之间转移流体;其中,弹性装置中的至少一个包括阻尼装置,该阻尼装置布置成有助于作用在相应的压缩控制容积上的弹性量的可控修改。
43.本发明的另一方面提供了一种如在以下描述中描述或在附图中示出的悬架系统。
44.参照示出本发明优选方面的附图,将进一步方便地描述本发明。本发明的其他实施例是可能的,因此附图的特殊性不应被理解为取代了本发明的前述描述的一般性。
附图说明
45.在附图中:
46.图1是结合了本发明的第一种可能形式的双体船的示意图。
47.图2是结合了本发明的第二种可能形式的四体船的示意图。
48.图3是结合了本发明的第三种可能形式的双体船的示意图。
49.图4是本发明的第四种可能形式的示意图。
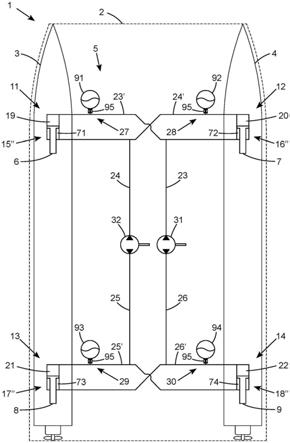
50.图5是本发明的第五种可能形式的示意图。
51.图6是本发明的第五种可能形式的示意图,其中增加了控制部件。
52.图7是本发明的第六种可能形式的示意图,示出了替代的控制部件。
53.图8是本发明的第七种可能形式的示意图,示出了另外的替代控制部件。
54.图9是本发明的第八种可能形式的示意图。
55.图10是本发明的第七种可能形式的示意图。
56.图11是结合了本发明的第八种可能形式的车辆的示意图。
57.图12是图3的控制柱塞中的一个的示意图。
58.图13是根据本发明的一种形式的支撑装置的示意图。
59.图14是图6的支撑装置中的一个的一部分的示意图。
60.图15是根据本发明的一种形式的替代的翘曲载荷分配单元的示意图。
61.图16是根据本发明的一种形式的另一替代的翘曲载荷分配单元的示意图。
具体实施方式
62.首先参考图1,示出了具有主体或底盘2、左船体3和右船体4的船只1。悬架系统5相对于左船体3和右船体4提供了主体或底盘2的至少部分支撑。例如,如果船体包括水接合部分,例如固定的中央船体,在使用中偶尔或永久地与船只漂浮于其上的水相接合,则该悬架系统只能相对于左右船体部分支撑主体或底盘。但是,如果主体例如位于左右船体的上方,则可以将主体或底盘完全支撑在左右船体的上方。船体可以通过任何已知的机构或悬架几何形状相对于主体定位,例如,在申请人的美国专利号9,272,753、国际专利公开号wo2017/147658或澳大利亚临时专利申请号2016904236中公开的任何布置。
63.悬架系统5相对于分布在船体上的四个点支撑主体或底盘2,这四个点是左船体3上的左后点8前方的左前点6以及右船体4上的右后点9前方的右前点7。悬架系统5包括:在左前点6与底盘2之间的左前支撑装置11;在右前点7和底盘2之间的右前支撑装置12;在左后点8和底盘2之间的左后支撑装置13;以及右后点9和底盘2之间的右后支撑装置14。每个支撑装置包括各自的控制柱塞,在该示例中是单作用柱塞,其可以利用回弹腔室进行回弹阻尼,并在活塞上设置阀,这是众所周知的。左前控制柱塞15包括连接到形成左前压缩控制容积27的左前压缩导管23的左前压缩腔室19。右前控制柱塞16包括连接到形成右前压缩控制容积28的右前压缩导管24的右前压缩腔室20。左后压缩柱塞17包括连接到形成左后压缩容积29的左后压缩导管25的左后压缩腔室21压缩腔室。右后控制柱塞18包括连接到形成右后压缩控制容积30的右后压缩导管26的右后压缩腔室22。
64.第一对角可逆泵31连接在左前压缩导管23和右后压缩导管26之间,以使流体能够在左前压缩控制容积27和右后压缩控制容积30之间传递。第二对角可逆泵32连接在右前压缩导管24和左后压缩导管25之间,以使流体能够在右前压缩控制容积28和左后压缩控制容积29之间传输。同时向前或向后运行两个泵31、32的四个可能的排列实现侧倾到左右以及俯仰到前后的四个底盘位移。
65.例如,使第一和第二对角可逆泵31、32在相同方向上,即在第一方向上运行,可将流体从右后和左后压缩控制容积30、29泵入左前和右前压缩控制容积27、28,使底盘向后俯仰,即向上倾斜。在那种情况下,第一对角可逆泵31和第二对角可逆泵32都反向(即,在与第一方向相反的第二方向上)运行,可以将流体从左前和右前压缩控制容积27、28泵入右后和左后压缩控制容积30、29中,导致底盘2向前俯仰,即向下倾斜。在与第二对角可逆泵32相反的方向上运行第一对角可逆泵31,即在第一方向上运行第一对角可逆泵和在第二方向上运
行第二对角可逆泵可以从右后和右前压缩控制容积30、28泵送流体进入左前和左后压缩控制容积27、29,使底盘2向右侧倾。类似地,通过沿第二方向驱动第一对角可逆泵且沿第一方向驱动第二对角可逆泵,可使底盘相对于船体上的四个点向左侧倾。如果改变了其中一个泵的第一方向的定义,则侧倾结果将例如是俯仰结果。
