1.本发明涉及全息成像技术领域,尤其涉及一种全息成像装置及其成像方法。
背景技术:
2.全息投影技术(front
‑
projected ho l ographic d i sp l ay)也称虚拟成像技术是利用干涉和衍射原理记录并再现物体真实的三维图像的技术。全息投影技术不仅可以产生立体的空中幻像,还可以使幻像与表演者产生互动,一起完成表演,产生令人震撼的演出效果。适用范围产品展览、汽车服装发布会、舞台节目、互动、酒吧娱乐、场所互动投影等。
3.全息投影技术与现有投影技术在原理上截然不同,其利用干涉衍射原理将光引导至所需的地方,而非遮挡光,因而在投影特殊图案时亮度可以达到普通投影的数十倍甚至上千倍。
4.目前的全息成像系统存在以下缺点:
5.1)需要在全息膜下方的地面做地面下沉,实际应用中很多场地不具备应用条件。
6.2)背景画面是通过灯光照亮下沉地面形成的空间,背景画面上不能显示影像。
7.3)下沉地面所形成的空间,可以被观看者直接观看到,破坏了该装置的视觉呈现效果。
8.4)顶部及两侧是开放的,空间中的环境光线很容易对下沉地面的空间进行干扰,影响该装置视觉呈现效果。
技术实现要素:
9.为克服上述背景技术中提出的问题中至少一项,本发明提供一种全息成像装置及其成像方法,从而降低对应用环境的要求,实现理想的视觉呈现效果。
10.根据本发明实施例的第一方面,提供一种全息成像装置,包括:长方形框架、第一显示屏、平面结构和第二显示屏;
11.所述长方形框架,与地面呈预设倾角设置,所述框架上固定有全息膜;
12.所述第一显示屏,设置在所述长方形框架的第一侧,垂直于地面设置,用于显示前景画面;
13.所述平面结构,所述平面结构设置于所述长方形框架的第二侧,包括第一平面、第二平面和第三平面,其中,所述第一平面、所述第二平面和所述第三平面呈预设角度顺序连接在一起,所述第三平面与所述长方形框架的底端相连;
14.所述第二显示屏,设置于所述第二平面上,用于显示背景画面。
15.在一个实施例中,优选地,所述第一平面和所述第二平面之间的夹角为∠c,∠c=90
°
所述第一平面的上沿与所述第三平面的下沿连接的辅助面d与所述长方形框架的夹角为∠b,所述长方形框架与所述第一显示屏之间的的夹角为∠b’,∠b=∠b’,所述辅助面d与所述第三平面之间的夹角为∠a,∠a=90
°‑
∠b
‑
∠b’=90
°‑
2∠b,所述辅助面d平行于所述第二平面,所述第二平面和所述第三平面之间的夹角为∠d,∠d=180
°‑
∠a。
16.在一个实施例中,优选地,所述辅助面d的长度小于等于所述第一显示屏的高度。
17.在一个实施例中,优选地,所述第一平面的长度=(辅助面d的长度
‑
第二平面的长度)
×
tan∠a。
18.在一个实施例中,优选地,所述第三平面的长度=(辅助面d的长度
‑
第二平面的长度)/cos∠a。
19.在一个实施例中,优选地,所述第二平面的长度等于所述辅助面d的长度的一半。
20.在一个实施例中,优选地,所述长方形框架的两个侧边分别通过第一夹板、第二夹板,第三夹板和第四夹板夹住所述长方形框架,并与所述第一显示屏和所述平面结构连接。
21.在一个实施例中,优选地,所述装置还包括:顶部封板,所述顶部封板连接在所述第一显示屏的顶部和所述长方形框架的顶部之间,以使顶部封闭。
22.根据本发明实施例的第二方面,提供一种全息成像装置的成像方法,用于上述第一方面实施例中任一项所述的全息成像装置,所述方法包括:
23.通过第一显示屏显示前景画面影像,通过第二显示屏显示背景画面影像,所述背景画面影像的光以及平面结构形成的空间反射出的光入射到全息膜上,并由从全息膜反射的光形成虚像,所述虚像位于所述全息膜的后方。
24.在一个实施例中,优选地,还包括升降机构,所述升降机构包括:
25.安装座,所述安装座上方设置第一水平安装板,所述第一水平安装板上端用于安装待升降器件;
26.若干第一电动伸缩杆,上端沿所述第一水平安装板下端周侧均匀布置,且所述第一电动伸缩杆下端固定连接在所述安装座上端;
27.第一竖直导向杆,固定连接在所述第一水平安装板下端中部,所述第一竖直导向杆下端贯穿至所述安装座内;
28.第一限位组件,固定连接在所述安装座内上部,且位于第一竖直导向杆一侧;
29.第二限位及缓冲组件,设置在所述第一竖直导向杆下部;
30.所述第二限位及缓冲组件包括:
31.第一水平连接杆,固定套接在所述第一竖直导向杆下部,且所述第一水平连接杆左右两端与所述安装座左右两侧壁上下滑动连接;
32.两个上下间隔的第一缓冲组,所述第一缓冲组包括:第一安装壳,左右两端贯通;缓冲气囊,设置在所述第一安装壳内,所述缓冲气囊连接微型电动抽充气泵,所述微型电动抽充气泵设置在所述安装座内;两个左右对称的连接组;
33.所述连接组包括:第一水平导向杆,沿左右方向布置,且一端与所述第一安装壳外壁固定连接,另一端与所述安装座内壁固定连接;第一竖直连接板,设置在所述缓冲气囊左侧或右侧、且左右滑动连接在所述第一安装壳内;两个上下对称的第一连接杆,一端分别连接在所述第一竖直连接板上部及下部,另一端与第一滑块连接,所述第一滑块滑动套接在所述第一水平导向杆上;第一弹簧,套接在所述第一水平导向杆上,所述第一弹簧一端与所述第一安装壳固定连接,另一端与所述第一滑块固定连接;第二连接杆,一端与所述第一滑块转动连接,另一端与所述第一水平连接杆转动连接;
34.所述第二限位及缓冲组件还包括:第二竖直连接杆,上下端分别与两个第一缓冲组的对应侧的第一滑块固定连接。
35.在一个实施例中,优选的,所述装置还包括:评估报警装置,设置于所述第一显示屏上,用于评估所述第一显示屏上所显示的前景画面图像的图像质量,根据评估结果发出报警提示,其步骤包括:
36.采集第一显示屏上显示的前景画面图像;
37.获取采集的所述前景画面图像的图像特征,基于所述图像特征,获得采集的前景画面图像的配置文件;
38.根据所述配置文件确定前景画面图像在第一显示屏上的预设显示图标;
39.将采集的所述前景画面图像输入到预设语义分割网络中,基于深度逻辑关系,确定前景画面图像在第一显示屏上的当前显示图标;
40.计算所述前景画面图像在第一显示屏上的当前显示图标与预设显示图标的偏差度;
41.根据所述偏差度确认前景画面图像显示相对于前景画面图像的图像质量的影响因子;
42.检测所述第一显示屏所处当前环境的目标环境参数,根据所述目标环境参数确认环境光线相对于前景画面图像的图像质量的影响因子;
43.根据前景画面图像在第一显示屏上的当前显示图标与预设显示图标的偏差度构建前景画面图像显示偏移角度直方图;
44.根据所述前景画面图像显示偏移角度直方图利用预设显示角度先验模型获得采集的前景画面图像的边缘质量得分;
45.获取采集的所述前景画面图像的当前像素值,利用预设损失函数确定当前像素值中的降质像素值;
46.构建所述降质像素值在前景画面图像的当前像素值中的概率分布;
47.根据所述降质像素值在前景画面图像的当前像素值中的概率分布获得采集的前景画面图像的纹理质量得分;
48.根据所述前景画面图像的纹理质量得分和边缘质量得分以及前景画面图像显示相对于前景画面图像的图像质量的影响因子和环境光线相对于前景画面图像的图像质量的影响因子综合计算出前景画面图像的最终图像质量分数;
49.确认所述最终图像质量分数是否大于等于预设分数,若是,确认所述前景画面图像的图像质量合格,无需进行后续操作,否则,确认所述前景画面图像的图像质量不合格,发出报警提示。
50.在一个实施例中,优选的,所述平面结构还包括:
