1.本技术涉及焊接装置的领域,尤其是涉及一种自适应高精度焊接装置。
背景技术:
2.观光车的车架通常运用金属材,由金属材加工成为车架时需要经过焊接工艺,应用于观光车上的金属材包括金属杆和金属板,金属杆的一端向上拱起为拱起段,金属杆的另一端向其宽度方向的一侧弯曲为弯曲段,金属杆的其余部分为平直段,金属板和拱起段焊接,通常使用焊接装置进行焊接。
3.相关技术中,焊接装置包括安装座和焊接机器人,焊接时,由工作人员将金属杆放置于安装座上,然后手持金属板,将金属板的一端和金属杆的拱起段抵接,再由焊接机器人对抵接处进行焊接。
4.针对上述中的相关技术,发明人认为由工作人员扶着金属板焊接,金属杆和金属板易发生相对位移,金属杆和金属板的焊接位置难以确定,降低了金属杆和金属板的焊接精度。
技术实现要素:
5.为了提高金属杆和金属板的焊接精度,本技术提供一种自适应高精度焊接装置。
6.本技术提供的一种自适应高精度焊接装置采用如下的技术方案:
7.一种自适应高精度焊接装置,包括安装座和焊接机器人,金属杆位于安装座上,金属板和金属杆的拱起段抵接,金属板和金属杆拱起段的抵接处为焊接位置,焊接机器人用于将金属杆和金属板焊接,还包括第一限位组件,所述安装座上设置有安装柱,金属板位于安装柱上,所述安装柱上设置有定位柱,金属板上开设有供定位柱穿过的定位孔,所述第一限位组件用于对金属板限位。
8.通过采用上述技术方案,在金属板和金属杆确定焊接位置后,将定位柱穿过定位孔后用第一限位组件对金属板进行限位,金属板和金属杆不易发生相对位移,从而提高了金属杆和金属板的焊接精度。
9.可选的,所述第一限位组件包括第一立柱和第一快速夹具,所述第一立柱设置于安装座上,所述第一立柱位于金属板处,所述第一快速夹具设置于第一立柱的顶面上。
10.通过采用上述技术方案,工作人员转动第一快速夹具的手持部使得第一快速夹具的夹钳部与金属板抵接,以实现第一限位组件对金属板的限位。
11.可选的,自适应高精度焊接装置还包括第二限位组件,所述第二限位组件用于对金属杆远离金属板的一端限位,所述第二限位组件包括第二立柱和第二快速夹具,所述第二立柱设置于安装座上,所述第二立柱位于金属杆远离金属板的一端,所述第二快速夹具设置于第二立柱的顶面上。
12.通过采用上述技术方案,工作人员转动第二快速夹具的手持部使得第二快速夹具的夹钳部与金属杆远离金属板的一端抵接,对金属杆远离金属板的一端进行限位,第一限
位组件和第二限位组件配合使用,提高了金属板和整根金属杆位于安装座上的稳定性,金属板和金属杆更不易发生相对位移,从而进一步提高了金属杆和金属板的焊接精度。
13.可选的,所述安装座上设置有限位板,所述限位板位于金属杆的水平段,所述限位板的一端和安装座连接,所述限位板远离安装座的一端开设有供金属杆卡设的限位槽。
14.通过采用上述技术方案,金属杆的水平段卡设于限位槽内,限位板既为金属杆提供了支撑,又限制了金属杆宽度方向上的位移,金属板和金属杆更不易发生相对位移,从而进一步提高了金属杆和金属板的焊接精度。
15.可选的,所述安装座上设置有支撑板,所述支撑板位于金属杆的弯曲段处。
16.通过采用上述技术方案,支撑板为金属杆的弯曲段提供了支撑,限位板和支撑板配合使用,提高了整根金属杆在长度方向上各处受力的均匀性。
17.可选的,自适应高精度焊接装置还包括微调机构,所述微调机构包括滑移组件和伸缩弹簧;所述滑移组件包括转动电机、螺杆、滑块和限位件;