66.有两种已知的方法可以使泵的流动方向反向。第一种是使用始终沿驱动马达方向确定的方向泵送的泵,在这种情况下,要使泵的方向反向,则使马达方向反向。第二种是使用这样的泵:该泵可以在从马达输入的恒定方向上改变流向,即,可以在不改变马达方向的情况下改变流向。例如,如果使用可逆可变斜盘泵,则可以在不改变马达旋转方向的情况下改变泵的流量和流向。这可以允许单个马达将多个泵驱除(或由单个马达驱动),并根据需要对每个泵的流速和流向进行独立控制。
67.如果需要向左侧倾并向前俯仰,则可能只需要驱动第一对角泵。例如,继续上面的示例,如果在第二方向上驱动第一对角可逆泵31,则流体将从左前压缩控制容积27排入右后压缩控制容积30。第一和第二对角可逆泵的第一和第二方向(即,前进和后退)运行的不同量值的任何组合可以提供底盘2相对于左船体和右船体上的四个点6、7、8、9的侧倾和/或俯仰姿态调节的任何期望的组合。
68.第一和第二对角可逆泵31、32可用于在传输期间,即当邻近固定物体(例如风力涡轮机塔架或码头)时,或当邻近浮动物体(例如另一艘船或浮桥)时,调节底盘2的姿态。可以控制第一和第二对角可逆泵,以使用控制柱塞15、16、17、18相对于四个点6、7、8、9调节底盘,以保持或最小化底盘各点之间的变化,例如船头的中点和相邻的固定或浮动对象上的点。替代地或附加地,第一和第二对角可逆泵31、32可用于在运输(即,行进中)和/或静止时调节底盘2的姿态。
69.流体压力蓄能器33、34、35、36被示出为连接到相应的柱塞15、16、17、18的相应的压缩腔室19、20、21、22。当调节主体的侧倾和俯仰姿态时,弹性增加了对第一和第二对角可逆泵31、32的控制的复杂性,因此,如果设置了蓄能器33、34、35、36,则优选地,每个蓄能器通过各自的阻尼阀和/或锁定阀连接至各自的压缩腔室19、20、21、22。在图1中,示出了阻尼阀55。然而,在图2中,示出了连接到相应的柱塞压缩腔室的流体压力蓄能器33、34、35、36具有锁定阀56。这允许相应的柱塞压缩腔室蓄能器33、34、35、36的回弹力被隔离。在图2中还以虚线示出了在锁定阀周围的旁路中的可选孔口57或阻尼阀。这样的孔口可有利于允许低流速以减小在锁定阀打开之前蓄能器与相关的压缩腔室之间的压力差。可以控制孔口57或阻尼阀,以在关闭闭锁装置时将流量降至最低,但允许较高的流量,以便在打开锁定阀之前实现更快的压力均衡效果。
70.柱塞压缩腔室蓄能器33、34、35、36的弹性可以在船舶运输过程中运行,包括在控制船舶的侧倾姿态以使主体倾斜转弯时(例如在进行协调转弯时)。这样的“侧倾驶入”控制不需要是高频反馈控制,并且由于在侧倾模式中由柱塞压缩腔室蓄能器提供的弹性而通常不会遭受不稳定。相反,在游荡或传递模式下,当船只静止或以非常低的速度运动时,并且当使用第一和第二对角可逆泵31、32来控制主体的侧倾和俯仰姿态时,可以使用可控制的阻尼阀来限制柱塞压缩腔室蓄能器33、34、35、36,使用锁定阀56或绕过锁定阀的限制孔口57来隔离。
71.过渡模式的一个示例是船舶在航行中并且可以在船体操作的滑行,半滑行或位移
模式下操作。游荡模式的一个示例是当船只静止并且主体或甲板侧倾和俯仰稳定或补偿时。例如,为了使用位于船体上的瞄准器或摄像机聚焦在远处的物体上,可以主动地控制主体的侧倾和俯仰姿态以最小化这种姿态变化。传递模式的一个示例是当船只与塔架、母船或任何其他固定或浮动结构相邻时,将主体的某个点与相邻结构上的点之间的垂直变化最小化,从而使人或货物可以被转移。尽管船只通常在游荡和传递模式下是静止的或以低速操作,但是在游荡模式下,调节主体的俯仰和侧倾以最小化主体的俯仰和俯仰姿态的变化。相反,在传递模式下,可以调节主体的倾斜和/或侧倾(以及可选的升沉),以使主体上的点与相邻物体或结构上的点之间的垂直距离的变化最小。
72.同样在图2中添加了升沉调节。由于本文公开的所有悬架装置均适用于在船体的每一侧上或朝向船体的每一侧具有一个或两个船体的任何船舶,因此这四个点现在分布在四个船体之间,即,船舶1现在是四体船。左前点6在左前船体37上,右前点7在右前船体38上,左后点8在左后船体39上,右后点9在右后船体40上。例如,从申请人的美国专利号7,314,014和9,150,282中获知了这种四体船。
