1.本发明专利涉及激光抛光领域,特别涉及需要预热和多个自由度的工作领域。
背景技术:
2.抛光是一种常见的表面处理工艺,近年来,由于激光加工技术的兴起,激光抛光被广泛应用于金属和陶瓷材料表面,但是因为熔融态材料与环境的温差过大,导致抛光表面应力过大,会有裂纹的产生,因此需要对材料进行预热处理,减小表面过冷度,降低表面应力,减少裂纹的产生。现有的激光抛光工作台,一般采用三维工作台,即可以实现x、y、z轴方向的平动,当工件为曲面时,容易出现工件某些部位被遮挡,且工作台底部无预热功能。
3.中国专利局于2011年10月12日公布了一份cn102211330号专利,名称为多自由度工作台,该工作台包括上下升降机构和水平面的移动机构及多角度旋转机构,由于该旋转机构采用球座包容一个球体结构,此结构降低了旋转角度范围,同时工作台需要手动调节平动和旋转机构,工作效率较低。
4.中国专利局于2015年1月14日公布了一份cn204097568u号专利,名称为一种多自由度工作台,该工作台包括x、y、z轴向移动机构,绕z、x轴转动的旋转机构,但该工作台不具备预热保温功能。
5.基于现有激光抛光工作台的不足,设计一种具有结构简单、多自由度、自动调节、预热精确等特点的激光抛光多维预热工作台是很有必要的。
技术实现要素:
6.本发明要解决的技术问题在于,基于以上背景技术,提供了一种简单结构的激光抛光多维预热工作台,不仅可以实现x、y、z轴方向的移动,还可以z轴旋转以及沿两连接件的连线旋转,底部设有电热盘,从而对复杂工件的表面进行预热抛光处理。
7.本发明解决其技术问题所采用的技术方案是:提供一种用于激光抛光的多维预热工作台,包括:
8.平动机构,所述平动机构包括x轴向移动的第一平动机构、y轴向移动的第二平动机构、z轴向移动的第三平动机构;所述第二平动机构安装于第一平动机构之上,第三平动机构安装于第二平动机构之上;
9.旋转机构,所述旋转机构包括外平台、内环、热盘底座以及两连接件;
10.电热盘及其控制装置,所述装置包括电热盘、导线及其控制装置,电热盘安装在热盘底座上;
11.进一步地,所述第一平动机构包括x轴底座、两个第一滑轨、第一丝杆、两第一滑块与第一丝杠相连接的第一电机。所述第一丝杠分别与第一电机的输出端相连接,两第一滑块分别穿过丝杠,两第一滑块内部带有螺纹,分别与丝杠相咬合。当电信号传到电机时,第一电机开始动作,驱动丝杠旋转,从而使两第一滑块沿丝杠轴向移动。
12.进一步地,所述第二平动机构包括y轴底座、与两第一滑块相连接的四个螺栓、第
二丝杠以及两第二滑轨、第二电机。所述底座垂直放置于第一底座之上,通过四个螺栓与第一平动机构的两第一滑块相连接,第二丝杠穿过第二底座平台上上相应的孔安装,两第二滑轨安装在第二丝杆两侧,第一丝杠与y轴底座之间的螺纹相互咬合,电机和第一平动机构一样安装在第二丝杠的一端,当电信号传到电机时,第二电机驱动丝杠旋转,通过丝杠和y轴底座螺纹相互咬合,驱动y轴平台沿丝杠轴向移动。
13.进一步地,所述第三平动机构包括四个第三丝杠、滑块平台、z轴上环、z轴底座、两个第三电机。所述四个第三丝杠垂直安装在z轴底座上,滑块平台通过内螺纹与四个第三丝杠相连接,z轴底座装有容纳旋转装置的预留空间,z轴上环套在四个第三丝杠之上,两第三电机和两对称第三丝杠相连接,驱动滑块平台沿丝杠轴向移动。
14.进一步地,所述滑块平台安装在第三平动机构的丝杆之上,内环通过两连接件安装在滑块平台轴中心位置,相似的,热盘底座通过两连接件安装在内环的轴中心位置。所述内环可以在两连接件作用下绕z轴旋转且可以在两第一连接件的连线下旋转,热盘底座可以在两连接件作用下绕z轴旋转且可以在两第二连接件的连线下旋转;以上连接件连线轴线处各装有一个电机。滑块外装有电机驱动滑块沿环滑动,从而产生绕z轴旋转。
