1.本实用新型涉及施工设备领域,具体是一种智能振捣装置的转向调节机构。
背景技术:
2.现有振捣技术多数都不能深入到深度极大的场合,虽然人工振捣方式,可让工人到结构底部,但大多数结构内部错综复杂,钢筋排布极其不规律,且结构下方工作环境恶劣,留给施工人员的工作空间几乎没有,且有些结构形状奇特,靠工人拿着振捣棒去震这些结构的边边角角,将会极其困难,若依靠其余振捣方式,如附着式振捣等方法,对于一些重要的结构,将达不到它的设计强度要求,且采用人工振捣出现的这些问题也终将会对工程质量造成极大的损伤,给人民带来极大的危害。在对于闸室墙的振捣过程中,因为闸室墙深度过大,且夏季冬季闸室墙内温度极端,极其造成生命财产安全危险,故迫切需要一种可远距离、不依靠人力去握住的振捣方式。
3.即,现有技术为人力控制振捣棒的位置,造成了如下缺点:
4.1、当采用高频振捣时,人手握在振捣棒上,将会对人的身体安全产生损害。
5.2、若高频振捣时人手没有把握住,一方面将会对振捣棒造成损害,另一方面如果出现漏电危险,工业用电330v足以致命。
6.3、人力不能对每一处进行振捣,对于一些死角,人力将会无从下手。
7.4、人力判断混凝土强度是否达标,依靠肉眼观看是否有气泡产生,但这种方式,将大概率导致过震或漏震。
8.5、对于一些危险平面和特殊平面,人力将无法到达,所以这些地方将会漏震。
技术实现要素:
9.本实用新型的目的在于提供一种智能振捣装置的转向调节机构,以解决上述背景技术中提出的问题。为实现上述目的,本实用新型提供如下技术方案:
10.一种智能振捣装置的转向调节机构,包括转向调节机构主体;
11.所述转向调节机构主体通过蜗杆上下移动装置安装在智能振捣装置上,并利用蜗杆上下移动装置和蜗杆上下移动装置上设有的蜗杆进行转动上下调整完成工作;
12.其中,所述转向调节机构主体上设有自锁套筒,自锁套筒通过转动副安装,自锁套筒与转动副转动连接;
13.该机构还包括铰链电机,通过所述铰链电机自动调整转向调节机构主体的角度。
14.采用上下移动装置代替工人上下移动,且转向调节机构主体可以到达任意平面,将不再存在某一平面漏震的现象;采用转向调节机构主体,一方面振捣棒可运动到一些死角进行振捣;另一方面通过铰链电机,配合蜗杆自身转动,可实现单位面积内的自动化振捣;避免了人工操作,实现了适用性高、安全性高和工作效果高的优点。
15.在本实用新型智能振捣装置的转向调节机构中:所述蜗杆上下移动装置上设有齿轮传动组件,并通过齿轮传动组件动力传动在蜗杆上进行螺纹传动,带动蜗杆转动升降。使
得转向调节机构主体可以到达任意平面,将不再存在某一平面漏震的现象。
16.进一步的方案:所述齿轮传动组件上设有齿轮副和蜗轮,蜗轮啮合在蜗杆,齿轮副带动蜗轮和蜗杆配合进行蜗杆螺纹转动升降。
17.优选的:所述蜗轮固定在转轴上,并通过转轴转动连接在蜗杆上下移动装置上;
18.齿轮副设置在转轴上,并由动力装置提供动力。
19.所述齿轮副包含有呈啮合状的直尺圆柱齿轮ⅰ和直尺圆柱齿轮ⅱ,直尺圆柱齿轮ⅱ固定在转轴上;直尺圆柱齿轮ⅰ固定在动力装置上。
20.所述动力装置为电机。
21.在本实用新型智能振捣装置的转向调节机构中:所述转动副固定在蜗杆上设有的蜗杆末端杆上。
22.在本实用新型智能振捣装置的转向调节机构中:所述转动副上设有两个呈平行状的直杆。
23.本实用新型的另一个目的是提供一种智能振捣装置的转向调节机构的使用方法,包括以下步骤:
24.1)、待智能振捣装置组装完毕后,最后安装末端转向调节机构;
25.2)、根据实际尺寸和要求进行零件设计和组装;
26.3)、通过电机和齿轮传动,带动蜗杆进行旋转以实现振捣棒的水平面转向和振捣棒上下移动;
