1.本实用新型属于无人艇技术领域,具体涉及一种适用于复杂海况兼顾空中监测的半潜式无人艇。
背景技术:
2.海洋覆盖着地球表面百分之七十以上的面积,蕴藏着丰富的资源。有效适当的开发与利用海洋资源,发展并提高海洋经济,对我国经济可持续发展有着非常重要的作用,目前各个国家都在积极发展环境监测技术。无人艇凭借其用途广,智能程度高,隐身性能好,机动能力强,效费比高等特点,在民用和军用等方面已崭露头角。目前用于海洋环境监测的无人艇国内外主要研究方向在于水面无人艇,而常规的水面无人艇往往难以适用于复杂海况,而且其航行时间短、巡逻范围以及作业能力往往局限于海面以及海下两个空间维度。
技术实现要素:
3.本实用新型的目的在于提供一种适用于复杂海况兼顾空中监测的半潜式无人艇,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种适用于复杂海况兼顾空中监测的半潜式无人艇,包括半潜式艇体、太阳能与风能联合发电模块、水文信息采集模块、海空一体化监测模块和推进与控制模块,所述半潜式结构艇体包括下艇体、中部支柱和尾部支柱,所述中部支柱固定于下艇体的上部中间位置,所述尾部支柱固定于下艇体的尾部上部,所述中部支柱的上部两侧各固定安装有一个机翼,所述中部支柱的顶部安装有支柱顶板,所述尾部支柱的顶部安装有无人机平台;
5.所述太阳能与风能联合发电模块由柔性太阳能板、逆变器、水平式风力发电机、可充电蓄电池和电池支架组成,所述柔性太阳能板设置于中部支柱两侧的机翼的上表面,所述水平式风力发电机设置于支柱顶板的顶部,所述逆变器、可充电蓄电池和电池支架均设置于下艇体内部,所述可充电蓄电池通过电池支架固定与下艇体内部;
6.所述水文信息采集模块包括水温传感器、ph传感器、风速传感器和风向传感器,所述水温传感器和所述ph传感器均安装在下艇体的壳体的外表面上,所述风速传感器和风向传感器分别安装在两个机翼的上表面上;
7.所述海空一体化监测模块包括水面摄像头、水下摄像头、小型无人机和电磁吸盘,所述水面摄像头安装在支柱顶板的顶部表面上,所述水下摄像头安装在下艇体的头部壳体的外部下方,所述小型无人机放置于所述无人机平台上,所述电磁吸盘镶嵌在无人机平台的内部;
8.所述推进与控制模块包括主推进器、尾部侧推、首部侧推、控制器和信号传输天线,所述主推进器安装于下艇体的尾端的中部,所述尾部侧推安装于下艇体尾部一侧,所述首部侧推设置有两个并分别安装于下艇体的头部的两侧,所述控制器安装于下艇体的内部,所述信号传输天线安装于支柱顶板的顶部。
9.优选的,所述柔性太阳能板和水平式风力发电机均通过导线与逆变器电性连接,所述逆变器通过导线与可充电蓄电池电性连接。
10.优选的,所述水温传感器、ph传感器、风速传感器和风向传感器均通过导线与控制器电性连接。
11.优选的,所述下艇体设置为扁平式形状,所述中部支柱和尾部支柱均设置为naca型机翼的形状。
12.优选的,所述柔性太阳能板为单晶硅太阳能板并采用聚光式方阵的排版形式布置,所述逆变器的型号为dc
‑
ac。
13.与现有技术相比,本实用新型的有益效果是:本实用新型以无人艇为载体,下艇体设置为扁平式形状,中部支柱和尾部支柱均设置为naca型机翼的形状,使得本实用新型受到较小的阻力且重心远远小于浮心,具有极强的抗倾覆能力,进而能够在复杂海域正常航行以及作业,本实用新型的太阳能与风能联合发电模块,该模块可以将太阳能和风能转化为电力存储在可充电蓄电池中,可充电蓄电池为本实用新型中的各类用电设备进行供电,有利于提高无人艇的续航能力和作业时间,本实用新型还增加了小型无人机作业模块,通过电磁吸盘产生的吸附力可以辅助小型无人机降落,通过小型无人机可以增加无人艇的巡航范围,同时小型无人机的俯视视角可以在复杂海域环境中为无人艇提供保护。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