15.进一步地,所述滑块平台内部环形区域设有第三轨道,所述第一连接件的一端可沿第三轨道滑动,实现内环及其热盘底座绕z轴旋转;所述内环设有第四轨道,所述第二连接件的一端可沿第四轨道滑动,所述热盘底座设有凹槽。
16.进一步地,所述第一连接件包括滑块、电机和齿轮,所述滑块安装在第三轨道上,所述滑块设有一孔,所述电机一端安装在滑块孔内,输出轴一端伸入内环连接处。
17.进一步地,所述第二连接件包括滑块、电机和齿轮,所述滑块安装在第四轨道上,所述滑块设有一孔,所述电机一端安装在滑块孔内,输出轴一端伸入热盘底座连接处。
18.进一步地,所述两连接件连线处的电机靠近滑块一端固定,保证输出端旋转。
19.进一步地,所述所有电机均为伺服电机。
20.进一步地,所述第二、三滑块均设有两卡爪。
21.进一步地,所述电阻丝热盘安装在热盘底座中心位置,热盘底座上凹槽处安装有真空保温环,导线通过热盘底座下孔连接温控装置,电阻丝采用碳纤维电热管。采用上述发明的有益效果在于:(1)当工件放置在热盘上时,由于本平台采用伺服电机驱动,电脑控制,可提前通过计算机设置加工轨迹,可精确控制加工轨迹间隔。(2)采用平动机构和旋转机构相结合,可对复杂曲面平面相结合的工件直接加工。(3)热盘底部设有碳纤维电热管并连接温控装置,预热温度可调节,可实现激光抛光前预热和激光抛光过程中同台预热,提高抛光效率。
附图说明
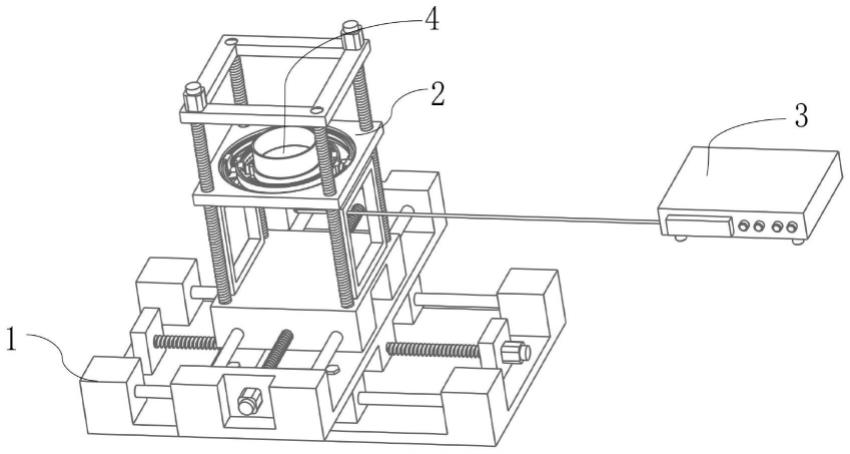
22.为了能清晰的对本发明的具体实施方式作出进一步的说明,下面将对实施例中所需要使用的附图简单地介绍:图1是本发明提供的多维预热平台的立体结构图;
图2是本发明提供的多维预热平台的爆炸分解图;图3是本发明提供的多维预热平台平动机构爆炸分解图;图4是本发明提供的多维预热平台旋转机构爆炸分解图;图5是本发明提供的带电机一端第一连接件的爆炸分解图;图6是本发明提供的真空保温环剖面图;
23.其中,附图说明如下:1.1、第一平动机构:11x轴底座;12第一滑轨;13第一丝杠;14第一电机;15第一滑块;1.2、第二平动机构:21y轴底座;22第二滑轨;23第二丝杠;24第二电机;25螺栓;1.3、第三平动机构:31z轴底座;32预留空间;33第三丝杠;34z轴上环;35第三电机;36滑块平台;1.4、第一旋转机构:41滑块平台轨道;42第二滑块;43第一齿轮;44第一内齿;45第四电机;46卡爪;1.5、第二旋转机构:51内环;52内环滑轨;53第三滑块;54第二齿轮;55第二内齿;56第五电机;1.6、第三旋转机构:61第六电机;62第一配重轴;1.7、第四旋转机构:71第七电机;72第二配重轴;73热盘底座;1.8电热盘及控制装置:81热盘;82连接线;83温度调节装置;84真空保温环;85真空腔体;
具体实施方式
24.本发明公开了一种用于激光抛光的多维预热平台,具有结构简单、自由度高、自动调节、预热精确,为激光抛光复杂工件预热提供简单可行的装置。
25.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
26.实施方案一
27.一种用于激光抛光的多维预热平台,如图1所示,其包括平动机构1、用于旋转的旋转机构2、碳纤维电热盘4以及用于精确控温的控制装置3。平动机构包括x轴移动的第一平动机构,y轴移动的第二平动机构,沿z轴移动的第三平动机构,上述第二平动机构安装于第一平动机构之上,第三平动机构安装于第二平动机构之上。旋转机构包括绕z轴旋转第一旋转机构、沿内环轨道52中心线旋转第二旋转机构、沿第六电机61和配重轴62连线旋转的第三旋转机构、沿第七电机71和第二配重轴72连线旋转的第四旋转机构,上述第一旋转机构安装在滑块平台36上,具体在滑块平台轨道41上,第二旋转机构安装在内环滑轨52上,第三旋转机构安装两第二滑块42连线上,第四旋转机构安装在两第三滑块53连线处。
