1.本发明涉及用于执行自动泊车操作的泊车辅助系统,泊车辅助系统可以借助于移动通信设备(例如具有适当智能手机软件的智能手机)从机动车外部进行遥控。
背景技术:
2.众所周知,可由移动通信设备操控的泊车辅助系统可以用于自动泊车,例如用于泊入车头停车位(例如可正面驶入的单个车库)。在此,移动通信设备通过无线电直接(例如通过蓝牙)或间接(例如通过蜂窝网络)与机动车连接。例如,如果车辆停在车头停车位前,则车辆外部的用户可以通过操作移动通信设备将车辆泊入停车位内。通过遥控器可以在系统的每次实施中例如进行自动泊车操作的启动和停止,或选择行驶方向。泊车辅助系统自动控制例如驱动扭矩、行车制动器、档位选择和转向。
3.在wo2013/053776a2中说明了用于自动泊入车头停车位的可通过遥控器操作的泊车辅助系统,其中遥控器包括用于控制向前行驶的操控元件和用于控制向后行驶的操控单元。如果车辆停在车头停车位前,则用户可以从车辆外部通过操纵用于控制向前行驶的操控元件将具有自动纵向控制和自动横向控制的车辆驶入停车位。
4.在文件de102015209976a1、de102015208123a1、de102015208124a1和de10206226008a1中说明了可以从机动车外部由移动通信设备操控的其他自动泊车辅助系统。
5.对于遥控器,只要使用带有触摸屏(touchscreen)和用于控制车辆功能的合适移动应用软件(app)的商用智能手机形式的移动通信设备,则必须确保通过此类智能手机进行的遥控是安全的。例如,如果用户未在触摸屏上执行相应的输入,则不允许向车辆系统发送执行行驶功能的错误输入信息。
技术实现要素:
6.本发明的目的是设计一种具有(特别是通过智能手机)可遥控的泊车辅助系统的特别安全的自动泊车过程。
7.通过独立权利要求的特征实现该目的。在从属权利要求中说明了有利的实施方式。应指出的是,从属于独立权利要求的权利要求的附加特征在没有独立权利要求的特征或者仅在与独立权利要求的特征子集相组合的情况下可构成独立于独立权利要求的所有特征组合的单独发明,其可以成为独立权利要求、分案申请或后续申请的主题。这同样适用于说明书中所述的技术理论,其可形成独立于独立权利要求的特征的发明。
8.本发明的第一方面涉及一种用于激活机动车(特别是乘用车)的自动泊车操作的方法,该自动泊车操作通过泊车辅助系统执行。泊车辅助系统可以借助于移动通信设备(特别是智能手机)从机动车外部进行遥控。该方法包括以下步骤:
9.–
通过移动通信设备(例如在触敏屏幕上)输出指令,以便在用户侧执行移动通信设备的预定激活移动(例如将设备倾斜到特定位置);
10.–
借助于通信设备侧的传感器系统(例如加速度传感器、陀螺仪、磁强计),确定对通信设备的激活移动敏感的第一传感器信息(例如加速度信息、转速信息、磁场信息);
11.–
基于第一传感器信息,检测利用移动通信设备执行的移动通信设备激活移动;并且
12.–
根据对移动通信设备的激活移动的检测,激活泊车操作。
13.可以规定,在识别出激活移动后,准备泊车操作的车辆功能已进行初始化,例如释放驻车制动器并且启动驱动引擎。为了在泊车操作的情况下开始车辆移动,除了已进行的激活移动之外,还可能需要用户的进一步操作动作(或其他条件的存在),例如,以预定方式触摸用于遥控的智能手机的屏幕(例如在屏幕上执行预定的圆圈移动或在预定的屏幕区域中触摸屏幕)。