51.获取模块,用于按帧获取在所述第一平面显示的第一图像、在所述第二平面显示的第二图像和在所述第三平面显示的第三图像;
52.划分模块,用于将所述第一图像、所述第二图像和所述第三图像进行预设行列的划分,分别获得n行m列的第一子图像、第二子图像、第三子图像;
53.第一计算模块,用于基于n行m列的所述第一子图像、所述第二子图像和所述第三子图像的对应图像参数值,计算出n行m列的所述第一子图像、所述第二子图像和所述第三子图像的图像显示评估值:
[0054][0055]
式中,t∈[1,3],且t表示所述第t图像,i表示预设行数,且取值范围为[1,n],j表示预设列数,且取值范围为[1,m],为所述第t图像中第i行第j列对应的第t子图像的的图像显示评估值,y
tij
为所述第t图像中第i行第j列对应的第t子图像的图像参数值,σ
′
tij
为所述第t图像中第i行第j列对应的第t子图像的像素参数权重值,a
tij
为所述第t图像中第i行第j列对应的第t子图像的像素参数的转换值,σ
″
tij
为所述第t图像中第i行第j列对应的第t子图像的亮度参数权重值,b
tij
为所述第t图像中第i行第j列对应的第t子图像的亮度参数的转换值,σ
″′
tij
为所述第t图像中第i行第j列对应的第t子图像的色彩参数权重值,c
tij
为所述第t图像中第i行第j列对应的第t子图像的色彩参数的转换值,exp()为以自然常数e为底的指数函数,且e的取值为2.72;
[0056]
第二计算模块,用于基于n行m列的所述第一子图像、所述第二子图像和所述第三子图像的图像显示评估值,计算所述平面结构上的显示图像当前帧的衔接度:
[0057][0058]
式中,ε为所述平面结构上的显示图像当前帧的衔接度,()
max
为取最大值,()
min
为取最小值;
[0059]
监控模块,用于基于所述平面结构上的显示图像预设帧数对应的衔接度和以下公式,获得所述平面结构的显示性能指数ω,当所述显示性能指数ω不满足要求时,发出报警信息;
[0060][0061]
式中,ω为所述平面结构的显示性能指数,p为所述平面结构上的显示图像的帧序数,ε
p
为所述平面结构上的显示图像第p帧的衔接度,p为所述平面结构上的显示图像预设帧数的总帧数。
[0062]
本发明的实施例提供的技术方案可以包括以下有益效果:
[0063]
1)不需要下沉地面,降低对应用环境的要求。
[0064]
2)背景画面不仅仅是立体空间的视觉呈现,还可以显示画面影像。
[0065]
3)通过结构设计对全息膜下方空间进行遮蔽,实现理想的视觉效果。
[0066]
4)通过对全息结构两侧、正面、顶面的遮挡结构,限制进入全息结构内部的光线强度,呈现更好的视觉效果。
[0067]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
[0068]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施
例,并与说明书一起用于解释本发明的原理。
[0069]
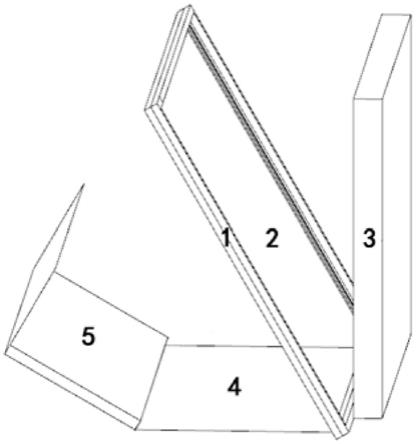
图1是根据一示例性实施例示出的一种全息成像装置的结构示意图。
[0070]
图2是根据一示例性实施例示出的全息成像装置使用时的成像示意图。
[0071]
图3和图4是根据一示例性实施例示出的不同角度时全息成像装置的成像示意图。
[0072]
图5是根据一示例性实施例示出的一种全息成像装置的结构示意图。
[0073]
图6是根据一示例性实施例示出的另一种全息成像装置的结构示意图。
[0074]
图7为根据一示例性实施例示出的一种升降机构的结构示意图。
[0075]
图8为图7在a部位的局部放大示意图。
具体实施方式