73.为了将升沉调节功能添加到图1的布置中,在图2中,提供了升沉调节装置41。图2所示的升沉调节装置41类似于申请人的国际专利公开号wo2016/081990中所示的升沉调节装置。升沉柱塞42包括四个较小横截面的系统缸和升沉缸,它们均被牢固地连接。类似地,每个缸都包括带有四个系统活塞的活塞以及作为活塞组件48牢固地连接的升沉活塞。升沉柱塞中每个系统缸中的活塞限定了系统压力腔室43、44、45、46,而升沉缸中的活塞限定了升沉压力腔室47。左前系统压力腔室43通过左前升沉导管51连接至左前压缩控制容积27。右前系统压力腔室44通过右前升沉导管52连接至右前压缩控制容积28。左后系统压力腔室45通过左后升沉导管53连接到左后压缩控制容积29。右后系统压力腔室46通过右后升沉导管54连接到右后压缩控制容积30。
74.随着左前、右前、左后和右后支撑装置11、12、13、14上的负载增加,各个控制柱塞15、16、17、18的各个压缩腔室19、20、21、22中的压力相应地增加。相应的压缩导管23、24、25、26和相应的升沉导管51、52、53、54将增加的压力传递至升沉柱塞42中的相应系统压力腔室43、44、45、46,这增加了升沉压力腔室47中的压力。如果省略了升沉可逆泵50,并且将升沉压力腔室47直接连接到升沉流体压力蓄能器49,则活塞组件48移位,直到例如升沉流体压力蓄能器49中的压力等于升沉压力腔室47中的压力。
75.然而,如果如图2所示提供了升沉可逆泵,那么驱动升沉可逆泵可以使升沉压力腔室47和升沉压力蓄能器49之间的流体移位,这使活塞组件48移位,并且同时改变左前、右前、左后和右后压缩控制容积中的每个中的流体体积,从而影响底盘2相对于四个点6、7、8、9的高度或升沉位置的变化。悬架系统5的其余部分与图1所示的泵相同,并且第一和第二对角可逆泵31、32的操作也可以与关于图1所描述的相同。
76.图3显示了控制柱塞的另一种构造,其为双作用、直通杆(或相等的压缩和回弹压力区域)式样的柱塞。悬架系统5被示为在具有中央船体70的三体船上,该中央船体70可以例如被固定至主体或底盘2,因此,在图1和图2中,底盘可以相对于两个或四个船体上的四个点6、7、8、9基本上支撑,在图3中,底盘的一些质量由整体或固定的中央船体70支撑,因此,底盘2仅相对于四个点6、7、8、9被部分地支撑在左和右船体3、4上。再次,本文详述的所有悬架装置都适用于该固定的中心壳体,一个左壳体和一个右壳体构型,并且图3所示的悬
架装置适用于在主体两侧或朝向主体具有一个或两个船体的船舶,例如双体船和四体船。
77.现在,左前控制柱塞15'包括连接到右后压缩控制容积30的左前回弹腔室71。类似地,右前控制柱塞16'包括连接到左后压缩控制容积29的右前回弹腔室72。左后控制柱塞17'包括连接到右前压缩控制容积28的左后回弹腔室73。右后控制柱塞18'包括连接到左前压缩控制容积27的右后回弹腔室。
78.再次,第一和第二对角可逆泵31、32的连通性与图1和图2相同。也就是说,第一对角可逆泵31连接在左前压缩导管23和右后压缩导管26之间,以使流体能够在左前压缩控制容积27和右后压缩控制容积30之间传输。第二对角可逆泵32连接在右前压缩导管24和左后压缩导管25之间,以使流体能够在右前压缩控制容积28与左后压缩控制容积29之间传递。第一对角可逆泵31和第二对角可逆泵32的操作也可以与关于图1所描述的相同,以提供主体或底盘2的侧倾姿势和俯仰姿势的调节。
79.控制柱塞和互连件的这种布置可提供零升沉刚度,即,它不提供垂直支撑力,因此每个相应的支撑布置11、12、13、14还包括相应的左前、右前、左后或右后弹性支撑件75、76、77、78,在此示例中显示为左前、右前、左后或右后空气弹簧79、80、81、82。
80.优选地,弹性支撑件75、76、77、78被阻尼。因此,与每个空气弹簧79、80、81、82平行的是一个相应的减震器58。该减震器可以在空气弹簧之内或旁边,并显示为线性类型,例如带有适当孔口的液压或气压柱塞,最好是可控的。这种可控的减震器或可变阻尼器可用于阻尼或限制弹性支撑件75、76、77、78的回弹力,尤其是在主体的姿态被控制以用于在至少游荡或传递期间,使用第一和第二对角可逆泵31、32在运输过程中侧倾驶入或俯仰和侧倾时。
81.由于控制柱塞和互连件的布置可以提供零升沉刚度和零翘曲刚度,因此,如果需要较高的侧倾和俯仰刚度,则可以不提供附加的回弹力。然而,由于流体随温度而膨胀,对于压力控制而言,蓄能器是提供压力调节的直接方式,即,由蓄能器提供的回弹将使压缩控制容积27、28、29、30中的压力变化最小化。优选地,分别为左前、右前、左后和右后压缩控制容积中的每一个提供相应的流体压力蓄能器91、92、93、94。这不仅可以提供随着温度的压力调节功能,还允许较低的侧倾和俯仰刚度,但是每个蓄能器的回弹力仍可以通过减震装置(例如可切换或可变限制或锁定阀)可变地、可控制地或选择性地与相应的压缩控制容积连通。
