1.本发明涉及作业车辆以及用于控制作业车辆的方法。
背景技术:
2.在作业车辆中,有的具备包含液压泵与液压马达的静液压式变速装置。在静液压式变速装置中,通过发动机驱动液压泵,通过从液压泵排出的工作油驱动液压马达。液压马达驱动行驶装置。由此,作业车辆行驶。而且,通过根据车速控制液压泵的容量与液压马达的容量,从而根据车速无级地变更静液压式变速装置的变速比。
3.以往,在具备静液压式变速装置的作业车辆中,提出了用于防止发动机的过度旋转的技术。例如在专利文献1中,检测作业车辆的下坡时的速度的增加量。而且,变更液压泵的容量以降低车速。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平6-191317号公报
技术实现要素:
7.发明将要解决的课题
8.上述的技术的目的在于保护发动机。但是,即使在发动机到达过度旋转之前,由于下坡时的速度的增大,液压马达的旋转速度也会增大。在该情况下,液压马达的流量有时超过允许值。另外,在实际上速度增大之后,为了保护液压马达而减少车速的情况下,需要急减速。在该情况下,作业车辆的操作性将会降低。本公开的课题在于,在具备静液压式变速装置的作业车辆中,防止由于下坡时的速度的增大而导致液压马达的流量过度地增大,并且抑制操作性的降低。
9.用于解决课题的手段
10.本公开的一方式的作业车辆具备发动机、静液压式变速装置、行驶装置、倾斜传感器以及控制器。静液压式变速装置包含液压泵、液压回路以及液压马达。液压泵由发动机驱动。液压回路连接于液压泵。液压马达经由液压回路连接于液压泵。行驶装置由液压马达驱动。倾斜传感器检测车辆的倾斜角度。控制器控制液压泵的容量与液压马达的容量。
11.控制器决定指令车速。控制器取得倾斜角度。控制器在倾斜角度比第一阈值小时,基于第一泵数据根据指令车速决定液压泵的容量,基于第一马达数据根据指令车速决定液压马达的容量。第一泵数据规定指令车速与液压泵的容量的关系。第一马达数据规定指令车速与液压马达的容量的关系。控制器在倾斜角度为第一阈值以上时,基于第二泵数据根据指令车速决定液压泵的容量,基于第二马达数据根据指令车速决定液压马达的容量。第二泵数据相对于指令车速规定比第一泵数据小的液压泵的容量。第二马达数据相对于指令车速规定比第一马达数据小的液压马达的容量。
12.本公开的其他方式的方法是作业车辆的控制方法。作业车辆具备静液压式变速装
置。静液压式变速装置包含液压泵、液压回路以及液压马达。液压泵由发动机驱动。液压回路连接于液压泵。液压马达经由液压回路连接于液压泵。本方式的方法具备以下的处理。
13.第一处理是决定指令车速。第二处理是取得作业车辆的倾斜角度。第三处理是,在倾斜角度比第一阈值小时,基于第一泵数据根据指令车速决定液压泵的容量,基于第一马达数据根据指令车速决定液压马达的容量。第一泵数据规定指令车速与液压泵的容量的关系。第一马达数据规定指令车速与液压马达的容量的关系。第四处理是,在倾斜角度为第一阈值以上时,基于第二泵数据根据指令车速决定液压泵的容量,基于第二马达数据根据指令车速决定液压马达的容量。第二泵数据相对于指令车速规定比第一泵数据小的液压泵的容量。第二马达数据相对于指令车速规定比第一马达数据小的液压马达的容量。
14.发明效果
15.根据本公开,在倾斜角度为第一阈值以上时,基于第二泵数据,根据指令车速决定液压泵的容量,基于第二马达数据根据指令车速决定液压马达的容量。第二泵数据相对于指令车速规定比第一泵数据小的液压泵的容量。因此,在倾斜角度为第一阈值以上时,相比于倾斜角度比第一阈值小时,液压泵的容量减少。另外,第二马达数据相对于指令车速规定比第一马达数据小的液压马达的容量。因此,在倾斜角度为第一阈值以上时,相比于倾斜角度比第一阈值小时,液压马达的容量减少。由此,可防止因下坡时的速度的增大而导致液压马达的流量过度地增大。另外,液压泵的容量与液压马达的容量的减少由倾斜角度判定。因此,在下坡时,在较早的定时,液压泵的容量与液压马达的容量减少。由此,可抑制操作性的降低。
附图说明
16.图1是实施方式的作业车辆的立体图。
17.图2是表示作业车辆的驱动系统与控制系统的概略的图。
18.图3是表示通过控制器执行的处理的图。
19.图4是表示泵数据与马达数据的一个例子的图。
20.图5是表示限制速度数据的一个例子的图。
具体实施方式
21.以下,参照附图,对本公开的一实施方式进行说明。图1是实施方式的作业车辆1的立体图。在本实施方式中,作业车辆1是推土机。作业车辆1具备车身11、行驶装置12a、12b以及工作装置13。