[0076]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
[0077]
图1是根据一示例性实施例示出的一种全息成像装置的结构示意图。
[0078]
如图1所示,全息成像装置,包括:长方形框架1、第一显示屏3、平面结构4和第二显示屏5;
[0079]
所述长方形框架1,与地面呈预设倾角设置,所述长方形框架上固定有全息膜2;全息膜2是一种具有特殊化学图层的薄膜。具备较强的反射率可以用于影像的反射,同时具备很高的透明度。
[0080]
所述第一显示屏3,设置在所述长方形框架1的第一侧,垂直于地面设置,用于显示前景画面;
[0081]
所述平面结构4,所述平面结构4设置于所述长方形框架1的第二侧,包括第一平面a、第二平面b和第三平面c,其中,所述第一平面a、所述第二平面b和所述第三平面c呈预设角度顺序连接在一起,所述第三平面c与所述长方形框架1的底端相连;
[0082]
所述第二显示屏5,设置于所述第二平面b上,用于显示背景画面。
[0083]
如图2所示,在一个实施例中,优选地,所述第一平面a和所述第二平面b之间的夹角为∠c,∠c=90
°
所述第一平面a的上沿与所述第三平面c的下沿连接的辅助面d与所述长方形框架1的夹角为∠b,所述长方形框架1与所述第一显示屏3之间的的夹角为∠b’,∠b=∠b’,所述辅助面d与所述第三平面c之间的夹角为∠a,∠a=90
°‑
∠b
‑
∠b’=90
°‑
2∠b,所述辅助面d平行于所述第二平面b,所述第二平面b和所述第三平面c之间的夹角为∠d,∠d=180
°‑
∠a。
[0084]
在一个实施例中,优选地,所述辅助面d的长度小于等于所述第一显示屏的高度。
[0085]
在一个实施例中,优选地,所述第一平面a的长度=(辅助面d的长度
‑
第二平面的长度)
×
tan∠a。
[0086]
在一个实施例中,优选地,所述第三平面c的长度=(辅助面d的长度
‑
第二平面的长度)/cos∠a。
[0087]
在一个实施例中,优选地,所述第二平面b的长度等于所述辅助面d的长度的一半。
[0088]
在该实施例中,如图2所示,在长方形框架1与led显示屏3之间形成的夹角为∠b’。
在全息膜2下方有一平面结构4。因为平面结构4通过全息膜2的反射,会在全息膜2另外一侧镜像的位置呈现出与平面结构4完全一样的虚像。所以当平面结构4与框架1之间的夹角∠b=∠b’时,平面结构4的辅助面d会与显示屏3完全重合。如图3和图4所示,如果∠b<∠b’,则反射的虚像平面结构4会向前倾斜,辅助面d无法与显示屏3重合在一起。如果∠b>∠b’,则反射的虚像平面结构4会向后倾斜,辅助面d也无法与显示屏3重合在一起。所以,本技术方案只有在∠b=∠b’时,才能呈现出理想的显示效果。
[0089]
平面结构4由a、b、c三个等宽平面呈一定角度连接到一起组合而成,平面a与平面b之间的夹角∠c为90
°
;平面b平行于辅助面d;因为平面b平行于辅助面d。所以平面b与平面c之间的夹角∠d=180
°‑
∠a;平面c与辅助面d之间的夹角∠a=90
°‑
∠b
‑
∠b’=90
°‑
2∠b;平面结构4中平面a的上沿与平面c的下沿连接的辅助面d的长度要≤led显示屏3的高度;平面结构4的宽度≤全息膜2的宽度;在平面b与平面c的连接点处做一个平行于平面a,宽度等于平面a的辅助面a”,因为a∥a”、∠c=90
°
,所以a
”⊥
平面b。因为平面b∥辅助面d,所以a
”⊥
辅助面d、a”的长度=a的长度。根据三角函数可以得知,平面a的长度=平面a”的长度=(平面d的长度
‑
平面b的长度)
×
tan∠a。s i n∠a=e/辅助面d的长度;平面c的长度=(平面d的长度
‑
平面b的长度)/cos∠a。平面b的长度从视觉效果考虑一般为辅助面d长度的一半。在平面b上安装一led显示屏5。