18.所述安装座上靠近金属板的一端设置有第一固定柱,所述转动电机设置于第一固定柱上,所述转动电机的转轴和螺杆连接,所述螺杆远离转动电机的一端穿过滑块且与滑块螺纹连接,所述螺杆的长度方向和金属杆的长度方向平行,所述限位件限制滑块随螺杆的转动而转动,所述滑块和金属杆长度方向上靠近金属板的一面抵接;
19.所述安装座上远离金属板的一端设置有第二固定柱,所述第二固定柱上设置有固定板,所述伸缩弹簧设置于固定板上,所述伸缩弹簧的长度方向和金属杆的长度方向平行,所述伸缩弹簧的一端和固定板连接,所述伸缩弹簧的另一端和金属杆长度方向远离金属板的一面抵接。
20.通过采用上述技术方案,启动转动电机,驱动螺杆转动,带动滑块滑动,滑块推动金属杆在金属杆的长度方向上进行微调,伸缩弹簧与滑移组件配合使用以使用金属杆的移动;当滑块将金属杆朝向远离转动电机的方向推动时,伸缩弹簧被压缩;当滑块朝向靠近转动电机的方向移动时,伸缩弹簧由于想要恢复原长,将金属杆朝向靠近转动电机的方向推动;上述过程实现了对金属杆在金属杆长度方向上位置的微调,相较于工作人员手动调整时移动位置的不稳定性,机械调整的稳定性更高,提高了对金属杆位置微调的精度,从而进一步提高了金属杆和金属板的焊接精度。
21.可选的,所述滑块通过弹性件和金属杆长度方向上靠近金属板的一面抵接。
22.通过采用上述技术方案,弹性件的设置减少了金属杆和滑块间的磨损。
23.可选的,所述限位件为导杆,所述导杆的一端和转动电机固定连接,所述导杆的另一端和滑块固定连接。
24.通过采用上述技术方案,导杆的一端和转动电机固定连接,导杆的另一端和滑块固定连接,实现了对滑块随螺杆转动而转动的限制。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.在金属板和金属杆确定焊接位置后,将定位柱穿过定位孔后用第一限位组件对金属板进行限位,金属板和金属杆不易发生相对位移,从而提高了金属杆和金属板的焊接精度;
27.2.工作人员转动第一快速夹具的手持部使得第一快速夹具的夹钳部与金属板抵接,以实现第一限位组件对金属板的限位;工作人员转动第二快速夹具的手持部使得第二
快速夹具的夹钳部与金属杆远离金属板的一端抵接,对金属杆远离金属板的一端进行限位,第一限位组件和第二限位组件配合使用,提高了金属板和整根金属杆位于安装座上的稳定性,金属板和金属杆更不易发生相对位移,从而进一步提高了金属杆和金属板的焊接精度;
28.3.启动转动电机,驱动螺杆转动,带动滑块滑动,滑块推动金属杆在金属杆的长度方向上进行微调,伸缩弹簧与滑移组件配合使用以使用金属杆的移动;当滑块将金属杆朝向远离转动电机的方向推动时,伸缩弹簧被压缩;当滑块朝向靠近转动电机的方向移动时,伸缩弹簧由于想要恢复原长,将金属杆朝向靠近转动电机的方向推动;上述过程实现了对金属杆在金属杆长度方向上位置的微调,相较于工作人员手动调整时移动位置的不稳定性,机械调整的稳定性更高,提高了对金属杆位置微调的精度,从而进一步提高了金属杆和金属板的焊接精度。
附图说明
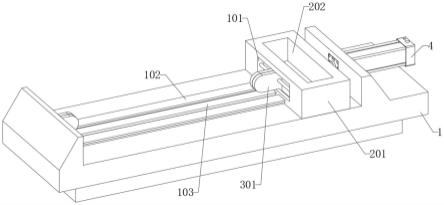
29.图1是本技术实施例一种自适应高精度焊接装置的整体结构示意图。
30.图2是本技术实施例中用于展示定位柱和定位孔的结构示意图。
31.图3是图2中a处的放大图。
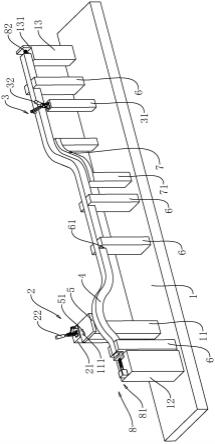
