1.本发明涉及激光加工技术领域,尤其是一种轮胎内衬激光加工设备。
背景技术:
2.激光加工是利用光的能量经过透镜聚焦后在焦点上达到很高的能量密度,靠光热效应来加工, 激光加工由于不需要工具、加工速度快、表面变形小,可加工各种材料,其中就包括轮胎内衬的加工。市面上的轮胎内衬激光加工设备,主要采用两种方式,一种是激光头固定、轮胎转动加工方式,这种方式由于光纤的限制,只能转动有限的圈数,对一些高度较高的轮胎,不能单次完成加工,影响效率;另一种是激光头转动、轮胎固定加工方式,这种方式由于市面上多为单振镜激光头,只能出单一线激光对轮胎进行加工,不能有效加工轮胎内壁纹理的阴影面,加工效果不好。
技术实现要素:
3.本发明的目的在于提供一种轮胎内衬激光加工设备,旨在解决现有技术中轮胎内衬加工效率低、加工效果不好的问题。
4.本发明是这样实现的,一种轮胎内衬激光加工设备,包括机架;轮胎旋转装置,轮胎旋转装置用于实现轮胎在水平方向上的旋转;轮胎夹持机构,轮胎夹持机构用于在第一方向及与第一方向垂直的第二方向上夹紧轮胎;激光头升降装置,激光头升降装置用于调整激光头在竖直方向上的位置,激光头升降装置与机架连接;激光头旋转装置,激光头旋转装置用于实现激光头在俯仰角度上的旋转。
5.优选的,激光头旋转装置包括激光头旋转运动机构,激光头旋转运动机构包括伺服电机,伺服电机的输出轴与主动轮连接,主动轮通过同步带与从动轮带连接;激光头旋转运动机构还包括转轴,转轴与从动轮转动连接。
6.优选的,激光头旋转装置包括壳体,壳体包括上壳体、下壳体、侧壳体,上壳体的顶板与激光头升降装置连接,下壳体内部连接有激光头,转轴连接下壳体,转轴转动带动激光头转动。
7.优选的,轮胎夹持装置包括第一直线模组,第一直线模组包括反向丝杆,反向丝杆用于控制轮胎在第二方向上的运动;轮胎夹持装置还包括夹持机构,夹持机构包括竖直连接板与水平连接板,水平连接板上连接有惰轮组,惰轮组包括多个惰轮,惰轮组分别位于水平连接板的两端,惰轮通过水平连接板与竖直连接板连接,竖直连接板有两个,且两个竖直连接板分别螺纹连接于反向丝杆的两个相反螺纹处。
8.优选的,激光头升降装置包括第二直线模组、第三直线模组、连接支架和安装板,第三直线模组有两个,两个第三直线模组在第一方向上分别连接于连接支架两端,第二直线模组用于控制激光头升降装置在第二方向上的运动,第三直线模组用于控制激光头升降装置在竖直方向上的运动,安装板安装在连接支架上,激光头升降装置通过安装板与机架连接。
横架、53-第一直线模组、531-第一直线电机、532-反向丝杆、533-第一滑块、534-第一滑轨、535-第三光耦挡片、536-第三光耦、54-惰轮、541-竖直连接板、542-水平连接板、55-滚珠、56-光电开关;6-激光头升降装置、61-第二直线模组、611-第二直线电机、612-竖直安装板、613-第二滑轨、614-第二滑块、615-第四光耦、616-第四光耦挡片、617-第一初始位光耦、62-第三直线模组、621-第三直线电机、622-水平安装板、623-第三滑轨、624-第三滑块、625-第二初始位光耦、626-第五光耦挡片、627-第五光耦、63-连接支架、64-安装板、65-运动块;7-激光头旋转装置、71-壳体、711-上壳体、712-下壳体、713-侧壳体、72-激光头旋转运动机构、721-伺服电机、722-主动轮、723-同步带、724-从动轮、725-转轴、73-抽屉式镜片座、74-机械式限位开关、75-激光头;8-吸尘结构、81-吸尘口、82-风筒;9-轮胎输送装置、91-直流减速电机、92-第一链轮、93-第二链轮、94-链轮组、95-长滚筒、96-短滚筒、97-固定支架、98-旋转限位开关、99-滚筒安装板、991-缺口;10-悬臂;11-操作面板;12-可视化防护玻璃;131-显示灯、132-蜂鸣器。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
19.以下结合具体实施例对本发明的实现进行详细的描述。