[0090]
下面举例说明如何通过以上公式推导出该全息结构的各部分尺寸。
[0091]
假设通过该结构希望设计一个可以显示虚拟接待员影像的全息接待台。则显示屏3的高度从完整显示一个正常人身高以及挥手等正常动作的角度,设定为2.2米,所以平面结构4的辅助面d的长度也设定为2.2米。平面结构4的高度e参考常规接待台的高度,一般在1米
‑
1.1米之间,设定为1.1米。所以s i n∠a=平面结构4的高度e/辅助面d的高度=1.1/2.2=0.5。∠a=30
°
,2∠b=90
°‑
∠a=60
°
。∠b=∠b’=30
°
。显示屏5的高度从背景的整体视觉考虑为辅助面d高度的一半,平面b的长度=显示屏5的高度=1.1米。所以平面a的长度=(辅助面d的长度
‑
平面b的长度)
×
tan∠a=1.1米
×
0.5773=0.635米。所以平面c的长度=(辅助面d的长度
‑
平面b的长度)/cos∠a=1.27米。
[0092]
如图5和图6所示,在一个实施例中,优选地,所述长方形框架的两个侧边分别通过第一夹板6、第二夹板7,第三夹板6’和第四夹板67’夹住所述长方形框架,并与所述第一显示屏和所述平面结构连接。
[0093]
在一个实施例中,优选地,所述装置还包括:顶部封板8,所述顶部封板8连接在所述第一显示屏3的顶部和所述长方形框架1的顶部之间,以使顶部封闭。
[0094]
这样,从侧面和顶部封住整个全息结构,仅正面有一个窗口可以观看全息视觉显示效果,限制进入全息结构内部的光线强度,可以呈现更好的视觉效果。
[0095]
本发明的上述技术方案,与当前系统相比的优点在于不需要沉降的地面空间,对空间的要求低。被反射的空腔结构向上抬起一定角度,防止观看者看到底面的灯光和影像,可以有效防止穿帮。并且两侧和顶部的挡板将全息结构封闭成一个只有正面观看方向开口的箱体结构,有效防止外界光线干扰影像效果。
[0096]
在一个实施例中,如图7
‑
8所示,还包括升降机构,所述升降机构9包括:
[0097]
安装座91,所述安装座91上方设置第一水平安装板92,所述第一水平安装板92上端用于安装待升降器件(具体的,可将方形框架1、第一显示屏3、平面结构4和第二显示屏5
均安装在所述第一水平安装板上,用于调整整体高度;或者调整方形框架1、第一显示屏3、平面结构4和第二显示屏5中某一器件高度;或者全息成像装置中其他器件);
[0098]
若干第一电动伸缩杆93,上端沿所述第一水平安装板92下端周侧均匀布置,且所述第一电动伸缩杆93下端固定连接在所述安装座91上端;
[0099]
第一竖直导向杆94,固定连接在所述第一水平安装板92下端中部,所述第一竖直导向杆94下端贯穿至所述安装座91内;
[0100]
第一限位组件95,固定连接在所述安装座91内上部,且位于第一竖直导向杆94一侧;
[0101]
第二限位及缓冲组件96,设置在所述第一竖直导向杆94下部;
[0102]
所述第二限位及缓冲组件96包括:
[0103]
第一水平连接杆961,固定套接在所述第一竖直导向杆94下部,且所述第一水平连接杆961左右两端与所述安装座91左右两侧壁上下滑动连接;
[0104]
两个上下间隔的第一缓冲组962,所述第一缓冲组962包括:第一安装壳9621,左右两端贯通;缓冲气囊9622,设置在所述第一安装壳9621内,所述缓冲气囊9622连接微型电动抽充气泵,所述微型电动抽充气泵设置在所述安装座91内;两个左右对称的连接组;
[0105]
