1.本实用新型涉及塑胶瓶盖加工技术领域,尤其涉及塑胶瓶盖加工用贴标装置。
背景技术:
2.塑料盖是瓶、罐、桶类包装的常用封装形式,尤其在饮料、化工、医药领域的应用更为广泛,根据其用途可分为透气塑料盖和不透气塑料盖。
3.与现有技术相比较存在的问题:在塑胶瓶盖加工过程中需要对其进行贴标操作,现有的贴标方式大多采用人工流水线进行操作,需要耗费大量的人力成本,人工操作会出现贴标不准确的情况,影响产品的加工质量,为此,我们提出了塑胶瓶盖加工用贴标装置,用于解决上述问题。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供塑胶瓶盖加工用贴标装置。
5.本实用新型解决其技术问题是通过以下技术方案实现的:包括安装座,所述安装座的内部设置有放置机构,所述安装座的侧壁设置有输送机构,所述安装座顶部的边缘设置有搬运机构,所述安装座的顶部设置有贴标机构,所述贴标机构包括贴标支架,所述贴标支架通过螺栓固定于安装座的顶部,所述贴标支架的顶部设置有液压杆,所述液压杆的底部设置有移动座,所述移动座的底部转动连接有导向滚轴,所述移动座的外侧设置有卷轮支架,所述卷轮支架的一侧设置有收卷马达,所述收卷马达的输出端设置有安装轴,所述移动座的底部设置有电动伸缩杆b,所述电动伸缩杆b的底部设置有压块,所述贴标支架的一侧设置有控制器。
6.作为本实用新型再进一步的方案:所述安装座的底部设置有支撑底座,所述支撑底座的一侧设置有控制机构。
7.作为本实用新型再进一步的方案:所述安装座的内壁设置有多个散热风扇,所述安装座的外侧设置有多个透气格栅。
8.作为本实用新型再进一步的方案:所述放置机构包括伺服电机,所述伺服电机通过螺栓固定于安装座的内壁,所述伺服电机的输出端设置有旋转盘,所述旋转盘的顶部设置有多个放置槽。
9.作为本实用新型再进一步的方案:所述输送机构包括输送支架,所述输送支架通过螺栓固定于安装座的外侧,所述输送支架的一侧设置有输送马达,所述输送支架的内壁转动连接有多个滚轴,所述输送马达的输出端与滚轴固定连接,所述滚轴的外侧设置有输送带。
10.作为本实用新型再进一步的方案:所述搬运机构包括搬运电机,所述搬运电机通过螺栓固定于安装座的顶部,所述搬运电机的输出端设置有旋转底座,所述旋转底座的顶部设置有搬运支架,所述搬运支架的顶部设置有一对电动伸缩杆a,一对所述电动伸缩杆a的底部均设置有吸盘。
11.作为本实用新型再进一步的方案:所述控制机构包括连接座,所述连接座通过螺栓固定于支撑底座的一侧,所述连接座的顶部设置有控制主机,所述控制主机的一侧设置有控制按钮,所述控制主机靠近控制按钮的一侧设置有显示屏。
12.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
13.本装置通过设置有散热风扇配合透气格栅对伺服电机进行散热操作,保证装置运行的稳定性;通过设置有搬运机构,电动伸缩杆a启动,电动伸缩杆a带动吸盘移动,吸盘将塑胶瓶盖吸附,搬运电机启动,搬运电机带动旋转底座转动,旋转底座转动带动搬运支架转动,搬运支架转动将塑胶瓶盖搬运至放置槽内部,放置机构、输送机构和搬运机构配合实现对塑胶瓶盖自动化搬运操作,提高了装置的自动化程度;设置有贴标机构,将贴纸卷固定在一个安装轴上,贴纸的一端绕过一对导向滚轴固定在另一个安装轴上,启动收卷马达,收卷马达带动安装轴转动,安装轴对贴合后的贴纸卷进行收集,液压杆通过液压带动移动座移动,移动座通过一对导向滚轴将贴纸贴紧塑胶瓶盖,电动伸缩杆b启动,电动伸缩杆b带动压块移动,压块将贴纸贴合在塑胶瓶盖上,放置机构、输送机构、搬运机构和贴标机构配合实现对塑胶瓶盖的自动化贴标操作,代替人工操作,降低了人力成本的消耗,提高了贴标操作的自动化程度和准确度,进而提高了产品的加工质量。