32.图4是本技术实施例中用于展示伸缩弹簧的结构示意图。
33.附图标记说明:1、安装座;11、安装柱;111、定位柱;12、第一固定柱;13、第二固定柱;131、固定板;2、第一限位组件;21、第一立柱;22、第一快速夹具;3、第二限位组件;31、第二立柱;32、第二快速夹具;4、金属杆;5、金属板;51、定位孔;6、限位板;61、限位槽;7、支撑板;71、支撑杆;8、微调机构;81、滑移组件;811、转动电机;812、螺杆;813、滑块;814、导杆;815、弹性件;82、伸缩弹簧;821、橡胶片。
具体实施方式
34.以下结合附图1-4对本技术作进一步详细说明。
35.本技术实施例公开一种自适应高精度焊接装置。参照图1和图2,自适应高精度焊接装置包括安装座1、焊接机器人、第一限位组件2和第二限位组件3,安装座1呈长方体状,安装座1上固定安装有安装柱11,金属杆4的一端向上拱起为拱起段,金属杆4的另一端向其宽度方向的一侧弯曲为弯曲段,金属杆4的其余部分为平直段,金属板5和金属杆4的拱起段焊接。金属杆4位于安装座1上,金属板5位于安装柱11上,焊接机器人用于焊接金属杆4和金属板5;安装柱11上固定安装有定位柱111,金属板5上开设有供定位柱111穿过的定位孔51,本实施例中,金属杆4和金属板5均由铝材制成。第一限位组件2包括第一立柱21和第一快速夹具22,第一立柱21固定安装于安装座1上,第一立柱21位于金属板5处,第一立柱21相较于安装柱11距金属板5更远,第一快速夹具22固定安装于第一立柱21的顶面上,第一快速夹具22用于对金属板5限位。
36.在金属板5和金属杆4的焊接位置确定后,工作人员将定位柱111穿过定位孔51后,转动第一快速夹具22的手持部使得第一快速夹具22的夹钳部与金属板5抵接,对金属板5进行限位,金属板5和金属杆4不易发生相对位移,提高了金属杆4和金属板5的焊接精度。
37.参照图1,第二限位组件3包括第二立柱31和第二快速夹具32,第二立柱31固定安
装于安装座1上,第二立柱31位于金属杆4远离金属板5的一端,第二快速夹具32固定安装于第二立柱31的顶面上,第二快速夹具32用于对金属杆4限位。工作人员转动第二快速夹具32的手持部使得第二快速夹具32的夹钳部与金属杆4远离金属板5的一端抵接,对金属杆4远离金属板5的一端进行限位,第一限位组件2和第二限位组件3配合使用,提高了金属板5和整根金属杆4位于安装座1上的稳定性,金属板5和金属杆4更不易发生相对位移,从而进一步提高了金属杆4和金属板5的焊接精度。
38.参照图1,安装座1上固定安装有多块限位板6,限位板6位于金属杆4的水平段,本实施例中,限位板6有四块且沿金属杆4的长度方向排列,限位板6竖直设置,限位板6的高度和金属杆4的高度相适配;限位板6的一端和安装座1固定连接,限位板6远离安装座1的一端开设有供金属杆4卡设的限位槽61,金属杆4的水平段卡设于限位槽61内,金属杆4的外侧壁和限位槽61的内壁抵接,限位板6既为金属杆4提供了支撑,又限制了金属杆4的位移,金属板5和金属杆4更不易发生相对位移,从而进一步提高了金属杆4和金属板5的焊接精度。
39.参照图1,安装座1上固定安装有支撑板7,支撑板7位于金属杆4的弯曲段,支撑板7的顶面和金属杆4的底面抵接,支撑板7的横截面形状与金属杆4弯曲段的形状相一致,支撑板7的两端各固定安装有一根支撑杆71,支撑杆71的一端和安装座1的顶面固定连接,支撑杆71的另一端和支撑板7的底面固定连接,支撑板7的高度和金属杆4的高度相适配,支撑板7的宽度大小大于金属杆4的宽度大小。支撑板7为金属杆4的弯曲段提供了支撑,限位板6和支撑板7配合使用,提高了整根金属杆4在长度方向上各处受力的均匀性。