所述连接组包括:第一水平导向杆96231,沿左右方向布置,且一端与所述第一安装壳9621外壁固定连接,另一端与所述安装座91内壁固定连接;第一竖直连接板96232,设置在所述缓冲气囊9622左侧或右侧、且左右滑动连接在所述第一安装壳9621内;两个上下对称的第一连接杆96233,一端分别连接在所述第一竖直连接板96232上部及下部,另一端与第一滑块96234连接,所述第一滑块96234滑动套接在所述第一水平导向杆96231上;第一弹簧96235,套接在所述第一水平导向杆96231上,所述第一弹簧96235一端与所述第一安装壳9621固定连接,另一端与所述第一滑块96234固定连接;第二连接杆96236,一端与所述第一滑块96234转动连接,另一端与所述第一水平连接杆961转动连接;
[0106]
所述第二限位及缓冲组件96还包括:第二竖直连接杆963,上下端分别与两个第一缓冲组962的对应侧的第一滑块96234固定连接。
[0107]
优选的,第一限位组的实施例1:所述第一限位组为左侧或右侧的一组,或左右对称的两组;所述第一限位组件包括:第三电动伸缩杆,沿左右方向水平设置,且靠近第一竖直导向杆的一侧设置限位插块,所述第一竖直导向杆的一侧设置与限位插块匹配的插槽;
[0108]
或第一限位组的实施例2:所述第一限位组为左侧或右侧的一组,或左右对称的两组;所述第一限位组件95包括:固定连接在所述第一竖直连接杆外侧的齿条;齿轮951,转动连接在所述安装座91内,且与所述齿条啮合;第二水平导向杆952,沿左右方向布置,且固定连接在所述安装座91内;第二滑块953,左右滑动的连接在所述第二水平导向杆952上;第三连接杆954,一端转动连接在所述齿轮951前侧左下部;第四连接杆955,上端与所述第二滑块953转动连接;第二电动伸缩杆956,一端固定连接在所述第四连接杆955下端,所述第二电动伸缩杆956另一端固定连接有限位插块957,所述第一竖直导向杆94下部一侧设置供所述限位插块957插入限位的限位槽。
[0109]
优选的,所述第一竖直导向杆可为伸缩杆,手动或自动;
[0110]
当需要调节第一水平安装板的高度时,启动第一电动伸缩杆;若干第一电动伸缩杆93,上端沿所述第一水平安装板92下端周侧均匀布置,可提供可靠的支撑力,且第一竖直
导向杆起到导向作用,使得运动可靠,另外当上升时,控制缓冲气囊放气(或第一竖直导向杆可为伸缩杆,固定端连接所述第一水平连接杆,第一竖直导向杆可伸长便于上升,此时缓冲气囊可不放气),便于第二连接杆作用,以使得第一竖直导向杆方便上升,在第一竖直导向杆上升的过程中,第一水平连接杆起到导向的作用,使得第一竖直导向杆运动平稳,同时,上端的两个第二连接杆相互靠近、压缩第一弹簧,起到缓冲作用,同时通过第一连接杆水平推动第一竖直导向板,通过缓冲气囊起到水平方向缓冲的作用,另外通过第二竖直连接杆可通过下方的第一缓冲组起到进一步的缓冲作用;
[0111]
当第一电动伸缩杆故障导致第一水平安装板及第一竖直导向杆意外下落时,给缓冲气囊充气,使得缓冲气囊推动第一安装壳内的两个第一竖直导向板相互远离,使得第二连接杆提供向上的支撑力给第一水平连接杆,避免第一水平安装板坠落过多过快;
[0112]
另外,第一限位组,用于在上述下落时起到进一步的限位作用,通过限位插块插入限位插槽内限位;
[0113]
具体的,上述第一竖直导向杆下降时,使得右侧的第一齿轮逆时针转动,通过第三连接杆的作用带动第二滑块向右运动,从而使得第二电动伸缩杆及第四连接杆向左移动,并控制第二电动伸缩杆伸长,使得限位插块插入单位插槽内限位;上述通过齿轮及第四连接杆的作用可省力及提供可靠的限位力。
[0114]
在一个实施例中,所述全息成像装置还包括:评估报警装置,设置于所述第一显示屏上,用于评估所述第一显示屏上所显示的前景画面图像的图像质量,根据评估结果发出报警提示,其步骤包括:
[0115]
采集第一显示屏上显示的前景画面图像;
[0116]
获取采集的所述前景画面图像的图像特征,基于所述图像特征,获得采集的前景画面图像的配置文件;