82.图4示出了悬架系统5的替代布置,其中,控制柱塞15、16、17、18与弹性支撑件75、76、77、78串联布置。在该示例中,相应的左前、右前左、右后或右后弹性支撑件75、76、77或78是各自的螺旋弹簧83、84、85或86,每个各自的控制柱塞15、16、17、18是单作用柱塞,活塞在其中提供或分别安装在用于相应螺旋弹簧的左前、右前、左后或右后弹簧座87、88、89或90上。第一和第二对角可逆泵31、32设置在左前和右后之间或右前和左后压缩控制容积27和28或29和30之间,如图1中所示,并且可以类似的方式操作。
83.尽管与控制柱塞15、16、17、18串联增加回弹力75、76、77、78可以在控制中增加相位滞后并使控制更加复杂,但图4中的布置可以提供完整的悬架系统。优选地,使用可选的减震器58对回弹力75、76、77、78进行阻尼,以降低控制复杂性并改善被动操作,在该示例中,该减震器58以典型的“盘绕”布置在螺旋弹簧内部示出。如图所示,当设置有减震器58时,其优选地与相应的螺旋弹簧的回弹力平行地作用。优选地,减震器是可变阻尼器。
84.如果使用独立的、不可调节的刚度弹性支撑件,通常对于实际操作来说,侧倾刚度太低和/或升沉刚度太高,但是增加了俯仰和侧倾调节,如图4的悬架系统5所示,如例如在申请人的国际专利申请公开号wo2015172188中所讨论的那样,允许调节侧倾姿势以至少部分地补偿低侧倾刚度、或主动地保持侧倾的基本水平姿态、或侧倾到拐角。在这种悬架配置中,例如在传递期间,即在与另一主体(例如,风轮机基础)或另一艘船舶(例如,母舰)相邻时,在仍然可以在其他情况下调节主体的姿态。
85.图5示出了具有不相等的压缩和回弹压力区域的双作用控制柱塞的替代构造。悬架系统5再次如图1和图4所示在双体船上,其中主体或底盘2可通过相应的支撑装置11、12、13、14相对于两个船体上的四个点6、7、8、9基本支撑。现在,左前控制柱塞15”包括一根杆,该杆延伸通过左前回弹腔室71,但不延伸穿过左前压缩腔室19。每个相应的控制柱塞15”、16”、17”、18”具有类似的构造,其中杆延伸穿过相应的回弹腔室71、72、73、74,但不穿过相应的压缩腔室19、20、21、22。
86.前双作用控制柱塞交叉连接,后双作用控制柱塞交叉连接。更具体地,前左控制柱塞15”的前左压缩腔室19通过左前系统导管23'连接到前右控制柱塞16”的前右回弹腔室72。右前控制柱塞16”的右前压缩腔室20通过右前系统导管24'连接到左前控制柱塞15”的左前回弹腔室71。左后控制柱塞17”的左后压缩腔室21通过左后系统导管25'连接到右后控制柱塞18”的右后回弹腔室74。右后控制柱塞18”的右后压缩腔室22通过右后系统导管26'连接到左后控制柱塞17”的左后回弹腔室73。
87.优选地,相应的系统流体压力蓄能器91、92、93或94设置成与相应的左前、右前、左后或右后系统导管23',24',25'或26'流体连通。尽管蓄能器是可选的,但如果控制柱塞提供主体2的恒定的或大部分支撑,则需要某种形式的回弹力。该或每个相应的系统流体蓄能器可以通过阀进行切换和/或使用可变流量阀进行阻尼,例如多级被动阻尼阀或受控可变流量阀。为此,在每个相应的系统流体压力蓄能器91、92、93、94和相应的系统导管23',24',25',26'之间示出了可选的相应的蓄能阀95,其提供了阻尼、限制和/或锁定相应蓄能器的弹性,使其免受相应系统导管或其余系统容积的影响。
88.前后一对交叉连接的双作用控制柱塞的布置可用于为主体的至少一部分提供支撑,并具有弹性,例如所示的蓄能器可提供升沉刚度和与升沉刚度相同的俯仰刚度。该布置还提供了侧倾刚度和翘曲刚度,其均高于升沉刚度和俯仰刚度。
89.每个左前、右前、左后或右后系统导管23'、24'、25'或26'及其相关的压缩腔室19、20、21或22;回弹腔室72、71、74或73;以及相应的回弹力(例如相应的系统流体压力蓄能器91、92、93或94)连接到相应的压缩导管23、24、25或26,其形成相应的压缩控制容积27、28、29或30。例如,左前压缩控制容积27包括左前控制柱塞15”的左前压缩腔室19、左前系统导管23'、右前双作用控制柱塞16”的右前回弹腔室72、左前蓄能器91的液体腔室和左前压缩导管23。
90.再次,第一和第二对角可逆泵31、32的连通性与图1和图2相同。也就是说,第一对角可逆泵31连接在左前压缩导管23和右后压缩导管26之间,使流体能够在左前压缩控制容积27和右后压缩控制容积30之间传输。第二对角可逆泵32连接在右前压缩导管24和左后压缩导管25之间,以使流体能够在右前压缩控制容积28与左后压缩控制容积29之间传输。第一对角可逆泵31和第二对角可逆泵32的操作也可以与关于图1所描述的相同,以提供主体
