1.本发明涉及书法机器人技术领域,尤其涉及一种负反馈调节式的书法机器人。
背景技术:
2.书法机器人是能够实现自主书写汉字的设备,针对书法机器人,现已有大量研究,但是其多为6轴机械臂的结构,精度要求高。如公开号为cn201810076952.x的专利,该发明提供一种机器人书法系统,主要由机架、笔桥、笔座、平移机构和笔势控制机构组成,其中平移机构用于带动笔座在三维直角坐标系的xy方向位移形成笔迹,笔势控制机构包括框体和球体,球体安装在框体内,框体上安装有用于带动球体旋转的滚轴,并在滚轴上安装有电机和滚动编码器;平移机构包括四个动轮、四个定轮和一条封闭的同步带,动轮安装在工字型笔桥的四个角上,定轮安装在机架的四个角上,同步带呈h形绕制在动轮与定轮上;使用时,向两个定轮分别输入变化的转矩,带动同步带及笔桥形成预设的轨迹,同时笔势控制机构按照预设的压感控制书写压力,实现自动化的签名。又如公开号为cn104875208a的的专利,该发明涉及一种书法机器人,其结构包括:机械臂、软头书写笔、压力传感器、连续供墨管道、负压吸附固定纸平面、个人电脑端软件。机械臂具有3个水平旋转轴加一个垂直移动轴,采用串联结构,旋转轴都由步进电机、多级同步带传动,平移轴用导轨丝杆传动;运动控制器与电机功率驱动电路嵌入机械臂内部,不需要外置控制柜;机械臂与电脑通过usb连接,在个人电脑端软件控制下写字。
3.但现有大多数书法机器人机构对末端的控制方法大多为在平台下安装压力传感器,或者直接根据末端位置控制电机。前者因压力传感器需要检测整个平面,成本较高;后者对笔的形态、尺寸和固定位置有严格要求,容错率较低。现有的书法机器人末端位姿和压力控制系统均为独立控制,且压力控制模块的实现成本较高或容错率较低。
技术实现要素:
4.本发明目的在于针对现有技术的缺陷,提供一种负反馈调节式的书法机器人,通过二自由度平动机构实现执行机构末端在平面内的运动;通过末端调整机构实现笔的位姿调整;通过压力检测模块和末端调整机构实现对纸笔间压力反馈调节;机构的末端在平面内的运动通过丝杠实现,能以较低的成本实现高精确度的控制。
5.为解决上述技术问题,本发明提供技术方案如下:
6.一种负反馈调节式的书法机器人,其特征在于:包括二自由度平动机构、压力检测模块、末端调整机构,所述二自由度平动机构包括两个第一丝杠机构、一个第二丝杠机构,两个第一丝杠机构平行设置,所述第二丝杠机构垂直滑动连接于第一丝杠机构,第二丝杠机构能够沿着第一丝杠机构滑动,所述压力检测模块包括称重传感器,所述末端调整机构包括舵机、曲柄、连杆、滑块、滑轨、笔夹,所述称重传感器的一端连接于所述第二丝杆机构,能够沿着第二丝杠机构滑动,另一端连接于所述舵机,舵机上的驱动轴依次连接曲柄、连杆、滑块,所述滑轨通过滑轨固定件连接于舵机的外壳上,所述滑块套设在滑轨上,所述笔
夹连接在滑块上,用于固定笔。
7.进一步的,所述第一丝杠机构包括第一丝杠、第一运动块、第一电机,所述第一运动块与第一丝杠螺纹连接,所述第一电机连接并带动第一丝杠,所述第二丝杠机构包括第二丝杠、第二运动块、第二电机,所述第二运动块与第二丝杠螺纹连接,所述第二电机连接并带动第二丝杠,所述第一运动块通过丝杠间连接件连接所述第二丝杠机构。
8.进一步的,所述称重传感器的一端通过称重传感器连接件连接所述第二运动块的下侧,另一端通过舵机连接件连接所述舵机。
9.进一步的,所述称重传感器采用yzc131模块,通过ad转换器hx711模块输出压力测试结果,并将参数通过程序用于反馈调节末端调整机构的姿态。
10.进一步的,所述笔夹上设置有紧固螺栓。
11.进一步的,所述曲柄连接于所述驱动轴的一端,驱动轴的另一端连接有旋转圆片。
12.进一步的,用机架承载所述二自由度平动机构,所述机架采用铝型材拼接而成。
13.进一步的,所述舵机型号为rds6160。
14.与现有技术相比,本发明的有益效果是:1、通过压力检测模块读取笔尖与纸面之间的压力,反馈调节末端调整机构。末端调整机构提供竖直方向上的平移自由度,以调整笔的高度和压力。当笔尖接触到纸面,会受到向上的支持力,使得原本为末端调整机构重力的压力值减小。依据此减小量反馈调节舵机转速,当压力达到设定值时,速度为零,即可实现将笔尖调整到合适高度,实现在平面或有一定平缓起伏的表面上进行书写、绘画等功能。2、通过二自由度平动机构实现末端调整机构在水平面内的平移运动。