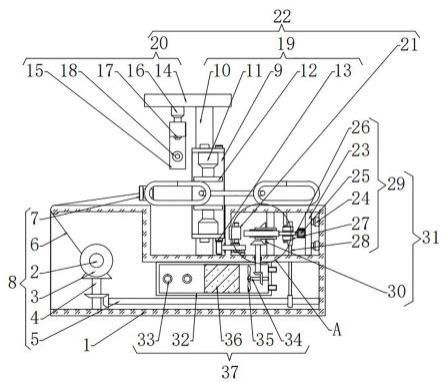
20.参照图1所示,为本发明提供较佳实施例。一种轮胎内衬激光加工设备,包括:机架111;轮胎升降装置3,用于实现轮胎在竖直方向上的移动;轮胎旋转装置4,用于实现轮胎在水平方向上的旋转;轮胎夹持机构5,用于在第一方向及与第一方向垂直的第二方向上夹紧轮胎;激光头升降装置6,用于调整激光头在竖直方向上的位置,便于充分地加工轮胎内衬;激光头旋转装置7,使得激光头可以实现俯仰角度的旋转,更好地加工工件表面的阴影面及四角区域,加工效果更好。激光头升降装置6与机架111连接且与激光头旋转装置7相连。通过设置机架111、轮胎升降装置3、轮胎旋转装置4、激光头升降装置6及激光头旋转装置7可实现对加工过程中激光头升降以及在俯仰角度的旋转,弥补现有技术中只能单一角度加工轮胎的缺陷,实现更好的加工效果。
21.参照图1、图2所示,本实施例中,轮胎升降装置3包括2个顶升气缸31,顶升气缸31与机架111连接,且顶升气缸31的活塞杆与第二气缸支架32连接,第二气缸支架32与支撑板33连接,顶升气缸31驱动第二气缸支架32及支撑板33在竖直方向上的升降,为了提高在竖直方向上的运动平行度,轮胎升降装置3还设置导向柱35,导向柱35与支撑板33活动连接。为了保证两个顶升气缸31、第二气缸支架32以及支撑板33的平行度,轮胎升降装置3还包括同步升降器34,保证升降的稳定性及平行度,同步升降器34外周围还套设有风琴罩36,风琴
罩36设置于同步升降器34与支撑板33之间,具体的,风琴罩36设置于同步升降器34包含的联动器341与支撑板33之间,用于缓冲支撑板33在竖直方向上的运动。轮胎升降装置3还包括第一底板37,第一底板37通过支撑块38与机架111固定连接,第一底板37上开设有过孔371,用于通过轮胎旋转装置4,避免在升降过程中与轮胎旋转装置4干涉。
22.参照图1、图2、图3所示,本实施例中,轮胎旋转装置4包括旋转电机41以及中空旋转平台42,旋转电机41采用伺服电机,利用中空旋转平台42负载大、同心度高的优点,增加旋转的稳定性,保证轮胎的加工效果。旋转电机41与中空旋转平台42传动连接,用于控制中空旋转平台42 的转动,中空旋转平台42与支撑架33连接,具体地,中空旋转平台42包括基座421,基座421与支撑架架33连接,这样设置可将旋转电机41与中空旋转平台42一并固定在支撑架33上。轮胎旋转装置4还包括旋转盘45,旋转盘45与中空旋转平台42连接,具体地,中空旋转平台42包括旋转轴422,旋转盘45与旋转轴422连接,且旋转盘45与轮胎夹持机构5固定连接,这样设置使得中空旋转平台42旋转的同时带动轮胎夹持机构5旋转,最终实现轮胎的旋转。旋转轴422设置在基座421内。另外,轮胎旋转装置4还包括第一光耦挡片44、第一光耦43,第一光耦43设置在基座421上,第一光耦挡片44设置在旋转轴422外表面上,第一光耦43用于检测第一光耦挡片44的位置,以确定旋转轴422是否运动至设定位置,轮胎旋转装置4还包括第二光耦挡片46、第二光耦47,第二光耦47与支撑架33通过支架471连接,第二光耦挡片46与旋转盘45连接,第二光耦46用于检测第二光耦挡片45的位置,以确定旋转盘45是否运动至设定位置。
23.参照图1、图2、图3、图4、图5所示,本实施例中,轮胎夹持装置5包括支撑座51,支撑座51与旋转盘45连接。支撑座51包括第二底板511、侧板512、顶板513,侧板512上开有滑槽514,顶板513上均匀阵列有滚珠55,便于轮胎在第二方向上移动过程中的摩擦。支撑座51上方连接有横架52,横架52设置在支撑座51在第一方向上的两侧,用于支撑轮胎,且横架52上均匀阵列有滚珠55,便于轮胎在第一方向上移动过程中的摩擦,其中,第一方向与第二方向在水平面上相互垂直。轮胎夹持装置5还包括第一直线模组53,用于控制轮胎在第二方向上的运动,包括第一直线电机531、反向丝杆532、第一滑块533、第一滑轨534, 第一直线电机531连接在支撑座51上,控制反向丝杆532转动,第一滑块533与第一滑轨534滑动连接,第一滑轨534固定连接在第二底板511上。