1.本实用新型属于焊接技术领域,具体地涉及一种自控激光焊接装置。
背景技术:
2.焊接技术,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,金属焊接过程中,工件和焊料熔化形成熔融区域,熔池冷却凝固后便形成材料之间的连接。
3.目前,焊接技术提高效率的途径有二:第一提高焊接熔敷率;第二则是减少坡口断面及金属熔敷,最突出的成就就是窄间隙焊接。电子束焊,等离子焊,激光焊采用间窄隙焊接法,可以获得好的焊缝成形和质量,且焊接变形量小,焊接效率明显提升。在激光焊接和电子束焊接被开发出来后,研究人员仍一方面深入研究、开发新的焊接方法,另一方面要提高焊接机械化和自动化水平,特别是可以普遍性适用的焊接技术,进一步提高焊接质量和焊接效率,同时需要提高焊接质量稳定性,解决恶劣劳动条件。
技术实现要素:
4.本实用新型的目的在于解决现有金属焊接技术应用普遍存在工作效率较低,焊接质量稳定性差,且工作恶劣劳动条件的问题,提供一种自控激光焊接装置,通过总控系统集成智能化控制操作,实现多轴联动床体系统转动进行自动激光焊接,自动吹扫现场,压缩空气对工件的降温,焊接质量和焊接效率明显提高,同时提高焊接质量稳定性。
5.为解决上述技术问题,本实用新型采用的技术方案是:一种自控激光焊接装置,包括底座,其特征在于:还包括激光发生器、焊接装置、多轴联动床体系统、总控系统集成;
6.其中,所述多轴联动床体系统包括x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台;
7.所述底座上设置基座,所述基座上设置x同步轴传动平台,所述x同步轴传动平台垂直设置y轴传动平台并可沿x同步轴方向前后移动,所述y轴传动平台垂直纵向设置z轴传动平台并可上下升降;
8.所述底座上设置360
°
绕轴联动工作台,所述z轴传动平台上设置焊接装置,所述y轴传动平台上设置送丝机构,所述360
°
绕轴联动工作台与焊接装置连接;
9.所述总控系统集成包括稳压器、电控柜、中央电控柜、热能交换器、气控柜、操作平台。
10.作为优选,所述焊接装置上设置焊接机器人。
11.作为优选,所述焊接装置分别接入气控柜、热能交换器、激光发生器。
12.作为优选,所述稳压器分别接入激光发生器和焊接机器人。
13.作为优选,所述操作平台分别接入x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台、中央电控柜、气控柜、焊接机构、送丝机构。
14.本实用新型的有益效果是:
15.1、本实用新型一种自控激光焊接装置由于采用多轴联动床体系统,焊接机器人可以由x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台操作进行xyz、360
°
多方位调整角度焊接, x同步轴传动平台带着焊接机器人平行移动,y轴传动平台沿x同步轴方向水平前后移动,z轴传动平台并可上下升降,360
°
绕轴联动工作台可以带动焊接机器人进行多角度转动,满足复杂空间曲线的焊接要求满足。
16.2、本实用新型一种自控激光焊接装置由于x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台采用卧式回转变位机可使工件绕水平轴线进行旋转,尾架可移动,适应不同的工件长度,可广泛适用于焊接金属工件,焊接机器人自控焊接,同时焊接装置接入热能交换器,气控柜,自动吹扫现场,压缩空气对工件的降温,工作效率高,工作工况条件改良。
17.3、本实用新型一种自控激光焊接装置由于采用总控系统集成智能控制,操作平台分别接入x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台,中央电控柜、气控柜、焊接机构、送丝机构分别接入操作平台,电控柜接入中央电控柜,操作平台通过编程及现场传感器回路加补偿,模拟焊接后,再进行实际焊接,实现整个系统的集成控制,具备急停功能,任意急停按钮都可停止整个系统动作。
18.4、本实用新型一种自控激光焊接装置由于采用稳压器分别接入激光发生器和焊接机器人,通过稳压电源可满足对激光器及机器人的供电要求,保证焊接质量的稳定性。
附图说明
