1.本发明涉及的技术领域为,一种辅助执行纺丝装置的纺丝组件安装与拆卸的装置。
背景技术:
2.纺丝装置中的纺丝组件将计量泵送来的熔体进行过滤,并均匀地将熔体分配到每个喷丝空中。由于纺丝组件中滤网污染或者喷丝孔发生堵塞等原因,需要对纺丝组件进行更换。
3.通过人工操作进行纺丝组件的安装和拆卸会带来众多的不便,比如安装高度、工作负荷等等。
4.现有技术中的专利文献公开了若干通过辅助装置进行纺丝组件安装和拆卸的技术方案。然而,所有的专利文献披露的辅助装置一次只能进行一个纺丝组件的安装和拆卸。在需要批量进行安装的拆卸的情形下,现有技术中的结构的操作能力有明显的局限性。
技术实现要素:
5.基于上述的技术问题,本发明的目的是提供一种用于辅助执行纺丝组件安装与拆卸的辅助装置,以满足实际工况下的操作需求。因此,本发明提出如下解决方案:
6.一种用于辅助执行纺丝组件安装与拆卸的辅助装置,具有位移机构以及可伸出和回缩的手臂机构,其中,所述位移机构可携带所述手臂机构运动到指定位置,所述手臂机构具有近侧端和远侧端,其中,所述近侧端与所述位移机构相连,所述远侧端设有操作机构,其中,所述操作机构包括多个操作单元,所述多个操作单元彼此隔开以与多个纺丝组件配合。
7.上述相互隔开设置的操作单元可同时进行多个纺丝组件的安装和拆卸,更适合实际工况下操作。不管实际工况下需要同时多个纺丝组件全部进行安装或拆卸,或者是部分进行安装或拆卸,都只需要所述辅助装置进行一次操作。
8.进一步地,所述手臂机构的远侧端承载有支撑板并且所述支撑板上设有所述操作机构的多个操作单元。
9.每个所述操作单元具备可竖向活动的轴部和位于所述轴部顶端的托盘部;和每个所述操作单元的所述轴部通过柔性支撑机构被支撑在所述操作单元的支撑部件上。
10.由于多个纺丝组件的安装位置可能无法与所述多个操作单元的位置完全吻合,这时,所述柔性支撑机构可使得所述操作单元的位置可被微调。微调的方向为所述操作单元的四周方向。微调后,可确保所有的所述操作单元可与各自的纺丝组件安装位置接合。
11.为了实现所述操作单元的微调,具体地,所述柔性支撑机构主要包括所述托盘部和所述支撑部件之间的弹性件、位于所述轴部的周向件与所述支撑部件之间的柔性垫以及位于所述柔性垫下方的环箍,其中,所述环箍的内表面具有一坡面。
12.所述托盘部的上表面沿着圆周方向布置有多个销,以及多个与所述销错开布置的
磁性件。
13.所述销可以插入所述纺丝组件下表面的孔中,因此可以保证所述纺丝组件不会滑下,并且所述磁性件的磁力可以进一步确保所述纺丝组件不会滑下。
14.所述多个操作单元被横向约束在稳定板里,所述稳定板开有与所述操作元件的所述托盘部对应的圆形孔,所述圆形孔的面积比所述托盘部的面积略大。
15.这么设置的原因是,需要留出一定的空间供所述托盘部进行位置的微调,同时所述稳定板也对所述操作单元进行相应地约束,使所述轴部无法过多地摆动。
16.至少一个所述操作单元进一步具有锁定机构,将所述轴部沿着竖向锁定;所述锁定机构包括设置在所述轴部本体的圆周上的凹槽,以及与所述轴部本体垂直设置的旋转体,其中,所述旋转体从轴向上看为切掉一部分的圆。
17.当所述托盘部上没有承载纺丝组件时,所述托盘部在所述弹性件的作用下会高出所述稳定板的表面,此时的稳定板无法对所述托盘部起到约束的作用。因此该锁定机构能够对未承载纺丝组件时的所述轴部进行锁定。
18.所述位移机构可在一定高度上的轨道上移动,所述轨道的下方具有部分包围所述轨道的防护罩。