14.有利的是,在输出指令以执行移动通信设备的激活移动之前,需要用户在移动通信设备上进行一个或多个操作动作,例如在智能手机上启动应用程序、在应用程序中选择泊车功能、选择通过应用程序提供的泊车操作、按下智能手机屏幕上的预定区域(“继续”)。
15.根据本发明的方法基于以下想法,即用户必须利用移动通信设备执行预定的激活手势来激活泊车操作,例如必须以预定的方式倾斜智能手机。由此大大降低了对泊车操作的不期望的激活的可能性,并且根据激活手势的复杂性几乎排除了这种可能性。
16.从现有技术中通常已知的是,在自动泊车操作期间借助智能手机侧的传感器系统(例如加速度传感器)确定传感器信息以提高安全性,并且使得泊车操作的继续进行取决于所检测的传感器信息。在此,传感器信息优选传输到车辆侧的泊车辅助系统,其根据传感器信息影响泊车操作的执行。例如,如果在泊车操作期间所检测的加速度信息表明智能手机掉落或在泊车操作过程中剧烈晃动,则在泊车辅助系统侧可以立即停止泊车操作。
17.如果在本发明的应用中也提供了这样的方法,则待执行的激活移动可以同时用于两个目的:
18.1.如上所述:根据本发明,通过使得泊车操作的激活取决于移动通信设备的激活移动的执行来提高安全性。
19.2.此外:检验通信设备侧传感器系统的功能性,并且必要时通过直接或间接的通信链路向泊车辅助系统正确地提供传感器信息。
20.因此,如果在自动泊车操作期间借助于通信设备侧的传感器系统(例如加速度传感器)确定与第一传感器信息(例如加速度信息)有相同信息类型的第二传感器信息(例如加速度信息),并且泊车操作的执行取决于第二传感器信息,则激活移动同时用于两个目的。
21.预定的激活移动优选地包括倾斜移动,优选围绕平行于智能手机屏幕的水平延伸(或纵向延伸)的轴,前提是智能手机的相关应用程序为纵向格式(或横向格式)的应用程序。
22.预定的激活移动有利地包括倾斜移动到预定位置。在此并非必须要识别为这样的倾斜移动(例如通过评估集成陀螺仪的转速信息)。例如,就达到预定位置而言,满足特定标准就足够了。
23.激活移动优选地包括将智能手机倾斜到第一位置,在该位置中,智能手机的屏幕平面基本上平行于地面,并且屏幕位于智能手机的背离地面的一侧。在此可以规定,用户不
一定必须将智能手机倾斜到第一位置,而是倾斜到第一位置之前的一个位置已经可被接受(例如在屏幕平面和地面之间成20
°
的角度)。
24.替代地或附加地,激活移动包括将智能手机倾斜到第二位置,在第二位置中,智能手机的屏幕平面基本上垂直于地面,特别是在应用程序呈纵向格式的情况下智能手机屏幕的高度延伸垂直于地面(其中智能手机顶部朝上)。在此可以规定,用户不一定必须将智能手机倾斜到第二位置,而是倾斜到第二位置之前的一个位置已经可被接受(例如在屏幕平面和地面之间成70
°
的角度)。
25.有利的是,激活移动包括至少两个部分移动,即倾斜到第一位置,然后倾斜到第二位置,反之亦然。在此可以考虑的是,根据智能手机的初始定向来决定首先必须将智能手机倾斜到第一位置还是第二位置,然后必须将智能手机倾斜到相应的另一位置。
26.在这种情况下,还可考虑的是,激活移动包括例如至少三个部分移动,例如倾斜到第一位置,然后倾斜到第二位置,之后再次倾斜到第一位置(或者替代地,倾斜到第二位置,然后倾斜到第一位置,之后再次倾斜到第二位置)。
27.输出用于执行激活移动的指令的步骤可以包括至少两个子步骤,例如:
28.–
在倾斜到第一位置之前,输出将智能手机倾斜到第一位置的指令;并且
29.–
在倾斜到第二位置之前,输出将智能手机倾斜到第二位置的指令。