或底盘2的侧倾姿势和俯仰姿势的调节。
91.对本领域技术人员显而易见的是,压缩导管23、24、25、26和/或系统导管23',24',25',26'的一部分可以是或包括在歧管块、管道和/或软管中的至少一个相应的通道。
92.类似地,任何导管都可以包括阻尼阀或孔口限制。这些可用于衰减系统中的共振频率,或限制控制柱塞的位移速率和幅度。例如,如图6所示(该图显示了前后一对交叉连接的双作用控制柱塞的布置与图5相同),可以在相应的支撑装置11、12、13、14的相应的压缩腔室19、20、21、22以及相应的系统导管23'、24'、25'、26'之间提供相应的压缩阻尼阀96。在图6中还示出了可选的相应的回弹阻尼阀96,每个均设置在相应的支撑装置11、12、13、14的相应的回弹腔室71、72、73、74与相关的系统导管24'、23'、26'、25'之间。可替代地,这种压缩或回弹阻尼阀可以成行放置在远离双作用控制柱塞15”、16”、17”、18”的各个系统导管中。
93.为了限制或防止不必要的流过第一和第二对角可逆泵31、32,可以将阀98与泵一体地设置,或者设置在左前或左后压缩导管23、25中的至少一个中以及右前或右后压缩导管24、26中的至少一个中。如果阀98是如图6所示的锁定阀,除了防止当泵31、32处于空转状态时校正前和后系统容积之间的流体的不必要的功耗以及防止在静止状态下(例如,马达304不运行时)主体的俯仰姿态的不希望的漂移外,它们还可以提供故障安全功能。
94.图6还示出了用于第一和第二对角可逆泵31、32的驱动装置300。每个对角可逆泵31、32可以是可变排量泵,例如斜盘泵,并且可以例如由皮带、齿轮或通常由轴301驱动。最简单的形式是两个对角可逆泵31、32通过单个轴直接由马达304驱动。但是,每个泵都可以通过离合器与轴或其他驱动器相连,以有选择地允许驱动泵。类似地,各个对角可逆泵31、32可以由借助一个或多个马达依次驱动的各个轴驱动。马达304可以是柴油马达、其他形式的燃烧马达、电动马达或任何其他形式的马达。
95.优选地,驱动装置300还包括某种形式的液压或电能蓄能器或动力收集装置310。如果仅使用蓄能器装置,则当对角可逆泵的动力需求较低时,可以由马达对其进行充电,然后,向泵提供的峰值能量要比马达自己提供的峰值能量大。然而,理想地,驱动装置300包括动力收集装置310,其中,可以通过马达304以及第一和/或第二对角泵31、32两者来给蓄能器312充电。这允许收集来自主体相对于左前、右前、左后和右后的支撑点的不期望的俯仰和侧倾运动的动力,以便在高需求时进行补给。
96.在图6中,示出了液压形式的动力收集装置310,其包括流体压力形式的蓄能器312的、蓄能器锁定阀314、可变排量双旋转泵/马达316和流体储存器318。泵/马达316可以使用来自马达304和/或泵31、32的能量来从储存器318中抽出流体并将其泵送到蓄能器312中,该蓄能器在该示例中是液压气动流体压力蓄能器。相反,当泵31、32所需的能量比马达304可用的更多时,能量可以从蓄能器312释放,以在马达304的速度和能量输出增加时提供快速的初始响应,或者在高峰需求时提供附加的功率。
97.能量以高压流体的形式从蓄能器312释放出来,以驱动马达/泵316,驱动轴301并将低压流体返回到储存器318。阀314可用于控制或阻止流体离开蓄能器312。这可以用于控制通过马达/泵316的流体返回,或者通过防止加压流体离开蓄能器而将能量保持在蓄能器312的流体容积内。
98.图7示出了应用于改进的悬架系统5的可替代的动力收集装置310,该悬架系统5具
有与图5和6相同的前后对的交叉连接的双作用控制柱塞对的基本布置。然而,尽管在图5中各个支撑装置11、2、13、14上没有示出阻尼阀并且在图6中控制柱塞15”、16”、17”、18”上示出了各个压缩和回弹阻尼阀96、97,图7示出了控制柱塞15”'、16”'、17”'、18”',每一个都包括附加的压缩腔室98和回弹腔室99,以使用单独的体积给系统体积提供阻尼。在所示的示例中,每个控制柱塞的附加压缩和回弹腔室98、99通过组合的压缩和回弹阻尼阀96、97连通。如该示例中,附加的压缩和回弹腔室具有相等的截面积,对弹性的需求最小,以补偿由于温度变化而引起的流体体积变化。
99.图7中的动力收集装置310是电类型的,功率由发电机320(例如,内燃机驱动的发电机)提供。蓄能器312'是电的,在该示例中是超级电容器,基本上与发电机320并联,并且控制器322控制去往/来自驱动对角可逆泵31、32或由对角可逆泵31、32驱动的马达/发电机324的功率流。当泵31、32所需的功率小于发电机320所产生的功率时,则超级电容器或蓄能器312'被充电,从而存储能量。当泵31、32需要发电机320可以提供的更多能量时,可以由超级电容器或蓄能器312'提供能量,以满足驱动泵31、32的马达/发电机324的峰值能量需求。