40.参照图2、图3和图4,自适应高精度焊接装置还包括微调机构8,微调机构8包括滑移组件81和伸缩弹簧82,滑移组件81包括转动电机811、螺杆812、滑块813和导杆814;安装座1上靠近金属板5的一端固定安装有第一固定柱12,第一固定柱12位于金属杆4靠近金属板5一端的端部,第一固定柱12的高度和金属杆4的高度相适配;转动电机811固定安装于第一固定柱12上,转动电机811的转轴和螺杆812连接,螺杆812远离转动电机811的一端穿过滑块813且与滑块813螺纹连接,螺杆812的长度方向和金属杆4的长度方向平行;导杆814有两根且分别位于螺杆812的两侧,导杆814的一端和转动电机811固定连接,导杆814的另一端和滑块813固定连接,从而限制滑块813随螺杆812的转动而转动,滑块813通过弹性件815和金属杆4长度方向靠近金属板5的一面抵接,以减少金属杆4和滑块813之间的磨损,本实施例中,弹性件815为橡胶块,橡胶块有两块且分别位于滑块813高度方向的两端。
41.参照图1和图4,安装座1上远离金属板5的一端固定安装有第二固定柱13,第二例固定柱的高度和金属杆4的高度相适配,第二固定柱13的顶面上远离第二快速夹具32的一侧固定安装有固定板131,固定板131竖直设置,伸缩弹簧82的长度方向和金属杆4的长度方向平行,伸缩弹簧82的一端和固定板131连接,伸缩弹簧82的另一端和金属杆4长度方向远离金属板5的一面通过橡胶片821抵接,橡胶片821的设置减少了伸缩弹簧82和金属杆4之间的磨损。
42.启动转动电机811,驱动螺杆812转动,带动滑块813滑动,滑块813推动金属杆4在金属杆4的长度方向上进行微调,伸缩弹簧82与滑移组件81配合使用以使用金属杆4的移动;当滑块813将金属杆4朝向远离转动电机811的方向推动时,伸缩弹簧82被压缩;当滑块813朝向靠近转动电机811的方向移动时,伸缩弹簧82由于想要恢复原长,将金属杆4朝向靠近转动电机811的方向推动;上述过程实现了对金属杆4在金属杆4长度方向上位置的微调,
相较于工作人员手动调整时移动位置的不稳定性,机械调整的稳定性更高,提高了对金属杆4位置微调的精度,从而进一步提高了金属杆4和金属板5的焊接精度。
43.本技术实施例一种自适应高精度焊接装置的实施原理为:焊接金属板5和金属杆4前对金属板5和金属杆4进行定位时,工作人员将定位柱111穿过定位孔51后,转动第一快速夹具22的手持部使得第一快速夹具22的夹钳部与金属板5抵接,对金属板5进行限位;然后启动转动电机811,驱动螺杆812转动,使得滑块813滑动,当滑块813将金属杆4朝向远离转动电机811的方向推动时,伸缩弹簧82被压缩;当滑块813朝向靠近转动电机811的方向移动时,伸缩弹簧82由于想要恢复原长,将金属杆4朝向靠近转动电机811的方向推动,以实现对金属杆4位置的微调;最后转动第二快速夹具32的手持部使得第二快速夹具32的夹钳部与金属杆4远离金属板5的一端抵接,对金属杆4远离金属板5的一端进行限位。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。