30.在一个优选的实施例中,智能手机包括:
31.–
x方向加速度传感器,用于确定在与屏幕的宽度延伸平行的x方向上的x方向加速度信息,
32.–
y方向加速度传感器,用于确定在与屏幕的高度延伸平行的y方向上的y方向加速度信息,和
33.–
z方向加速度传感器,用于确定在正交于屏幕平面的z方向上的z方向加速度信息。
34.在这种情况下,对激活移动的检测被分为至少两个部分检测:
35.1.检测智能手机倾斜到第一位置,其中检测倾斜到第一位置的步骤包括:
36.a.检验y方向加速度信息是否满足第一标准(例如在y方向上测量的加速度小于或小于等于第一阈值a
low
),特别是持续大于或大于等于时间阈值(例如1s)的时间段;并且
37.b.检验z方向加速度信息是否满足第二标准(例如在z方向上测量的加速度大于或大于等于第一阈值a
up
),特别是持续大于或大于等于时间阈值(例如1s)的时间段,并且
38.2.检测智能手机倾斜到第二位置,其中检测倾斜到第二位置的步骤包括:
39.a.检验y方向加速度信息是否满足第二标准(例如在y方向上测量的加速度大于或大于等于第一阈值a
up
),特别是持续大于或大于等于时间阈值(例如1s)的时间段;并且
40.b.检验z方向加速度信息是否满足第一标准(例如在z方向上测量的加速度小于或小于等于第一阈值a
low
),特别是持续大于或大于等于时间阈值(例如1s)的时间段。
41.如果智能手机在激活移动的范畴内仅需置于两个位置中的一个位置处,则仅执行上述两个部分检测1.和2.中的一个。
42.原则上,为了提高安全性而有利的是,激活移动的检测不是由智能手机本身进行,而是将由智能手机检测到的第一传感器信息通过无线通信链路(例如通过蓝牙或移动网络,在第二种情况下必要时也通过中间后端服务器)传输到车辆侧的泊车辅助系统,并且在
车辆侧的泊车辅助系统侧基于所传输的第一传感器信息进行激活移动的检测。
43.第二方面涉及一种(借助于移动通信设备从机动车外部)可遥控的用于执行自动泊车操作的车辆侧的泊车辅助系统,其中可以根据移动通信设备的预定用户侧的激活移动来激活泊车操作。
44.系统被设置为执行以下所述的各种活动。这通常借助于一个或多个电子控制器来进行,这些控制器通过一个或多个软件程序控制并且以根据本发明的方式工作。
45.根据本发明的泊车辅助系统被设置为,
46.–
接收对激活移动敏感的、借助于通信设备侧的传感器系统确定的第一传感器信息,
47.–
基于第一传感器信息检测移动通信设备的激活移动,并且
48.–
根据对激活移动的检测来激活泊车操作。
49.根据本发明第一方面的本发明方法的上述陈述也以相应的方式适用于根据本发明第二方面的本发明泊车辅助系统。在此处且在权利要求中未明确说明的根据本发明的泊车辅助系统的有利实施例相应于上述或在权利要求中所述的根据本发明的方法的有利实施例。
50.本发明的第三方面涉及用于软件控制的车辆侧的泊车辅助系统的具有程序代码的软件,当该软件在软件控制的车辆侧的泊车辅助系统上运行时,该程序代码用于执行根据本发明第一方面的方法的一个或多个步骤。
51.车辆侧的泊车辅助系统的软件例如用于执行根据本发明的方法的以下步骤:
52.–
基于第一传感器信息检测利用移动通信设备执行的移动通信设备的激活移动;并且
53.–
根据对移动通信设备的激活移动的检测,激活泊车操作。
54.本发明的第四方面涉及用于软件控制的移动通信设备的具有程序代码的软件,特别是(通过用于各种应用程序的数字销售平台提供的)用于智能手机的应用程序,当该软件在软件控制的移动通信设备上运行时,该程序代码用于执行根据本发明第一方面的方法的一个或多个步骤。