28.其中,如图2所示,第一平动机构包括x轴底座11、安装在所述x轴底座11上的两个第一滑轨12、安装在所述x轴底座11上的第一丝杠13、以及安装在第一丝杠13一端的第一电机14和安装在两个第一滑轨12上的两个第一滑块15。其中,上述第一电机14安装在第一丝杠13的一端,y轴底座21与x轴底座11垂直放置,第一丝杠13与第二平动机构的y轴底座21螺纹相连接,同时y轴底座21通过四个螺栓25安装在两第一滑块15上,两第一滑块15可以在两
第一滑轨12上沿轴向滑动,作为y轴底座21的支撑,使其稳定的沿轴向移动。当有电信号时,第一电机14开始转动,带动第一丝杠13旋转,在螺纹的作用下以及两第一滑轨12的约束下,y轴底座21沿x轴向发生平动。
29.作为一个优选的实施方式,本发明第一平动机构采用两组第一滑轨12,中间丝杠驱动使y轴底座21产生平动效果,其目的是增加所承载y轴底座21的稳定性,在实际工作中,可根据实际所承载的底座的尺寸增加滑轨的数量,使其达到足够的稳定性。但无论第一平动机构采用多少组第一滑轨12,均在本发明保护范围之内。后续第二平动机构滑轨数量和第三平动机构的丝杠数量与此相似。
30.第二平动机构采用和第一平动机构相似结构,其包括安装在第一平动机构之上的y轴底座21、安装在y轴底座21中轴线的第二丝杠23、安装在底座一端与第二丝杠23相连接的第二电机24、安装在y轴底座21下部四个孔处的四个螺栓25和两个安装在y轴底座21上的第二滑轨22。其中,上述第二丝杠23安装于y轴底座21中轴线对应的孔位之中,第二电机24安装在第二丝杠23的的一端,与第二丝杠23相连接,y轴底座21的四个孔分别与第一平动机构上的两滑块15上的孔对齐,两底座垂直放置,四个螺栓25分别安装于y轴底座21的四个孔内,使其第二平动机构安装在第一平动机构之上,两第二滑轨22安装于y轴底座21两边孔对应的位置,z轴底座31中间孔横穿第二丝杠23的轴线,其内螺纹与丝杠23的螺纹连接,两第二滑轨22分别穿过z轴底座31两边孔,使其z轴底座31可以在两第二滑轨22轴线方向滑动。当有电信号时,第二电机24旋转带动第二丝杠23旋转,第二丝杠23驱动z轴底座31沿y轴向平动,采用双第二滑轨22可以增加z轴底31平动时的稳定性,使其平稳滑动。
31.第三平动机构包括z轴底座31、4根第三丝杠33、z轴上环34、两个第三电机35和滑块平台36。其中,z轴底座31安装在第二平动机构第二丝杠23和两第二滑轨22上,第三丝杠33分别安装于z轴底座31四角的四个孔内垂直底座平面,第三丝杠33的上端安装一个z轴上环,使其四个第三丝杆33相互支撑,同时为两第三电机35提供安装平台,滑块36平台安装在四个第三丝杠33轴线处,第三丝杠33与滑块36平台上的内螺纹相连接,两第三电机35安装于第三丝杠33的上端,对角线放置,使其在工作时,两丝杠可以提供对称的升力,配合两个不带动力的对称第三丝杠33,可以增大在电机不旋转时,滑块平台36和第三丝杠33的自锁能力,使滑块平台36悬停,z轴平台31上设有预留空间32,可以为旋转机构提供足够的旋转空间。当有电信号时,两电机35同时启动,带动相连接的两第三丝杠33旋转,使其滑块平台36在预留空间32上部和z轴上环3之间上下平动。