19.这是安全设置,如果有任何零部件从所述轨道的安装位置掉落,所述防护罩可以接住该零部件。
附图说明
20.附图1示意性地示出本发明的所述辅助装置的结构;
21.附图2为本发明的所述操作机构的结构示意图;
22.附图3为所述操作单元的剖视示意图;
23.附图4为所述环箍与所述轴部的局部放大图;
24.附图5为所述操作单元的局部示意图;
25.附图6为示出所述锁定机构的所述操作单元的剖视图。
具体实施方式
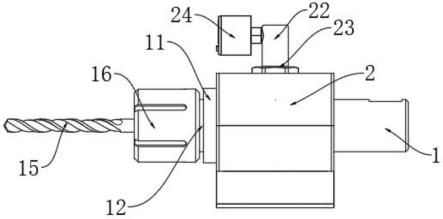
26.根据示意性示出本发明的辅助装置的附图1,所述辅助装置主要由位移机构2和手臂机构1构成。所述位移机构2在轨道18上移动,该移动可通过人工进行推动或者通过驱动装置进行驱动。所述轨道18的延伸方向与纺丝位的布置方向基本平行,而所述手臂机构1与所述轨道18呈基本垂直设置,以使得所述手臂机构1能接近纺丝组件安装位置。
27.所述辅助装置的所述手臂机构1的上下移动、水平旋转以及伸出和回缩都在现有技术中得到详尽的描述,所以本发明不再对其进行同样的描述。
28.所述手臂机构1具有远侧端1.1和近侧端1.2。所述近侧端1.2与所述位移机构2固定,从而所述位移机构2可携带所述手臂机构1移动到需要的位置。所述远侧端1.1设有操作机构3。所述操作机构的特点是,所述操作机构3的所述远侧端1.2承载有支撑板5并且所述支撑板5上设有所述操作机构3的多个操作单元4,所述操作单元4彼此隔开。在该实施例中,操作单元的数量为6个。因此,在处理具有6个纺丝组件的纺丝位时,可以一次性进行安装或拆卸。
29.附图2为操作机构的示意图。所述操作机构3的多个所述操作单元4之间的距离对应多个纺丝组件之间的距离设定。但是,实际安装和拆卸过程中,会出现需要操作单元4之间的位置可以微调的情况,为此,所述所述操作单元4需要通过柔性支撑机构被支撑,为了能微调所述操作单元之间的距离。
30.附图3为所述操作单元4的剖视示意图。结合附图2和附图3,每个所述操作单元4具有轴部7和托盘部4.1,其中,所述托盘部4.1位于所述轴部7的顶端。所述轴部7以可竖向活动的方式设置,其底端被设计成便于旋转的结构,例如附图3所示的具有六角的结构。所述托盘部4.1用于安装过程中或者拆卸过程中放置纺丝组件。所述托盘部4.1的上表面沿着其圆周方向布置有多个销8,以及多个与所述销8错开布置的磁性件9。所述销8可以插入所述纺丝组件下表面的孔中,因此可以保证所述纺丝组件不会从所述托盘部4.1滑下,所述磁性件9的磁力可以进一步确保所述纺丝组件不会落下。
31.柔性支撑机构包括弹性件15,柔性垫12以及环箍13。进一步如附图3所示,所述轴部7的外部套设有所述弹性件15,在该实施例中,所述弹性件15为压缩弹簧,所述压缩弹簧15安装在所述托盘部4.1和支撑部件10之间。所述柔性垫12位于所述轴部7的周向件11与所述支撑部件10之间,其中,所述柔性垫12优选为硅胶垫。所述环箍13位于所述支撑部件10的下方,并且所述环箍13的内表面具有一坡面14。如附图4所示,附图4为所述环箍13与所述轴部7的局部放大图,所述坡面14的底端用于约束所述轴部7的沿圆周方向的晃动,由于从所述坡面14的底端开始往上,所述轴部7开始不受约束。因此,所述轴部7的上半部分可沿圆周方向晃动。由于所述柔性垫12可变形的特点,所述轴部7的上半部可微微摆动,使得当在正常状态下多个所述托盘部中一些无法对准所述纺丝组件时,所述托盘部4.1可被微调。