100.在图8中示出了类似的电类型的动力收集装置310,唯一的区别在于:蓄能器312”被示出为电池而不是图7的超级电容器。操作类似于图7的动力收集装置。单独的阻尼缸。
101.图8示出了改进的悬架系统5,其具有与图5、6和7相同的前后对的交叉连接的双作用控制柱塞的基本布置。然而,尽管在图5中各个支撑布置11、2、13、14上未示出阻尼阀,在图6中的控制柱塞15”,16”,17”,18”上显示了各个压缩和回弹阻尼阀96、97,在图8中,在各个单独的左前、右前、左后或右后阻尼缸59、60、61、62的每一个上均设有压缩和回弹阻尼阀96、97。每个相应的阻尼缸平行于各个控制柱塞15”、16”、17”、18”定位在主体2和相应的左前、右前、左后和右后点6、7、8、9之间。作为阻尼缸59、60、61、62,每个具有压缩腔室98到回弹腔室99的不平坦的区域,需要弹性来通过压缩和回弹行程吸收或补偿阻尼缸内的杆容积的变化。这由每个阻尼缸59、60、61、62上的流体压力蓄能器63提供,该蓄压器也可用于确保阻尼缸中的压力保持正值,从而延长流体寿命并最大程度地减少由于温度变化引起的平均压力变化。
102.图9中的悬架系统5包括结合到模态悬架系统中的图1的控制柱塞装置。在相应的左前、右前、左后和右后的每个支撑装置11、12、13、14中,模态悬架系统包括相应的侧倾柱塞101、102、103、104和相应的俯仰柱塞131、132、133、134。理想的是,如图所示,侧倾柱塞和俯仰柱塞是双作用的,尽管单作用的俯仰柱塞是可行的。
103.各个侧倾柱塞101、102、103、104中的每一个包括各自的左前、右前、左后或右后的侧倾压缩腔室105、106、107、108和各自的侧倾回弹腔室109、110、111、112。左前侧倾压缩腔室105通过左侧倾压缩导管113与左后侧倾压缩腔室107连接。右前侧倾压缩腔室106通过左侧倾压缩导管114与右后侧倾压缩腔室108连接。左前侧倾回弹腔室109通过左侧倾回弹导管115连接至左后侧倾回弹腔室111。右前侧倾回弹腔室110通过左侧倾回弹导管116与右后侧倾回弹腔室112连接。左侧倾压缩导管113通过左侧倾交叉导管117连接到右侧倾回弹导管116,形成左侧倾压缩容积,并且类似地,右侧倾压缩导管114通过左侧倾交叉导管118连接到左侧倾回弹导管115,形成右侧倾压缩容积。左侧倾压缩蓄压器119连接至左侧倾压缩容积,右侧倾压缩蓄压器120连接至右侧倾压缩容积。该布置提供比来自支撑布置中的侧倾柱塞101、102、103、104的升沉刚度更高的侧倾刚度。
104.可以使用侧倾可逆泵123通过左侧倾调节导管121和右侧倾调节导管122在左右侧倾容积之间传输流体来提供动力侧倾驶入功能。在设有第一和第二对角可逆泵31、32的悬架系统中提供这种侧倾调节装置可能是合适的,特别是在左前、右前、左后和右后控制容积27、28、29、30的回弹力很小的情况下。例如,可以在船舶运输过程中操作侧倾可逆泵,并且在传输操作期间控制底盘侧倾和俯仰姿态时可以操作第一和第二对角可逆泵31、32。
105.各个俯仰柱塞131、132、133、134中的每个均包括各自的左前、右前、左后或右后俯仰压缩腔室135、136、137、138和各自的俯仰回弹腔室139、140、141、142。左前俯仰压缩腔室135通过前俯仰压缩导管143连接到右前俯仰压缩腔室136。左后俯仰压缩腔室137通过后俯仰压缩导管144连接到右前俯仰压缩腔室138。左前俯仰回弹腔室139通过前俯仰回弹导管145连接至右前俯仰回弹腔室140。左后俯仰回弹腔室141通过后俯仰回弹导管146与右后俯仰回弹腔室142连接。前俯仰压缩导管143通过前俯仰交叉导管147连接到后俯仰回弹导管146,从而形成前俯仰压缩容积,并且类似地,后俯仰压缩导管144通过后俯仰交叉导管148连接到前俯仰回弹导管145,从而形成右侧倾压缩容积。前俯仰压缩蓄能器149连接到前俯仰压缩容积,后俯仰压缩蓄能器150连接到后俯仰压缩容积。该布置提供比来自支撑布置中的俯仰柱塞131、132、133、134的升沉刚度更高的俯仰刚度。