27.4)、通过控制转向调节机构主体相对于蜗杆上表面的距离来控制振捣棒转动的角度;通过需要转动的角度来确定铰链应该收缩或散开的距离,通过铰链电机带动链轮来实现链轮的收缩和放线;
28.5)、待上述零件组装调试完毕后,进行工作:
[0029]5‑
1)、待智能振捣装置移动到指定位置后,启动电机,使得蜗杆移动到需要振捣的竖直面位置和水平面位置;
[0030]5‑
2 )、启动铰链电机,使得振捣棒在竖直面内位置确定并进行此平面180度的振捣;
[0031]5‑
3 )、启动振捣棒开关进行振捣;
[0032]5‑
4 )、待该处混凝土达到设计要求强度后,启动电机反转,重复上述操作。
[0033]
与现有技术相比,本实用新型智能振捣装置的转向调节机构,包括转向调节机构主体;所述转向调节机构主体通过蜗杆上下移动装置安装在智能振捣装置上,并利用蜗杆上下移动装置和蜗杆上下移动装置上设有的蜗杆进行转动上下调整完成工作;其中,所述转向调节机构主体上设有自锁套筒,自锁套筒通过转动副安装,自锁套筒与转动副转动连接;该机构还包括铰链电机,通过所述铰链电机自动调整转向调节机构主体的角度;采用上下移动装置代替工人上下移动,且转向调节机构主体可以到达任意平面,将不再存在某一平面漏震的现象;采用转向调节机构主体,一方面振捣棒可运动到一些死角进行振捣;另一方面通过铰链电机,配合蜗杆自身转动,可实现单位面积内的自动化振捣;避免了人工操作,实现了适用性高、安全性高和工作效果高的优点。
附图说明
[0034]
图1为本实用新型安装在智能振捣装置上的结构示意图。
[0035]
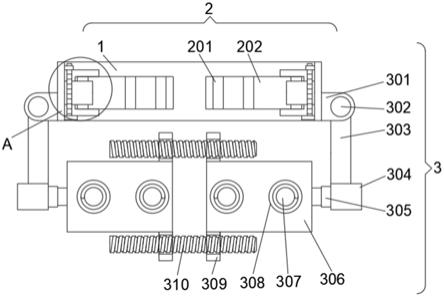
图2为本实用新型转向调节机构中蜗杆上下移动装置的结构示意图。
[0036]
图3为本实用新型转向调节机构中转向调节机构主体的结构示意图。
[0037]
图中:
[0038]1‑
蜗杆上下移动装置;2
‑
智能振捣装置;3
‑
蜗杆;4
‑
转向调节机构主体;
[0039]
11
‑
蜗轮;12
‑
转轴;13
‑
电机;14
‑
直尺圆柱齿轮ⅰ;15
‑
直尺圆柱齿轮ⅱ;
[0040]
31
‑
蜗杆末端杆;
[0041]
41
‑
转动副;42
‑
直杆;43
‑
自锁套筒。
具体实施方式
[0042]
下面结合具体实施方式对本实用新型的技术方案作进一步详细地说明。
[0043]
本实用新型的目的在于提供一种智能振捣装置的转向调节机构,以解决上述背景技术中提出的问题。为实现上述目的,本实用新型提供如下技术方案:
[0044]
本实用新型实施例中,如图1
‑
3所示,一种智能振捣装置的转向调节机构,包括转向调节机构主体4;所述转向调节机构主体4通过蜗杆上下移动装置1安装在智能振捣装置2上,并利用蜗杆上下移动装置1和蜗杆上下移动装置1上设有的蜗杆3进行转动上下调整完成工作;其中,所述转向调节机构主体4上设有自锁套筒43,自锁套筒43通过转动副41安装,自锁套筒43与转动副41转动连接;该机构还包括铰链电机,通过所述铰链电机自动调整转向调节机构主体4的角度。
[0045]
本实用新型实施例中,采用上下移动装置1代替工人上下移动,且转向调节机构主体4可以到达任意平面,将不再存在某一平面漏震的现象;采用转向调节机构主体4,一方面振捣棒可运动到一些死角进行振捣;另一方面通过铰链电机,配合蜗杆3自身转动,可实现单位面积内的自动化振捣;避免了人工操作,实现了适用性高、安全性高和工作效果高的优点。
[0046]