32.如附图1和2所示,所述多个操作单元4被横向约束在稳定板6里。所述稳定板6开有与所述操作元件4的所述托盘部4.1对应的圆形孔,所述圆形孔的面积比所述托盘部的面积略大。这么设置的原因是,需要留出一定的空间供所述托盘部4.1进行位置的微调,同时所述稳定板6也对所述操作元件4进行相应的约束,使所述轴部7无法过多地摆动。所述稳定板6与所述支撑板5通过杆件固定连接。所述稳定板6的安装高度是这样设定的:当所述托盘部4.1承载有纺丝组件时,所述弹性件15被压缩,此时托盘部4.1的位置与所述稳定板6处在同一水平面上,这种情况下,所述稳定板6被约束在所述稳定板6的圆形孔中。当所述托盘部4.1上没有承载纺丝组件时,所述托盘部4.1在所述弹性件15的作用下会高出所述稳定板6的表面,此时的稳定板6无法对所述托盘部4.1起到约束的作用。
33.基于此,至少一个所述操作单元4进一步具有锁定机构23,将所述轴部7沿着竖向锁定。
34.附图5为示出所述锁定机构的所述操作单元的局部示意图。附图6为所述锁定机构23的剖视图。所述锁定机构23包括设置在所述轴部7本体的圆周上的凹槽16,以及与所述轴部7本体垂直设置的旋转体17,其中,所述旋转体17从轴向上看为切掉一部分的圆。所述旋转体17与手柄24固定连接,通过操作所述手柄24即可实现旋转体的旋转。如附图5所示的状态下,所述旋转体17被旋转到进入所述轴部7本体上的所述凹槽16中,此状态下的所述轴部7的竖向移动被限制,因此,即使是在没有承载任何纺丝组件的情况下,所述托盘部4.1也不会高于所述稳定板6。如果需要释放对所述轴部7竖向移动的限制,进一步旋转所述旋转体17以使所述的旋转体17不再插入所述凹槽16中。
35.在考虑本发明的装置的安全性时,本发明进一步具有防护罩17。所述防护罩17位于所述轨道18的下方并部分包围所述轨道18。如果有任何零部件从所述轨道18的安装位置掉落,所述防护罩17可以接住该零部件,并且所述防护罩17与所述轨道18的间距这样设置:当所述导轨18连接件螺钉松动造成导轨变形时,所述位移机构2将无法移动,强制操作人员进行检查。
36.为了进一步确保所述辅助装置的安全性,所述手臂机构1的上下位移通过气缸21的驱动获得,立柱套件20套设在立柱19上。所述立柱19上开有未示出的小孔,所述立柱套件20的下端设有未示出的弹性销,当所述手臂机构抬起到一定高度后,所述弹性销将插入所述立柱19上的小孔中,对所述手臂机构进行安全固定,这样即使气控单向阀突然失效,所述弹性销能防止手臂机构突然坠落。
37.下面将以纺丝组件的安装为例对所述辅助装置的动作进行说明。所述辅助装置的多个操作单元4上放置多个所述纺丝组件。所述辅助装置在外部推力的影响下移动到需要进行纺丝组件安装的位置,所述辅助装置的控制器22控制所述辅助装置的所述手臂机构1进行伸出,直到所述手臂机构1的所述操作机构3位于所述纺丝组件安装位置的正下方。接着,所述控制器2控制所述气缸21抬起所述手臂机构1,直到所述纺丝组件与纺丝组件安装孔对接。在进行对接的过程中,因为所述柔性支撑机构的作用,即使出现位置少量误差的情况,仍可对所述操作单元4进行微调,以使所述纺丝组件能进入纺丝组件安装孔中。最后,通过旋转所述轴部7的最下端,所述纺丝组件可被旋转进入纺丝组件安装孔进行最终的固定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。