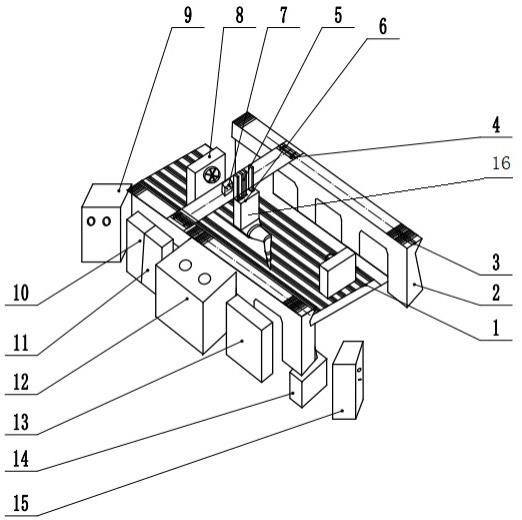
19.图1是本实用新型一种自控激光焊接装置结构示意图。
20.1-底座,2-基座,3-x同步轴传动平台,4-y轴传动平台,5-z轴传动平台,6-焊接机器人,7-送丝机构,8-360
°
绕轴联动工作台,9-稳压器,10-电控柜,11-中央电控柜,12-激光发生器,13-热能交换器,14-气控柜,15-操作平台,16-焊接装置。
具体实施方式
21.为了更好的理解,下面结合具体实施例对本实用新型进行进一步的描述。
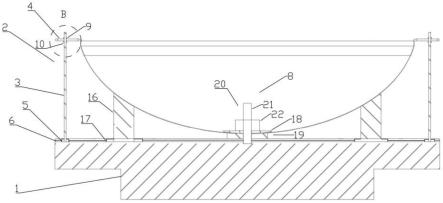
22.参见图1,本实用新型提供一种自控激光焊接装置16。装置包括激光发生器12、焊接装置16、多轴联动床体系统、总控系统集成三个部装。
23.装置有底座1,底座1上安装多轴联动床体系统,多轴联动床体系统由x同步轴传动平台3、y轴传动平台4、z轴传动平台5、360
°
绕轴联动工作台8构成。
24.底座1上安装两条平行基座2,基座2上分别安装x同步轴传动平台3,x同步轴传动平台3上垂直安装y轴传动平台4,y轴传动平台4可沿x同步轴传动平台3前后移动,y轴传动平台4上安装送丝机构7。
25.y轴传动平台4垂直纵向安装z轴传动平台5,z轴传动平台5可沿y轴传动平台4上下升降,z轴传动平台5上安装焊接装置16,焊接装置16上安装焊接机器人6,焊接机器人6主要有焊接枪。
26.底座1上安装360
°
绕轴联动工作台8,360
°
绕轴联动工作台8与焊接装置16连接,焊接装置16分别接入气控柜14、热能交换器13、激光发生器12,稳压器9分别接入激光发生器12和焊接机器人6,激光发生器12和焊接机器人6需要稳压电源供电要求。
27.总控系统集成由稳压器9、电控柜10、中央电控柜11、热能交换器13、气控柜14、操作平台15等构成,电控柜10接入中央电控柜11,操作平台15分别接入x同步轴传动平台3、y轴传动平台4、z轴传动平台5、360
°
绕轴联动工作台8、中央电控柜11、气控柜14、焊接机构、送丝机构7,操作平台15内存编程软件,得到控制指令,分别操控多轴联动床体系统、激光发生器12,实现对焊接装置16工作,操作平台15智能控制整个系统动作。
28.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
技术特征:
1.一种自控激光焊接装置,包括底座,其特征在于:还包括激光发生器、焊接装置、多轴联动床体系统、总控系统集成;其中,所述多轴联动床体系统包括x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台;所述底座上设置基座,所述基座上设置x同步轴传动平台,所述x同步轴传动平台垂直设置y轴传动平台并可沿x同步轴方向前后移动,所述y轴传动平台垂直纵向设置z轴传动平台并可上下升降;所述底座上设置360
°
绕轴联动工作台,所述z轴传动平台上设置焊接装置,所述y轴传动平台上设置送丝机构,所述360
°
绕轴联动工作台与焊接装置连接;所述总控系统集成包括稳压器、中央电控柜、热能交换器、气控柜、操作平台。2.根据权利要求1所述的一种自控激光焊接装置,其特征在于:所述焊接装置上设置焊接机器人。3.根据权利要求1所述的一种自控激光焊接装置,其特征在于:所述焊接装置分别接入气控柜、热能交换器、激光发生器。4.根据权利要求1所述的一种自控激光焊接装置,其特征在于:所述稳压器分别接入激光发生器和焊接机器人。5.根据权利要求1所述的一种自控激光焊接装置,其特征在于:所述操作平台分别接入x同步轴传动平台、y轴传动平台、z轴传动平台、360
°
绕轴联动工作台、中央电控柜、气控柜、焊接机构、送丝机构。
技术总结
本实用新型公开了一种自控激光焊接装置,包括底座,其特征在于:还包括激光发生器、焊接装置、多轴联动床体系统、总控系统集成;多轴联动床体系统包括X同步轴传动平台、Y轴传动平台、Z轴传动平台、360
技术研发人员:姚讲会 桂春来 何俊
受保护的技术使用者:湖北双航机电装备科技有限公司
技术研发日:2021.12.16
技术公布日:2022/10/27
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。