55.用于移动通信设备的软件例如用于执行根据本发明的方法的以下步骤:
56.–
通过移动通信设备输出指令,以便在用户侧执行移动通信设备的预定激活移动;并且
57.–
借助于通信设备侧的传感器系统,确定对通信设备的激活移动敏感的第一传感器信息。
附图说明
58.下面参考附图借助于实施例说明本发明。其中:
59.图1示出了根据本发明的方法的示例性流程图;
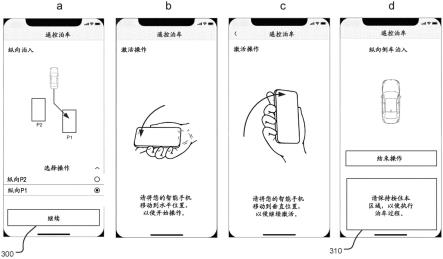
60.图2示出了智能手机上的示例性屏幕输出;并且
61.图3示出了智能手机加速度传感器的示例性传感器信号。
具体实施方式
62.在图1中,示出了根据本发明的用于激活自动泊车操作的方法的示例性流程图。泊车辅助系统可借助于智能手机从机动车外部进行遥控。为了遥控泊车辅助系统,在智能手机上安装有应用程序。
63.在步骤100中,在用户侧通过智能手机进行操作选择。在图2a中,示出了在智能手机触敏屏幕上显示的呈纵向格式的用于操作选择的示例性用户界面。在这种泊车情况下,可以为用户提供两个可泊车的停车位p1和p2以进行选择。如果用户选择了泊车操作并且用户触摸了“继续”的操作面板300,则将准备激活泊车操作。
64.为此,在步骤110中,通过智能手机向用户发出指令,将智能手机倾斜到与地面平行的第一水平位置且屏幕侧朝上。智能手机上的相应屏幕输出如图2b所示(参见智能手机的水平位置和表示倾斜移动的箭头)。将智能手机倾斜到水平位置的说明也可以被设计为动画。在多个部分移动的情况下(在此倾斜到水平位置并且之后倾斜到垂直位置),动画可以已显示整个移动或仅显示第一部分移动。
65.在步骤120中,借助于智能手机侧的加速度传感器在智能手机中检测加速度信息,并且通过无线通信链路(例如蓝牙)将其传输到车辆侧的泊车辅助系统。
66.智能手机侧的加速度传感器系统包括:
67.–
x方向加速度传感器,用于确定在与屏幕的宽度延伸平行的x方向上的x方向加速度a
x
,
68.–
y方向加速度传感器,用于确定在与屏幕的高度延伸平行的y方向上的y方向加速度ay,和
69.–
z方向加速度传感器,用于确定在正交于屏幕平面的z方向上的z方向加速度az。
70.加速度是也考虑到重力加速度g的加速度,即加速度传感器也感测到重力加速度,从而在传感器测量方向的定向与重力加速度平行的情况下,静止的加速度传感器始终显示1g(≈9.81m/s2)的加速度。
71.在步骤130中,车辆侧的泊车辅助系统检验智能手机是否已倾斜到水平位置。
72.为了检测智能手机向水平位置的倾斜,将检验:
73.a)y方向加速度ay是否小于下限阈值a
low
(a
low
<0.5g,例如a
low
=0.1g)(即ay<a
low
),更确切地持续大于时间阈值δt的不间断时间段,以及
74.b)z方向加速度az是否大于上限阈值a
up
(a
up
》0.5g,例如a
up
=0.9g)(即az》a
up
),更确切地持续大于时间阈值δt的不间断时间段。
75.如果满足两个条件a)和b),则由此检测出智能手机倾斜到水平位置。在图3中,示出了在平行于屏幕高度延伸的y方向上的y方向加速度ay和在垂直于屏幕平面的z方向上的z方向加速度az的示例性曲线。在时间点t1之前,用户将智能手机倾斜地置于其面前,从而用户从斜上方看向屏幕。在时间点t1,用户开始将智能手机倾斜(围绕与智能手机屏幕的横向延伸基本平行的轴线进行倾斜移动)至大致水平的位置(屏幕背离地面)。y方向加速度ay朝零的方向减小,并且z方向加速度az朝1g的方向增大。在时间点t2确认在大于δt的不间断时间段内y方向加速度ay小于下限阈值a