106.每个俯仰柱塞均显示为有效结合了相应控制柱塞的三腔柱塞,为清楚起见,在图14中将右前俯仰柱塞显示为较大。因此,再次参考图9,在左前俯仰柱塞131中提供了第二压缩腔室19,由图1的左前控制柱塞形成左前压缩腔室19,该左前压缩腔室19与左前压缩导管23一起形成了左前压缩控制容积27。类似地,在右前俯仰柱塞132中,提供第二压缩腔室20,由图1的右前控制柱塞形成右前压缩腔室20,右前压缩腔室20与右前压缩导管24一起形成右前压缩控制容积28。在左后俯仰柱塞133中,提供了第二压缩腔室21,由图1的左前控制柱塞形成左后压缩腔室21,左后压缩腔室21与左后压缩导管25一起形成左后压缩控制容积29。在右后俯仰柱塞134中,提供第二压缩腔室22,由图1的左前控制柱塞形成左后压缩腔室22,左后压缩腔室22与右后压缩导管26一起形成右后压缩控制容积30。
107.尽管可以在相应的压缩控制容积27、28、29、30中提供回弹力,但是如果所述相应的压缩控制容积在基本静止时(例如在许多传递操作期间)被加压,并且在输入加速度较高的运输期间基本上向油箱开放,则控制容积中可能不需要弹性。故意提供的额外弹性的缺乏改善了俯仰和侧倾姿态控制装置在操作时的响应。船体与水的相互作用提供的顺应性足以防止在某些或大多数传递作业中出现不可接受的高压峰值,尽管这取决于船体形式和遇到的典型海况。再次,第一和第二对角可逆泵31、32的操作可以如关于图1所讨论的。
108.图10将翘曲模式设备添加到图1的悬架系统5中,以去除控制柱塞15、16、17、18的布置的翘曲刚度。该设备是翘曲载荷分配单元160,在该示例中,该翘曲载荷分配单元160包括两个轴向对准的缸,第一缸169和第二缸170,各自通过相应的可移动构件(例如第一活塞171和第二活塞172)分成两个腔室165和167或168和166。两个可移动构件通过在该示例中穿过腔室167和168的杆173刚性地连接。左前翘曲导管161将翘曲载荷分配单元160的左前系统腔室165连接到左前压缩控制容积27。右前翘曲导管162将翘曲载荷分配单元160的右前系统腔室166连接到右前压缩控制容积28。左后翘曲导管163将翘曲载荷分配单元160的左后系统腔室167连接到左后压缩控制容积29。右后翘曲导管164将翘曲载荷分配单元160的右后系统腔室168连接到右后压缩控制容积30。为了左前和右后控制柱塞15和18压缩流
体并将其排入翘曲载荷分配单元160的左前和右后系统腔室165、168中,活塞杆组件(包括活塞171、172和杆173)在翘曲载荷分配单元160的缸169、170内移位,将流体从右前和左后系统腔室166和167移出到延伸的右前和左后控制柱塞16、17中。因此,翘曲载荷分配单元160去除了控制柱塞15、16、17、18的布置的翘曲刚度,而不去除侧倾、俯仰或升沉刚度。
109.图11示出了替代的翘曲载荷分配单元160,其中杆173穿过所有系统腔室。尽管所有系统腔室均显示有相等的有效活塞面积,但前压缩容积27、28连接到第一缸169,后压缩容积29和30连接到第二缸170。如果从第一缸169到第二缸170使用不同的孔口,则该连接序列是适合的。基本功能与图10中的翘曲载荷分配单元160相同。活塞杆组件(171、172、173)随翘曲运动而移动,以便将流体从第一对(左前和右后)对角压缩控制容积27、30移到第二对(右前和左后)对角压缩控制容积28、29。
110.此外,在图11中,控制柱塞15”、16”、17”、18”是双作用的,但与图3不同,它们现在具有不相等的活塞面积,即,杆仅穿过回弹腔室71、72、73、74,而不穿过压缩腔室19、20、21、22。其效果是,侧倾和俯仰的线性刚度率相等,并且都高于升沉刚度。分别显示了左前、右前、左后和右后流体压力蓄能器181、182、183、184,以提供受控的回弹力,示出了每个蓄能器均包括在气体容积和它连接的压缩控制容积之间的阻尼阀。尽管示出了悬架系统5被应用于诸如汽车或卡车之类的车辆的底盘2,但是该悬架系统同样适用于船舶。在该车辆示例中,柱塞所连接的四个点6、7、8、9分别位于相应的左前、右前、左后或右后车轮组件185、186、187、188上。
111.图12是图3中的右前控制柱塞16'的视图。杆204从活塞201的两侧延伸穿过压缩腔室20和回弹腔室72。如果杆的直径在活塞两侧相同,则活塞201的压缩面202上的压缩活塞面积(即压缩腔室的压力面积)等于活塞201的回弹面203上的回弹活塞面积(即回弹腔室的压力面积)。
112.图13示出了三腔柱塞210,其例如可以用于代替图3中的右前双作用控制柱塞16'和空气弹簧80。杆204延伸穿过第一缸213中的下部活塞211和压缩腔室20并且穿过第二缸214中的回弹腔室72,终止于上活塞212。如果第一缸和第二缸具有相等的直径,则控制压缩面202和控制回弹面203面积相等,提供与图3中的控制柱塞16'相同的功能,即具有零升沉刚度的控制柱塞。然而,三腔室柱塞210可从支撑压缩腔室216和流体压力蓄能器217提供升沉刚度,这两个元件是液压气动支撑柱塞或单作用缸221的关键元件。上部活塞212的支撑压缩面215与缸214的镗孔一起限定了支撑压缩腔室216,该支撑压缩腔室216经由可选的阻尼阀220连接至流体压力蓄能器217的流体容积219。压力蓄能器217的气体容积在218处指示。