附图说明
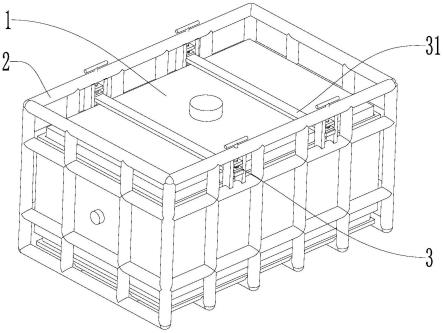
14.图1示出了根据本实用新型实施例提供的轴测结构示意图;
15.图2示出了根据本实用新型实施例提供的轴测剖视结构示意图;
16.图3示出了根据本实用新型实施例提供的图2中a部位放大结构示意图;
17.图4示出了根据本实用新型实施例提供的主视剖视结构示意图;
18.图5示出了根据本实用新型实施例提供的图4中b部位放大结构示意图。
19.图例说明:
20.100安装座、110支撑底座、120散热风扇、130透气格栅、210伺服电机、220旋转盘、221放置槽、310输送支架、320输送马达、330滚轴、340输送带、410搬运电机、411旋转底座、420搬运支架、430电动伸缩杆a、431吸盘、510贴标支架、520液压杆、530移动座、531导向滚轴、540卷轮支架、550收卷马达、551安装轴、560电动伸缩杆b、561压块、570控制器、610连接座、620控制主机、621控制按钮、622显示屏。
具体实施方式
21.请参阅图1-5,本实用新型提供一种技术方案:包括安装座100,所述安装座100的内部设置有放置机构,所述安装座100的侧壁设置有输送机构,所述安装座100顶部的边缘设置有搬运机构,所述安装座100的顶部设置有贴标机构,所述贴标机构包括贴标支架510,所述贴标支架510通过螺栓固定于安装座100的顶部,所述贴标支架510的顶部通过螺栓固定有液压杆520,所述液压杆520的底部通过螺栓固定有移动座530,所述移动座530的底部转动连接有导向滚轴531,所述移动座530的外侧通过螺栓固定有卷轮支架540,所述卷轮支架540的一侧通过螺栓固定有收卷马达550,所述收卷马达550的输出端固定有安装轴551,所述移动座530的底部固定有电动伸缩杆b560,所述电动伸缩杆b560的底部固定有压块561,所述贴标支架510的一侧通过螺栓固定有控制器570;通过设置有放置机构对塑胶瓶盖
进行固定,设置有输送机构和搬运机构对塑胶瓶盖进行搬运,设置有贴标机构,将贴纸卷固定在一个安装轴551上,贴纸的一端绕过一对导向滚轴531固定在另一个安装轴551上,启动收卷马达550,收卷马达550带动安装轴551转动,安装轴551对贴合后的贴纸卷进行收集,液压杆520通过液压带动移动座530移动,移动座530通过一对导向滚轴531将贴纸贴紧塑胶瓶盖,电动伸缩杆b560启动,电动伸缩杆b560带动压块561移动,压块561将贴纸贴合在塑胶瓶盖上,放置机构、输送机构、搬运机构和贴标机构配合实现对塑胶瓶盖的自动化贴标操作,代替人工操作,降低了人力成本的消耗,提高了贴标操作的自动化程度和准确度,进而提高了产品的加工质量。
22.具体的,所述安装座100的底部通过螺栓固定有支撑底座110,所述支撑底座110的一侧设置有控制机构;通过设置有支撑底座110对装置起到支撑的作用。
23.具体的,所述安装座100的内壁通过螺栓固定有多个散热风扇120,所述安装座100的外侧设置有多个透气格栅130;通过设置有散热风扇120配合透气格栅130对伺服电机210进行散热操作,保证装置运行的稳定性。
24.具体的,所述放置机构包括伺服电机210,所述伺服电机210通过螺栓固定于安装座100的内壁,所述伺服电机210的输出端固定有旋转盘220,所述旋转盘220的顶部设置有多个放置槽221;通过设置有放置机构,伺服电机210启动,伺服电机210带动旋转盘220转动,旋转盘220对塑胶瓶盖进行运输。