low
并且z方向加速度az大于上限阈值a
up
。由此识别出智能手机已倾斜到基本水平的位置(屏幕背离地面)。
76.如果在图1中的步骤130中没有检测到水平位置,则将继续检验是否达到水平位
置,直到超过预定的时间(参见问询140“超时”)。
77.如果在步骤130中检测到了水平位置,则在步骤150中向用户发出将智能手机倾斜到垂直位置(智能手机顶部向上)的指令。智能手机上的相应屏幕输出如图2c所示(参见智能手机的垂直位置和表示倾斜移动的箭头)。
78.在步骤160中,如在步骤120中一样,在智能手机中借助于智能手机侧的加速度传感器系统检测加速度信息,并且通过无线通信链路(例如蓝牙)传输到车辆侧的泊车辅助系统。
79.在步骤170中,在车辆侧的泊车辅助系统中检验智能手机是否已倾斜到垂直位置。
80.为了检测智能手机倾斜到垂直位置,将检验:
81.c)y方向加速度ay是否大于上限阈值a
up
,更确切地持续大于时间阈值δt的不间断时间段,以及
82.d)z方向加速度az是否小于下限阈值a
low
(即az》a
up
),更确切地持续大于时间阈值δt的不间断时间段。
83.如果满足两个条件c)和d),则由此检测出智能手机倾斜到垂直位置。
84.在图3中,在时间点t3,用户开始将智能手机从水平位置倾斜到垂直位置。y方向加速度ay朝零的方向减小,并且z方向加速度az朝1g的方向增大。在时间点t4确认在大于δt的时间段内y方向加速度ay大于上限阈值a
up
,并且z方向加速度az小于下限阈值a
low
。由此识别出智能手机已倾斜到基本垂直的位置。
85.如果在步骤170中检测到了垂直位置,则用户已执行了预定的整个激活移动,并且泊车操作被激活。为此,在步骤180中首先启动驱动引擎,并且释放行车制动器。根据步骤190,为了在泊车操作的范畴中开始移动,还必须按下安全按钮,其中在泊车操作期间必须继续按下安全按钮以防止泊车操作中断。为此,随着泊车操作的激活,在智能手机的屏幕上会标记出区域310(参见图2d),其用作安全按钮并且必须被用户持续触摸。
86.此外,在泊车操作期间,将x方向加速度a
x
、y方向加速度ay和z方向加速度az定期传输至车辆侧的泊车辅助系统。泊车操作的继续进行取决于所传输的加速度信息。例如,如果在泊车操作期间所传输的加速度信息表明智能手机掉落或者在泊车操作过程中智能手机剧烈摇晃,则在泊车辅助系统侧会立即停止泊车操作。
87.通过智能手机的加速度传感器系统对激活移动的检测还用于检验智能手机侧加速度传感器系统的功能性以及在泊车操作之前就已通过通信链路向泊车辅助系统正确地提供加速信息。
88.在该实施例中,对于激活手势的检测,仅评估了y方向加速度ay和z方向加速度az。然而还可以考虑的是,对于上述两部分倾斜激活手势的检测,还提出对x方向加速度a
x
的要求,以便也检验x方向加速度传感器(例如在整个两部分倾斜手势期间a
x
《a
low
)。替代地或附加地,可以扩展倾斜激活手势,以便确定x方向加速度传感器的信号变化来检验x方向加速度传感器(例如将智能手机倾斜到横向定向)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。