22.车身11具有驾驶室14与发动机室15。在驾驶室14配置有未图示的驾驶座。发动机室15配置于驾驶室14的前方。行驶装置12a、12b安装于车身11的下部。行驶装置12a、12b包含第一行驶装置12a与第二行驶装置12b。第一行驶装置12a与第二行驶装置12b左右排列地配置。第一行驶装置12a包含第一履带16a。第二行驶装置12b包含第二履带16b。履带16a、16b旋转,使得作业车辆1行驶。
23.工作装置13安装于车身11。工作装置13具有提升框架17、推土铲18以及提升缸19。提升框架17以能够上下动作的方式安装于车身11。提升框架17支承推土铲18。推土铲18配置于车身11的前方。推土铲18伴随着提升框架17的上下动上下动作。提升缸19连结于车身
11与提升框架17。提升缸19伸缩,使得提升框架17上下动作。
24.图2是表示作业车辆1的驱动系统与控制系统的概略的图。如图2所示,作业车辆1包含发动机20与静液压式变速装置(以下,称作“hst”)21。hst21包含第一液压泵22、第一液压马达23、第一液压回路24、第二液压泵25、第二液压马达26以及第二液压回路27。发动机20的输出轴连接于第一液压泵22与第二液压泵25。第一液压泵22与第二液压泵25由发动机20驱动,从而排出工作油。
25.第一液压泵22与第二液压泵25是可变容量泵。第一液压泵22连接于第一泵控制装置28。第一泵控制装置28变更第一液压泵22的斜板角22a,从而变更第一液压泵22的容量。第二液压泵25连接于第二泵控制装置29。第二泵控制装置29通过变更第二液压泵25的斜板角25a而变更第二液压泵25的容量。第一泵控制装置28与第二泵控制装置29例如分别含有控制阀与液压缸。控制阀可以是电磁阀。或者,控制阀也可以是液压先导式的控制阀。
26.第一液压回路24连接于第一液压泵22。第一液压马达23经由第一液压回路24连接于第一液压泵22。从第一液压泵22排出的工作油经由第一液压回路24供给到第一液压马达23。由此,第一液压马达23被驱动。从第一液压马达23排出的工作油经由第一液压回路24回收到第一液压泵22。
27.第二液压回路27连接于第二液压泵25。第二液压马达26经由第二液压回路27连接于第二液压泵25。从第二液压泵25排出的工作油经由第二液压回路27向第二液压马达26供给。由此,第二液压马达26被驱动。从第二液压马达26排出的工作油经由第二液压回路27回收到第二液压泵25。
28.第一液压马达23连接于第一行驶装置12a。第一行驶装置12a包含第一终端减速器31a与第一链轮32a。第一链轮32a经由第一终端减速器31a连接于第一液压马达23的输出轴。上述的第一履带16a卷绕于第一链轮32a。第一液压马达23的旋转经由第一终端减速器31a与第一链轮32a传递到第一履带16a。由此,第一履带16a被驱动。
29.第二液压马达26连接于第二行驶装置12b。第二行驶装置12b包含第二终端减速器31b与第二链轮32b。第二链轮32b经由第二终端减速器31b连接于第二液压马达26的输出轴。上述的第二履带16b卷绕于第二链轮32b。第二液压马达26的旋转经由第二终端减速器31b与第二链轮32b传递到第二履带16b。由此,第二履带16b被驱动。
30.第一液压马达23与第二液压马达26是可变容量马达。第一液压马达23连接于第一马达控制装置33。第一马达控制装置33通过变更第一液压马达23的斜板角23a而变更第一液压马达23的容量。第二液压马达26连接于第二马达控制装置34。第二马达控制装置34通过变更第二液压马达26的斜板角26a而变更第二液压马达26的容量。第一马达控制装置33与第二马达控制装置34例如分别含有控制阀与液压缸。控制阀可以是电磁阀。或者,控制阀也可以是液压先导式的控制阀。
31.作业车辆1包含发动机控制器35与发动机设定部件36。发动机控制器35控制发动机20的旋转速度。发动机设定部件36能够由作业车辆1的操作人员操作。发动机设定部件36例如是转盘式的开关。但是,发动机设定部件36也可以是杆、或者踏板等其他部件。发动机设定部件36输出表示发动机20的目标旋转速度的操作信号。
32.发动机控制器35包含cpu等处理器与ram以及rom等存储器。发动机控制器35从发动机设定部件36接收操作信号。发动机控制器35控制发动机20,以使发动机旋转速度成为
目标旋转速度。
33.作业车辆1包含fr操作部件37、换档操作部件38、倾斜传感器39以及控制器40。fr操作部件37与换档操作部件38能够由操作人员操作。fr操作部件37例如是杆。但是,fr操作部件37也可以是开关等其他部件。fr操作部件37为了切换作作业车辆1的前进与后退而被操作。fr操作部件37输出表示作业车辆1的行驶方向的fr信号。