25.具体的,所述输送机构包括输送支架310,所述输送支架310通过螺栓固定于安装座100的外侧,所述输送支架310的一侧通过螺栓固定有输送马达320,所述输送支架310的内壁转动连接有多个滚轴330,所述输送马达320的输出端与滚轴330固定连接,所述滚轴330的外侧设置有输送带340;通过设置有输送机构,将塑胶瓶盖放置在一个输送带340上,输送马达320启动,输送马达320带动滚轴330转动,滚轴330通过输送带340对塑胶瓶盖进行输送。
26.具体的,所述搬运机构包括搬运电机410,所述搬运电机410通过螺栓固定于安装座100的顶部,所述搬运电机410的输出端固定有旋转底座411,所述旋转底座411的顶部通过螺栓固定有搬运支架420,所述搬运支架420的顶部通过螺栓固定有一对电动伸缩杆a430,一对所述电动伸缩杆a430的底部均固定有吸盘431;通过设置有搬运机构,电动伸缩杆a430启动,电动伸缩杆a430带动吸盘431移动,吸盘431将塑胶瓶盖吸附,搬运电机410启动,搬运电机410带动旋转底座411转动,旋转底座411转动带动搬运支架420转动,搬运支架420转动将塑胶瓶盖搬运至放置槽221内部,放置机构、输送机构和搬运机构配合实现对塑胶瓶盖自动化搬运操作,提高了装置的自动化程度。
27.具体的,所述控制机构包括连接座610,所述连接座610通过螺栓固定于支撑底座110的一侧,所述连接座610的顶部固定有控制主机620,所述控制主机620的一侧设置有控制按钮621,所述控制主机620靠近控制按钮621的一侧设置有显示屏622;通过设置有控制机构,通过控制按钮621设置装置的运行参数,显示屏622显示装置的运行数据,提高了装置的自动化程度和可视化程度。
28.工作原理:使用时,通过控制按钮621设置装置的运行参数,显示屏622显示装置的运行数据,将贴纸卷固定在一个安装轴551上,贴纸的一端绕过一对导向滚轴531固定在另一个安装轴551上,启动收卷马达550,收卷马达550带动安装轴551转动,安装轴551对贴合
后的贴纸卷进行收集,将塑胶瓶盖放置在一个输送带340上,输送马达320启动,输送马达320带动滚轴330转动,滚轴330通过输送带340对塑胶瓶盖进行输送,电动伸缩杆a430启动,电动伸缩杆a430带动吸盘431移动,吸盘431将塑胶瓶盖吸附,搬运电机410启动,搬运电机410带动旋转底座411转动,旋转底座411转动带动搬运支架420转动,搬运支架420转动将塑胶瓶盖搬运至放置槽221内部,伺服电机210启动,伺服电机210带动旋转盘220转动,旋转盘220对塑胶瓶盖进行运输,当塑胶瓶盖运输至贴标机构位置后,液压杆520通过液压带动移动座530移动,移动座530通过一对导向滚轴531将贴纸贴紧塑胶瓶盖,电动伸缩杆b560启动,电动伸缩杆b560带动压块561移动,压块561将贴纸贴合在塑胶瓶盖上,贴标完成的塑胶瓶盖被旋转盘220运输至另一个搬运机构位置,并通过吸盘431将塑胶瓶盖搬运至另一个输送带340上,完成对塑胶瓶盖的自动化贴标操作。
29.本实用新型虽公开了实施例和附图,但是本领域的技术人员可以理解:在不脱离本实用新型及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本实用新型的范围不局限于实施例和附图所公开的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。