113.图14示出了来自图9的组合的左前俯仰和控制柱塞。外部杆231是中空的以容纳左前控制柱塞131的压缩腔室19,并且包括在缸233中滑动以限定左前俯仰压缩腔室135和左前俯仰回弹腔室139的活塞232。穿过左前俯仰压缩腔室135进入中空外部杆231的是中空内杆234,通过中空内杆234在左前压缩控制室19和左前压缩导管23之间传递流。
114.图15示出了翘曲载荷分配单元160的一种替代布置,如果需要的话,其可以增加俯仰弹性。第一活塞245将第一缸241划分为左前系统腔室165和左前俯仰腔室251。第二活塞246将第二缸242划分为右前系统腔室166和右前俯仰腔室252。第三活塞247将第三缸243(与第一缸241轴向对准)划分为左后系统腔室167和左后俯仰腔室253。第四活塞248将第四
缸244(与第二缸242轴向对准)划分为左后系统腔室168和右后腔室254。左前和右前腔室251、252由前俯仰导管255连接,该前俯仰导管255可任选地连接到前俯仰流体压力蓄能器(未示出)。左后和右后俯仰腔室251、252通过后俯仰导管256连接,该后俯仰导管256可以可选地连接到前俯仰流体压力蓄压器(未示出)。可选的俯仰蓄能器可以在俯仰模式下增加回弹力,否则图15的翘曲载荷分配单元的工作方式与图9和10中的类似。可以切换俯仰回弹力(如果提供)。替代地,如果需要,可以连接图15的翘曲载荷分配单元,以提供额外的侧倾弹性。
115.图16示出了翘曲载荷分配单元160的另一替代布置,如果需要,其可以增加升沉弹性和/或调节。第一缸261与第一活塞267所在的第二缸262轴向对准。第一杆265固定到第一活塞267并延伸到第一缸261中,第一杆265与第一缸一起限定左前系统腔室165。第一活塞267、第一杆265和第二缸262一起限定右后系统腔室168。第一对角升沉腔室269在第一活塞267的相对侧上。
116.类似地,第三缸263与第四缸264轴向对准,第二活塞268位于第三缸263中。固定到第二活塞268并延伸到第四缸264中的是第二杆266,第二杆266与第四缸一起限定了右前系统腔室166。第二活塞268、第二杆266和第三缸263一起限定了左后系统腔室167。在第二活塞268的相对侧上是第二对角升沉腔室270。
117.两个升沉腔室269和270通过升沉导管连接,该升沉导管通过在第一对角对的柱塞(左前和右后控制柱塞)和第二对角对的柱塞(右前和左后控制柱塞)之间传递流体而允许控制柱塞(未示出)翘曲。相反,升沉导管允许来自两个升沉腔室269、270的流体经由可选的升沉阻尼阀273流入和流出至少一个可选的升沉流体压力蓄能器272。
118.如图所示,当图16的载荷分配单元在升沉调节蓄能器49和升沉导管271之间包括升沉可逆泵50时,可以如图2中那样调节底盘(未示出)的升沉位置。
119.一些图中的特征或元素可以应用于其他图中。例如,图10、11、15和16中的载荷分配单元是可互换的,也可以将其添加到图1、2、3和4中的悬架系统中。
120.图中的特征或元件也可以被等效或相似的特征或元件代替。例如,弹性支撑件可以是空气弹簧、扭杆、液压气动支柱或弹性支撑件的任何其他已知类型或组合。
121.可以使用任何形式的设备来与主体姿势的俯仰和侧倾控制配合使用来捕获,存储和释放能量,例如通过使用泵马达作为发电机或通过使用泵将流体驱动到一个或多个蓄能器中并根据需要释放以补充马达功率。
122.泵可以驱动流体放大器,该流体放大器位于对角导管中,以代替可逆泵。
123.可以在支撑柱塞上或在导管中提供阻尼。可替代地,可以在与支撑柱塞分离或平行的附加液压柱塞中提供阻尼。阻尼阀可直接设置在弹性上,例如在图1和图5至11中所示的蓄能器上。附加或替代地,阻尼阀可设置在控制柱塞上。这些阻尼阀中的任何一个或全部都可以固定(例如孔口或与垫片组合的孔口)。替代地,这些阻尼阀中的任何一个或全部可以在至少两个设置之间切换,例如(相对较软的)过渡设置和(相对较硬的)传递或游荡设置。替代地,这些阻尼阀中的任何一个或全部可以是可变阻尼阀。可切换的或可变的阻尼阀可被称为可控制的阻尼阀。
124.对于本领域技术人员显而易见的其他修改和变型被认为在本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