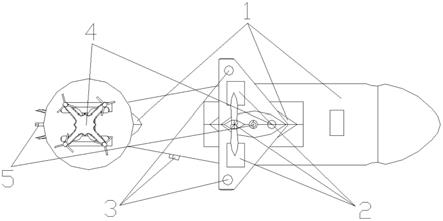
15.图1是本实用新型的整体俯视结构示意图;
16.图2是本实用新型的整体侧视结构示意图;
17.图3是本实用新型的整体斜视结构示意图;
18.图4是本实用新型的整体主视结构示意图。
19.图中:1、半潜式艇体;1
‑
1、下艇体;1
‑
2、中部支柱;1
‑
3、机翼;1
‑
4、支柱顶板;1
‑
5、尾部支柱;1
‑
6、无人机平台;2、太阳能与风能联合发电模块;2
‑
1、柔性太阳能板;2
‑
2、可充电蓄电池;2
‑
3、逆变器;2
‑
4、水平式风力发电机;2
‑
5、电池支架;3、水文信息采集模块;3
‑
1、水温传感器;3
‑
2、ph传感器;3
‑
3、风速传感器;3
‑
4、风向传感器;4、海空一体化监测模块;4
‑
1、水面摄像头;4
‑
2、水下摄像头;4
‑
3、小型无人机;4
‑
4、电磁吸盘;5、推进与控制模块;5
‑
1、主推进器;5
‑
2、尾部侧推;5
‑
3、首部侧推;5
‑
4、控制器;5
‑
5、信号传输天线。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.在本实用新型的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操
作,因此不能理解为对本实用新型的限制。
22.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
23.请参阅图1
‑
图4,本实用新型提供一种技术方案:一种适用于复杂海况兼顾空中监测的半潜式无人艇,包括半潜式艇体1、太阳能与风能联合发电模块2、水文信息采集模块3、海空一体化监测模块4和推进与控制模块5,半潜式结构艇体1包括下艇体1
‑
1、中部支柱1
‑
2和尾部支柱1
‑
5,中部支柱1
‑
2固定于下艇体1
‑
1的上部中间位置,尾部支柱1
‑
5固定于下艇体1
‑
1的尾部上部,中部支柱1
‑
2的上部两侧各固定安装有一个机翼1
‑
3,中部支柱1
‑
2的顶部安装有支柱顶板1
‑
4,尾部支柱1
‑
5的顶部安装有无人机平台1
‑
6,太阳能与风能联合发电模块2由柔性太阳能板2
‑
1、逆变器2
‑
3、水平式风力发电机2
‑
4、可充电蓄电池2
‑
2和电池支架2
‑
5组成,柔性太阳能板2
‑
1设置于中部支柱1
‑
2两侧的机翼1
‑
3的上表面,水平式风力发电机2
‑
4设置于支柱顶板1
‑
4的顶部,逆变器2
‑
3、可充电蓄电池2
‑
2和电池支架2
‑
5均设置于下艇体1
‑
1内部,可充电蓄电池2
‑
2通过电池支架2
‑
5固定与下艇体1
‑
1内部,水文信息采集模块3包括水温传感器3
‑
1、ph传感器3
‑
2、风速传感器3
‑
3和风向传感器3
‑
4,水温传感器3
‑
1和ph传感器3
‑
2均安装在下艇体1
‑
1的壳体的外表面上,风速传感器3
‑
3和风向传感器3
‑
4分别安装在两个机翼1
‑
3的上表面上,海空一体化监测模块4包括水面摄像头4
‑
1、水下摄像头4