32.如图4所示,第一旋转机构包括滑块平台轨道41、安装滑块平台轨道41上的两第二滑块42、安装在第二滑块42底部的第一齿轮43、位于滑块平台36内圈的第一内齿44和安装在第二滑块42底部的第四电机45。其中两第二滑块42设有卡爪46上下分别卡入滑块平台轨道41,可以沿滑块平台轨道41做圆周运动,在第二滑块42底部设有预留小孔,第四电机45穿过小孔,轴线竖直向上,第一齿轮43安装在第四电机45的输出轴上,第一齿轮43与滑块平台36内圈内齿内啮合。当有电信号时,第四电机45驱动第一齿轮43转动,第一齿轮43驱动第二滑块42整体绕z轴旋转。
33.如图5所示,所有旋转机构的连接件均采用图5连接方式,其中两第二42滑块设有卡爪45上下分别卡入滑块平台轨道41,可以沿滑块平台轨道41做圆周运动,在第二滑块42底部设有预留小孔,第四电机45穿过小孔,轴线竖直向上,第一齿轮43安装在第四电机45的
输出轴上,第一齿轮43与滑块平台36内圈上第一内齿44内啮合,此外第一旋转机构和第二旋转机构各自两组滑块中只有一组装有电机,第三和第四旋转机构各自连线处只装有一个电机,其余分别装有一个配重轴,和电机重量相似,既能实现旋转又可以使73热盘底座达到平衡。配重轴装配方式和电机61装配方式相同,不同之处是,没有装配齿轮和相应驱动电机。
34.第二旋转机构包括安装在滑块平台轨道41内圈的内环51、位于内环51内圈的内环滑轨52、位于内环51的第二内齿55、安装在内环轨道52的两第三滑块53、安装在滑块53底部的第二齿轮54及第五电机56。第二旋转机构和第一旋转机构采用相似的结构,其目的是使第二内齿54驱动第三滑块53整体沿内环轨道52滑行。
35.第三旋转机构包括安装在第二滑块42和内环51端面轴线处的第六电机61和安装在对称位置的第一配重轴62。第六电机61和配重轴62重量一样,保证了第三旋转机构始终处于平衡状态。当有电信号时,第六电机61旋转,使其内环51绕第六电机61和配重轴62的连线旋转,从而改变内环51平面的角度。
36.第四旋转机构包括安装在第三滑块53和热盘底座73端面连线处的第七电机71、安装在对称位置的第二配重轴72和安装在第七电机71和第二配重72轴连线中心处的热盘底座73。第四旋转机构和第三旋转机构机构相似。其目的是在第七电机71的驱动作用下,热盘底座73可以绕第七电机71和配重轴72的连线处旋转,从而改变热盘底座73平面的角度。
37.如图2所示,电热盘及其控制装置包括电热盘81、导线82、温度调节装置83、真空保温环84。其中电热盘81安装在热盘底座73上,导线82通过热盘底座73的孔与温度调节装置83连接,保温环84安装在热盘底座73预留槽内。真空保温环剖面如图6所示,真空腔体85抽真空,能有效的隔绝四周热量的散失。电热盘采用碳纤维电热丝,其工作温度在40℃-1200℃任意值,最大峰值温度可达1400℃,可满足常用金属及合金的预热需求。
38.本发明中各运动机构均使用伺服电机驱动,并配置编码器进行反馈控制。
39.本发明中,每支丝杠两端均设有支撑架,以保证丝杠可作无障碍的转动。
40.实施案例二
41.一种用于激光抛光的多维预热平台在激光抛光实际应用中应当将整个装置及工件放于密闭空间,密闭空间充入惰性气体氩气等,激光通过密闭空间上表面透明玻璃与工件加工表面接触,通过调整多维预热工作台调整工件的加工位置及预热温度,同时在氩气保护气体的作用下,激光抛光工件能有效的减少裂纹的产生,从而提高工件的加工质量。
42.应当理解的是,以上实例仅用于说明本发明的技术方案,而非对其限制,对于本领域的技术人员来说,可以对以上实施所记载的技术方案进行修改和等同替换,但所有的修改和替换在不超出权利要求所记载的技术方案的前提下都应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。