解决了现有技术为人力控制振捣棒的位置,造成的如下缺点:当采用高频振捣时,人手握在振捣棒上,将会对人的身体安全产生损害;若高频振捣时人手没有把握住,一方面将会对振捣棒造成损害,另一方面如果出现漏电危险,工业用电330v足以致命;人力不能对每一处进行振捣,对于一些死角,人力将会无从下手;人力判断混凝土强度是否达标,依靠肉眼观看是否有气泡产生,但这种方式,将大概率导致过震或漏震;对于一些危险平面和特殊平面,人力将无法到达,所以这些地方将会漏震。
[0047]
本实用新型实施例中,如图1
‑
3所示,所述蜗杆上下移动装置1上设有齿轮传动组件,并通过齿轮传动组件动力传动在蜗杆3上进行螺纹传动,带动蜗杆3转动升降。使得转向调节机构主体4可以到达任意平面,将不再存在某一平面漏震的现象。具体的,所述齿轮传动组件上设有齿轮副和蜗轮11,蜗轮11啮合在蜗杆3,齿轮副带动蜗轮11和蜗杆3配合进行蜗杆3螺纹转动升降。所述蜗轮11固定在转轴12上,并通过转轴12转动连接在蜗杆上下移动装置1上;齿轮副设置在转轴12上,并由动力装置提供动力。
[0048]
所述齿轮副包含有呈啮合状的直尺圆柱齿轮ⅰ14和直尺圆柱齿轮ⅱ15,直尺圆柱齿轮ⅱ15固定在转轴12上;直尺圆柱齿轮ⅰ14固定在动力装置上。所述动力装置为电机13。
[0049]
本实用新型实施例中,如图1
‑
3所示,所述转动副41固定在蜗杆3上设有的蜗杆末端杆31上;所述转动副41上设有两个呈平行状的直杆42。
[0050]
本实用新型实施例中,另外提供一种智能振捣装置的转向调节机构的使用方法,包括以下步骤:
[0051]
1)、待智能振捣装置组装完毕后,最后安装末端转向调节机构;
[0052]
2)、根据实际尺寸和要求进行零件设计和组装;
[0053]
3)、通过电机13和齿轮传动,带动蜗杆3进行旋转以实现振捣棒的水平面转向和振捣棒上下移动;
[0054]
4)、通过控制转向调节机构主体4相对于蜗杆3上表面的距离来控制振捣棒转动的角度;通过需要转动的角度来确定铰链应该收缩或散开的距离,通过铰链电机带动链轮来实现链轮的收缩和放线;
[0055]
5)、待上述零件组装调试完毕后,进行工作:
[0056]5‑
1)、待智能振捣装置移动到指定位置后,启动电机13,使得蜗杆3移动到需要振捣的竖直面位置和水平面位置;
[0057]5‑
2 )、启动铰链电机,使得振捣棒在竖直面内位置确定并进行此平面180度的振捣;
[0058]5‑
3 )、启动振捣棒开关进行振捣;
[0059]5‑
4 )、待该处混凝土达到设计要求强度后,启动电机13反转,重复上述操作。
[0060]
与现有技术相比,本实用新型智能振捣装置的转向调节机构,包括转向调节机构主体4;所述转向调节机构主体4通过蜗杆上下移动装置1安装在智能振捣装置2上,并利用蜗杆上下移动装置1和蜗杆上下移动装置1上设有的蜗杆3进行转动上下调整完成工作;其中,所述转向调节机构主体4上设有自锁套筒43,自锁套筒43通过转动副41安装,自锁套筒43与转动副41转动连接;该机构还包括铰链电机,通过所述铰链电机自动调整转向调节机构主体4的角度;采用上下移动装置1代替工人上下移动,且转向调节机构主体4可以到达任意平面,将不再存在某一平面漏震的现象;采用转向调节机构主体4,一方面振捣棒可运动到一些死角进行振捣;另一方面通过铰链电机,配合蜗杆3自身转动,可实现单位面积内的自动化振捣;避免了人工操作,实现了适用性高、安全性高和工作效果高的优点。
[0061]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
[0062]
上面对本实用新型的较佳实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。