夹持机构包括惰轮54、竖直连接板541、水平连接板542,水平连接板542上连接有惰轮组,惰轮组包括多个惰轮54,优选的,惰轮54为2个,且分别位于水平连接板542的两端,水平连接板542有两个,惰轮54通过水平连接板542与竖直连接板541连接,竖直连接板541与第一滑块533连接,优选的,竖直连接板541有两个,且2个竖直连接板541分别螺纹连接于反向丝杆532的两个相反螺纹处,反向丝杆532转动带动两个竖直连接板541在第二方向上往相反方向运动,进而驱动两个水平连接板542上的惰轮54往逐渐靠近的方向运动或者往逐渐远离的方向运动,最终夹持住轮胎。第一直线模组53还包括第三光耦挡片535、第三光耦536,第三光耦挡片535与其中一个竖直连接板541上,第三光耦536设置在顶板513上且与第三光耦挡片535位于同一侧,第三光耦536用于检测第三光耦挡片535的位置,以确定惰轮54是否回到初始位。第一直线模组53与惰轮54的配合利用了四点定圆的原理,可对不同尺寸的轮胎进行夹持,其中,当两个竖直连接板541分别运动至反向丝杆532的两段相反旋向的螺纹距离最近的位置时,此时两组惰轮组相互靠近的表面为最小可夹持轮胎的外圆表面;当两个竖直连接板541分别运动至反向丝杆532的两段相反旋
向的螺纹距离最远的位置时,此时两组惰轮组相互远离的表面为最大可夹持轮胎的内圆表面。这样设置可适应不同尺寸的轮胎,使用范围广。另外,第一直线模组53还设置有多组光电开关56,多组光电开关56分别设置在支撑座51在第二方向上的两侧,当轮胎运动到支撑座51上时,两侧的光电开关56同时检测到轮胎,这时才会判定轮胎到达定中区域,开始进行轮胎的夹持,可减少信号的误触发。
24.参照图1、图6所示,本实施例中,还包括激光头升降装置6,激光头升降装置6包括第二直线模组61、第三直线模组62、连接支架63和安装板64,安装板64安装在连接支架63上,激光头升降装置6通过安装板64与机架111连接,具体地,机架111包括顶盖112,安装板64与顶盖112连接。
25.具体地,第二直线模组61用于控制激光头升降装置6在第二方向上的运动,用于适应不同直径的轮胎,使得激光头发射的激光到轮胎内壁的距离永远为焦距的长度,提高加工效果。第二直线模组61包括第二直线电机611、竖直安装板612,竖直安装板612固定连接在连接支架63上,第二直线电机611与竖直安装板612连接,竖直安装板612上连接有第二滑轨613,第二滑轨613与第二滑块614滑动连接。进一步地,第二直线模组61还包括第四光耦615和第四光耦挡片616,第四光耦615固定设置在竖直安装板612的底端,第四光耦挡片616连接在第二滑块614上,第四光耦615用于检测第四光耦挡片616的位置,判断第二滑块614是否到达工作位置。可选的,竖直安装板上612还设置有第一初始位光耦617,用于判断第二滑块614是否回到初始位置。另外,激光头升降装置6还包括运动块65,运动块65安装在第二滑块614上,用于带动激光头旋转装置7在竖直方向上的运动。
26.具体地,第三直线模组62用于控制激光头升降装置6在竖直方向上的运动,适应不同高度的轮胎,适用场景更多。优选的,第三直线模组62有2个。第三直线模组62包括第三直线电机621、水平安装板622,水平安装板622上设有第三滑轨623,第三滑轨623与第三滑块624滑动连接,第三滑块624与连接支架63连接。优选的,水平安装板622、第三滑轨623均有两个,分别位于竖直安装板612在第一方向上的两侧,连接支架63分别连接两个第三滑块623,这样既可以更好地支撑起第二直线模组62,又可以只用一个第三直线电机621实现第三直线模组63在第二方向上地移动,结构更加简单。另外,第三直线模组62还包括第二初始位光耦625、第五光耦挡片626、第五光耦627,第五光耦627与第二初始位光耦625分别设置在水平安装板622的两端且均用于检测第五光耦挡片626的位置,第五光耦挡片626设置在第三滑块624上,第五光耦627用于检测第五光耦挡片626是否到达工作位置,第二初始位光耦625用于检测第五光耦挡片626是否到达初始位置。