[0117]
根据所述配置文件确定前景画面图像在第一显示屏上的预设显示图标;
[0118]
将采集的所述前景画面图像输入到预设语义分割网络中,基于深度逻辑关系,确定前景画面图像在第一显示屏上的当前显示图标;
[0119]
计算所述前景画面图像在第一显示屏上的当前显示图标与预设显示图标的偏差度;
[0120]
根据所述偏差度确认前景画面图像显示相对于前景画面图像的图像质量的影响因子;
[0121]
检测所述第一显示屏所处当前环境的目标环境参数,根据所述目标环境参数确认环境光线相对于前景画面图像的图像质量的影响因子;
[0122]
根据前景画面图像在第一显示屏上的当前显示图标与预设显示图标的偏差度构建前景画面图像显示偏移角度直方图;
[0123]
根据所述前景画面图像显示偏移角度直方图利用预设显示角度先验模型获得采集的前景画面图像的边缘质量得分;
[0124]
获取采集的所述前景画面图像的当前像素值,利用预设损失函数确定当前像素值中的降质像素值;
[0125]
构建所述降质像素值在前景画面图像的当前像素值中的概率分布;
[0126]
根据所述降质像素值在前景画面图像的当前像素值中的概率分布获得采集的前
景画面图像的纹理质量得分;
[0127]
根据所述前景画面图像的纹理质量得分和边缘质量得分以及前景画面图像显示相对于前景画面图像的图像质量的影响因子和环境光线相对于前景画面图像的图像质量的影响因子综合计算出前景画面图像的最终图像质量分数;
[0128]
确认所述最终图像质量分数是否大于等于预设分数,若是,确认所述前景画面图像的图像质量合格,无需进行后续操作,否则,确认所述前景画面图像的图像质量不合格,发出报警提示。
[0129]
上述技术方案的有益效果为:通过获取前景画面图像的图像质量的影响因子可以保证最终获得的前景画面图像的图像质量的准确性和实际性,进一步地,通过从前景画面图像的边缘以及纹理两个方面来评估其质量分数可以综合考虑更加细致地确定前景画面图像的图像质量分数,提高了数据的严谨性,进一步地,通过向用户发出报警提示可以使得用户可以及时地对前景画面图像的分辨率等进行调整,保证了用户的观看体验,提高了用户的体验感。
[0130]
在一个实施例中,所述平面结构还包括:
[0131]
获取模块,用于按帧获取在所述第一平面显示的第一图像、在所述第二平面显示的第二图像和在所述第三平面显示的第三图像;
[0132]
划分模块,用于将所述第一图像、所述第二图像和所述第三图像进行预设行列的划分,分别获得n行m列的第一子图像、第二子图像、第三子图像;
[0133]
第一计算模块,用于基于n行m列的所述第一子图像、所述第二子图像和所述第三子图像的对应图像参数值,计算出n行m列的所述第一子图像、所述第二子图像和所述第三子图像的图像显示评估值:
[0134][0135]
式中,t∈[1,3],且t表示所述第t图像,i表示预设行数,且取值范围为[1,n],j表示预设列数,且取值范围为[1,m],为所述第t图像中第i行第j列对应的第t子图像的的图像显示评估值,y
tij
为所述第t图像中第i行第j列对应的第t子图像的图像参数值,σ
tij
为所述第t图像中第i行第j列对应的第t子图像的像素参数权重值,a
tij
为所述第t图像中第i行第j列对应的第t子图像的像素参数的转换值,σ
″
tij
为所述第t图像中第i行第j列对应的第t子图像的亮度参数权重值,b
tij
为所述第t图像中第i行第j列对应的第t子图像的亮度参数的转换值,σ
″′
tij
为所述第t图像中第i行第j列对应的第t子图像的色彩参数权重值,c
tij
为所述第t图像中第i行第j列对应的第t子图像的色彩参数的转换值,exp()为以自然常数e为底的指数函数,且e的取值为2.72;