附图说明
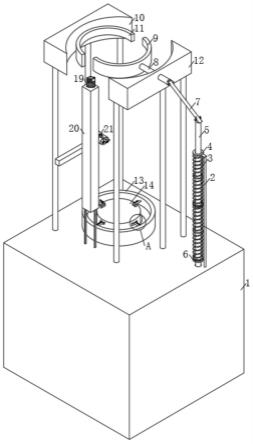
15.图1为本发明实施例整体结构示意图;
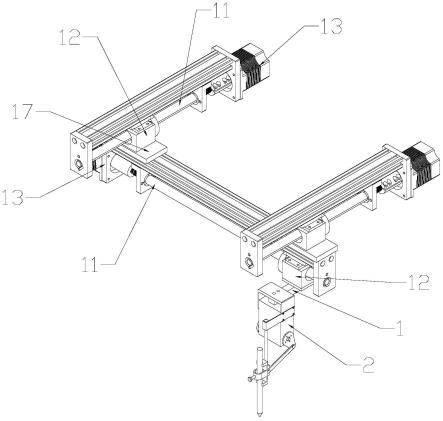
16.图2为本发明实施例压力检测模块、末端调整机构结构示意图;
17.图3为本发明实施例末端调整机构爆炸图。
18.其中:1-称重传感器,2-舵机,3-曲柄,4-连杆,5-滑块,6-滑轨,7-笔夹,8-驱动轴,9-滑轨固定件,10-笔,11-第一丝杠,12-第一运动块,13-第一电机,14-第二丝杠,15-第二运动块,16-第二电机,17-丝杠间连接件,18-称重传感器连接件,19-舵机连接件,20-紧固螺栓,21-旋转圆片。
具体实施方式
19.为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
20.图1-3示出了一种负反馈调节式的书法机器人的具体实施例,包括二自由度平动机构、压力检测模块、末端调整机构,二自由度平动机构包括两个第一丝杠机构、一个第二丝杠机构,两个第一丝杠机构平行设置,第二丝杠机构垂直滑动连接于第一丝杠机构,第二丝杠机构能够沿着第一丝杠机构滑动,压力检测模块包括称重传感器1,末端调整机构包括舵机2、曲柄3、连杆4、滑块5、滑轨6、笔夹7,舵机2上的驱动轴8的一端依次连接曲柄3、连杆4、滑块5,另一端连接有旋转圆片21。滑轨6通过滑轨固定件9连接于舵机2的外壳上,滑块5套设在滑轨6上,笔夹7连接在滑块5上,笔夹7上设置有紧固螺栓20用于固定笔10。
21.如图1所示第一丝杠机构包括第一丝杠11、第一运动块12、第一电机13,第一运动块12与第一丝杠11螺纹连接,第一电机13连接并带动第一丝杠11,第二丝杠机构包括第二丝杠14、第二运动块15、第二电机16,第二运动块15与第二丝杠14螺纹连接,第二电机16连接并带动第二丝杠14,第一运动块12通过丝杠间连接件17连接第二丝杠机构,丝杠间连接件17为铝制。称重传感器1的一端通过称重传感器连接件18连接第二运动块15的下侧,另一端通过舵机连接件19连接舵机2,称重传感器1能够沿着第二丝杠机构滑动。
22.采用机架承载二自由度平动机构,机架采用铝型材拼接而成,包括:580mm 4040铝型材4根,500mm 4040铝型材10根,580mm
×
580mm铝塑板1块,四角各切掉一个40mm
×
40mm的正方形。4根580mm型材用于作为机架高方向的框架,8根500mm型材作为机构长、宽方向的框架。上述12根型材构成一个500mm
×
500mm
×
580mm的长方体框架结构。2根500mm型材在框架上层500mm
×
500mm的表面,按互相平行且与框架一条500mm边平行的方向安装,用于承载二自由度平动机构。铝塑板固定在机架下方500mm
×
500mm框架的上表面,用于在书写时承载纸张。
23.称重传感器1采用yzc131模块,通过ad转换器hx711模块输出压力测试结果,并将参数通过程序用于反馈调节末端调整机构的姿态。
24.本实例中,压力检测模块的工作原理是:称重传感器1在初始状态下测得末端调整机构和笔10的重量,将此重量作为初始值录入。当纸面受到笔10的压力,称重传感器1受到的压力减小,此减小量即为纸面受到的压力。称重传感器1通过a/d转换器向单片机发送测重结果,当检测到笔10与纸面产3n以上的压力,即称重传感器1测得的重量变化值为减少0.3kg时,可以认为笔10与纸面压紧。舵机2的运行速度受到单片机根据称重传感器1的反馈结果与预设值的差控制,末端调整机构在笔10压紧纸面前会持续让笔夹7沿滑轨6向下运动,直到笔尖压力达到设定值,舵机2停止使得末端调整机构保持静止。称重传感器1测得的压力变化值用于负反馈调节舵机2的转速,即末端调整机构的运行速度,采用pid算法根据压力与预设压力的差值调节速度。使得压力与预设压力差值为3n时,舵机1以预设的最大速度运行;当压力变化量达到3n的预设值,速度降低为0;期间速度总体变化情况为随此差值的增大而减小。
25.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。