‑
2、小型无人机4
‑
3和电磁吸盘4
‑
4,水面摄像头4
‑
1安装在支柱顶板1
‑
4的顶部表面上,水下摄像头4
‑
2安装在下艇体1
‑
1的头部壳体的外部下方,小型无人机4
‑
3放置于无人机平台1
‑
6上,电磁吸盘4
‑
4镶嵌在无人机平台1
‑
6的内部,推进与控制模块5包括主推进器5
‑
1、尾部侧推5
‑
2、首部侧推5
‑
3、控制器5
‑
4和信号传输天线5
‑
5,主推进器5
‑
1安装于下艇体1
‑
1的尾端的中部,尾部侧推5
‑
2安装于下艇体1
‑
1尾部一侧,首部侧推5
‑
3设置有两个并分别安装于下艇体1
‑
1的头部的两侧,控制器5
‑
4安装于下艇体1
‑
1的内部,信号传输天线5
‑
5安装于支柱顶板1
‑
4的顶部,控制器5
‑
4通过信号输送天线5
‑
5将水文数据发送至陆地基站,小型无人机4
‑
3自带摄像头以及wi
‑
fi模块,wi
‑
fi模块与信号传输天线5
‑
5同频,小型无人机4
‑
3可由陆地基站操控以及调取小型无人机4
‑
3所监测的画面,当控制器5
‑
4收到小型无人机4
‑
3的降落请求时,控制器5
‑
4启动电磁吸盘4
‑
4,电磁吸盘4
‑
4运行产生电磁吸附力,可以辅助小型无人机4
‑
3降落,主推进器5
‑
1、尾部侧推5
‑
2和首部侧推5
‑
3均通过控制器5
‑
4进行调节控制,控制器5
‑
4可以自主控制无人艇移动,陆地基站也可以输送无线电信号通过信号输送天线5
‑
5来遥控无人艇移动。
24.本实施例中,优选的,柔性太阳能板2
‑
1和水平式风力发电机2
‑
4均通过导线与逆变器2
‑
3电性连接,逆变器2
‑
3通过导线与可充电蓄电池2
‑
2电性连接,逆变器2
‑
3可以将柔性太阳能板2
‑
1和水平式风力发电机2
‑
4产生的电力输送给可充电蓄电池2
‑
2进行存储,可充电蓄电池2
‑
2为无人艇以及其搭载的各种传感器提供能源,增加无人艇的巡航时间和范围。
25.本实施例中,优选的,水温传感器3
‑
1、ph传感器3
‑
2、风速传感器3
‑
3和风向传感器3
‑
4均通过导线与控制器5
‑
4电性连接。
26.本实施例中,优选的,下艇体1
‑
1设置为扁平式形状,中部支柱1
‑
2和尾部支柱1
‑
5均设置为naca型机翼的形状,最大程度减少阻力,抗倾覆能力较强,满足半潜式结构设计要求,能在复杂海域正常航行。
27.本实施例中,优选的,柔性太阳能板2
‑
1为单晶硅太阳能板并采用聚光式方阵的排版形式布置,逆变器2
‑
3的型号为dc
‑
ac。
28.本实用新型工作原理及使用流程:本实用新型以无人艇为载体,下艇体1
‑
1设置为扁平式形状,中部支柱1
‑
2和尾部支柱1
‑
5均设置为naca型机翼的形状,使得本实用新型受到较小的阻力且重心远远小于浮心,具有极强的抗倾覆能力,进而能够在复杂海域正常航行以及作业,本实用新型的太阳能与风能联合发电模块2,该模块可以将太阳能和风能转化为电力存储在可充电蓄电池2
‑
2中,可充电蓄电池2
‑
2为本实用新型中的各类用电设备进行供电,有利于提高无人艇的续航能力和作业时间,本实用新型还增加了小型无人机作业模块,通过电磁吸盘4
‑
4产生的吸附力可以辅助小型无人机4
‑
3降落,通过小型无人机4
‑
3可以增加无人艇的巡航范围,同时小型无人机4
‑
3的俯视视角可以在复杂海域环境中为无人艇提供保护。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