27.参照图1、图6、图7、图8所示本实施例中,激光头旋转装置7包括壳体71,壳体71包括上壳体711、下壳体712、侧壳体713,上壳体711的顶板与运动块65连接,侧壳体713安装于下壳体712上。激光头旋转装置7还包括激光头旋转运动机构72,包括伺服电机721,伺服电机721的输出轴与主动轮722连接,主动轮722通过同步带723与从动轮724带连接,激光头旋转运动机构72还包括转轴725,转轴725与从动轮724连接,优选为键连接,使得从动轮724转动带动转轴725转动,同时转轴725连接下壳体712,下壳体712内部连接有激光头75,故伺服电机721驱动主动轮722顺时针或者逆时针转动一定角度,带动从动轮724相应转动,进而带动连接在一起的转轴725以及下壳体712转动,最终使得激光头75围绕转轴725顺时针或者逆时针转动一定角度,即实现俯仰角度的旋转,可更好地加工工件表面地阴影面及死角区
域,提高加工效果。
28.在另一实施例中,激光头旋转装置7还包括抽屉式镜片座73,方便镜片的更换与检修,极大减少了设备的维护与检修时间。另外,激光头旋转装置7还包括机械式限位开关74,防止设备故障时激光头直接撞在顶板513上。
29.参照图1所示,可选地,该设备还包括吸尘结构8,具体为吸尘口81与风筒82,吸尘机构用于吸走加工轮胎气密层时产生地污染颗粒及气雾,减少对镜片的污染,也减少了设备内部的粉尘量。吸尘口81放置在激光头旋转装置7旁,风筒82连接到设备外部。其中,风筒82与运动块65连接,伴随激光头旋转装置7在竖直方向上移动。
30.参照图1、图9、图10所示,可选地,该设备还包括轮胎输送装置9,用于输送待加工的轮胎。具体地,轮胎输送装置9采用链传动,包括直流减速电机91、第一链轮92、第二链轮93以及链轮组94,直流减速电机91驱动第一链轮92转动,利用链条带动第二链轮93转动,第二链轮93与链轮组94之间通过链条传动。轮胎输送装置9还包括长滚筒95、短滚筒96,长滚筒95两端连接有链轮组94,且通过滚筒安装板99安装在机架上。短滚筒96一端连接滚筒安装板99,另一端连接固定支架97,固定支架97设置有容纳横架52的容纳空间,当轮胎输送时,轮胎升降装置3下降至该容纳空间内,以免干涉轮胎输送。另外,滚筒安装板99上还设置有缺口991,用于容纳第一直线模组53,避免干涉,缺口991内侧分别安装有旋转限位开关98,避免轮胎升降装置3在下降过程中误触发旋转,减少错误率。
31.参照图1、图11所示,可选地,该设备还包括侧门升降装置2,便于自动传输轮胎。侧门升降装置2包括侧门21、升降门22、升降气缸23,升降气缸23利用第一气缸支架24安装于侧门21上,具体为安装在侧门21固定连接的安装条211上。侧门21还包括导轨212,升降气缸23驱动升降门22沿着导轨212在竖直方向上移动,实现侧门21的打开与关闭。
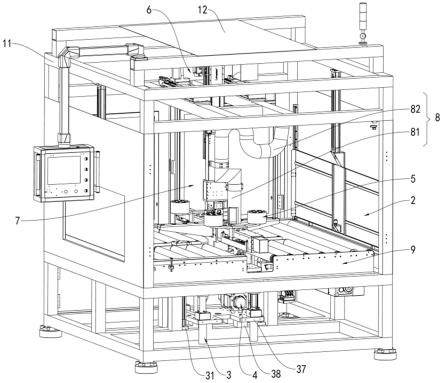
32.参照图1、图12所示1可选地,该设备还包括外壳1、悬臂10、操作面板11、显示灯131、蜂鸣器132,外壳1上设置有可视化防护玻璃12,方便操作人员观察设备内部加工工况,且可有效过滤加工波段的激光,保护操作人员;悬臂10安装在壳体上,且与操作面板11相连,设备中央控制系统统一集成到操作面板11上,操作人员可直接通过在操作面板11操作来控制整个设备的运行,集成度高,且与悬臂10相连接,可在以悬臂10与外壳1连接的连接臂臂长为半径的圆形区域内操作,可活动空间大,可适应不同的现场情况;外壳1还设置有报警装置,报警装置包括显示灯131及蜂鸣器132,用于提示操作人员设备异常,其中,显示灯131为三色灯,比单一颜色灯显示效果更好。
33.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。