[0136]
第二计算模块,用于基于n行m列的所述第一子图像、所述第二子图像和所述第三子图像的图像显示评估值,计算所述平面结构上的显示图像当前帧的衔接度:
[0137]
[0138]
式中,ε为所述平面结构上的显示图像当前帧的衔接度,()
max
为取最大值,()
min
为取最小值;
[0139]
监控模块,用于基于所述平面结构上的显示图像预设帧数对应的衔接度和以下公式,获得所述平面结构的显示性能指数ω,当所述显示性能指数ω不满足要求时,发出报警信息;
[0140][0141]
式中,ω为所述平面结构的显示性能指数,p为所述平面结构上的显示图像的帧序数,ε
p
为所述平面结构上的显示图像第p帧的衔接度,p为所述平面结构上的显示图像预设帧数的总帧数。
[0142]
上述技术方案的有益效果为:通过按帧获取在所述第一平面显示的第一图像、在所述第二平面显示的第二图像和在所述第三平面显示的第三图像并划分,进一步地,基于n行m列的所述第一子图像、所述第二子图像和所述第三子图像的对应图像参数值,获得所述平面结构的显示性能指数ω,可以判断所述平面结构中的第一平面、第二平面、第三平面是否满足显示要求,并基于判断结果发出报警信息,实现对所述平面结构显示效果的实时监控。
[0143]
根据本发明实施例的第二方面,提供一种全息成像装置的成像方法,用于上述第一方面实施例中任一项所述的全息成像装置,所述方法包括:
[0144]
通过第一显示屏显示前景画面影像,通过第二显示屏显示背景画面影像,所述背景画面影像的光以及平面结构形成的空间反射出的光入射到全息膜上,并由从全息膜反射的光形成虚像,所述虚像位于所述全息膜的后方。
[0145]
在该实施例中,在使用中,舞台上会显示两层画面,一层是前景画面,一层是背景画面,两层画面间隔一定的距离,画面间的纵深感会让人们感觉前景的画面有较强的立体感。全息膜后方的显示屏3负责显示前景画面。背景画面通过显示屏5显示出影像,该影像的光以及结构4形成的空间反射出的光入射到全息膜2上,从而由从全息膜2反射的光形成虚像,该虚像看上去位于全息膜2的后方。这样看上去在显示屏3的后面成像出一个纵深很强的立体空间,显示屏5所显示的背景影像与显示屏3所显示的前景影像产生明显的纵深感。从而让人忽略掉眼前的显示屏3,在整个装置内呈现出裸眼3d的立体影像显示效果。
[0146]
进一步可以理解的是,本发明中“多个”是指两个或两个以上,其它量词与之类似。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
[0147]
进一步可以理解的是,术语“第一”、“第二”等用于描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开,并不表示特定的顺序或者重要程度。实际上,“第一”、“第二”等表述完全可以互换使用。例如,在不脱离本发明范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。
[0148]
进一步可以理解的是,本发明实施例中尽管在附图中以特定的顺序描述操作,但
是不应将其理解为要求按照所示的特定顺序或是串行顺序来执行这些操作,或是要求执行全部所示的操作以得到期望的结果。在特定环境中,多任务和并行处理可能是有利的。
[0149]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。另外,各个实施例之间的技术方案以及技术特征可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0150]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