34.换档操作部件38例如是开关。但是,换档操作部件38也可以是杆等其他部件。换档操作部件38为了设定作业车辆1的速度范围而被操作。换档操作部件38输出表示从多个速度范围选择的速度范围的换档信号。例如换档操作部件38能够从三个速度范围选择速度范围。但是,速度范围的数量可以比三个少,或者也可以比三个多。
35.倾斜传感器39检测作业车辆1的倾斜角度。作业车辆1的倾斜角度示出作业车辆1的俯仰角。即,作业车辆1的倾斜角度是作业车辆1的前后方向相对于水平面的角度。倾斜传感器39输出表示作业车辆1的倾斜角度的倾斜角度信号。在本实施方式中,倾斜传感器39是imu(inertial measurement unit,惯性测量单元)。另外,在本实施方式中,作业车辆1的倾斜角度的意思是下坡时的倾斜角度。因而,作业车辆1的倾斜角度表示比水平方向朝下的角度。
36.控制器40包含cpu等处理器与ram以及rom等存储器。控制器40从fr操作部件37接收fr信号。控制器40从换档操作部件38接收换档信号。控制器40从倾斜传感器39接收倾斜角度信号。控制器40基于fr信号、换档信号以及倾斜角度信号,控制第一、第二液压泵22、25与第一、第二液压马达23、26。
37.以下,说明控制器40对第一、第二液压泵22、25与第一、第二液压马达23、26的控制。在以下的说明中,为了容易理解,对作业车辆1向前方或者后方直行的情况进行说明。图3是表示由控制器40执行的处理的图。如图3所示,在步骤s101中,控制器40根据换档信号决定设定车速。控制器40存储有规定各速度范围与设定车速的关系的设定车速数据。设定车速数据规定了各速度范围与设定车速的关系,使得设定车速随着高速的速度范围而变高。控制器40参照设定车速数据,决定与换档信号所示的速度范围相应的设定车速。
38.在步骤s102中,控制器40根据倾斜角度信号决定限制速度。控制器40存储有规定作业车辆1的倾斜角度与限制速度的关系的限制速度数据。控制器40参照限制速度数据,决定与倾斜角度信号所示的倾斜角度相应的限制速度。关于限制速度数据,之后进行叙述。
39.在步骤s103中,控制器40决定指令车速。控制器40将设定车速与限制速度中较小的一方决定为指令车速。即,控制器40以使指令车速不超过限制速度的方式决定指令车速。
40.在步骤s104中,控制器40根据指令车速与倾斜角度决定液压泵的容量(以下,称作“泵容量”)。在步骤s105中,控制器40根据指令车速与倾斜角度决定液压马达的容量(以下,称作“马达容量”)。以下,对用于决定泵容量与马达容量的处理进行说明。另外,这里,假设第一液压泵22的容量与第二液压泵25的容量相同。另外,假设第一液压马达23的容量与第二液压马达26的容量相同。
41.控制器40根据作业车辆1的倾斜角度,选择性地执行通常控制、在下坡时抑制最大车速的控制(以下,称作待机控制)以及过度旋转防止控制。控制器40在倾斜角度小于第一阈值a1时,通过通常控制决定泵容量与马达容量。在通常控制中,控制器40基于第一泵数据与第一马达数据,决定泵容量与马达容量。
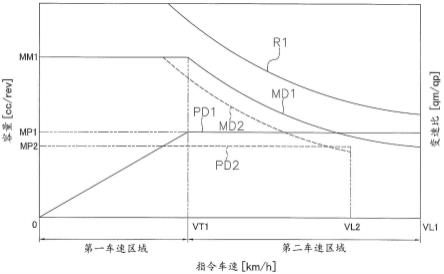
42.图4是表示第一泵数据pd1与第一马达数据md1的一个例子的图。第一泵数据pd1规定指令车速与泵容量的关系。第一马达数据md1规定指令车速与马达容量的关系。控制器40存储有第一泵数据pd1与第一马达数据md1。另外,在图4中,r1表示hst21的变速比相对于指令车速的变化。变速比是马达容量(qm)相对于泵容量(qp)的比例。
43.在倾斜角度小于第一阈值a1时,控制器40参照第一泵数据pd1,决定指令车速所对应的泵容量。在倾斜角度比第一阈值a1小时,控制器40参照第一马达数据md1,决定指令车速所对应的马达容量。
44.第一马达数据md1在指令车速处于第一车速区域内时,以最大容量mm1规定了一定的马达容量。第一车速区域是车速为0以上并且比阈值vt1小的范围。第一泵数据pd1规定了在指令车速为第一车速区域内时根据指令车速的增大而增大的泵容量。因而,在指令车速为第一车速区域内时,控制器40将马达容量保持为一定,并控制泵容量,从而根据指令车速控制hst21的变速比。
45.第一泵数据pd1在指令车速为第二车速区域内时,以最大容量mp1规定了一定的泵容量。第二车速区域是车速为阈值vt1以上的范围。第二车速区域是比第一车速区域高速的指令车速的范围。第一马达数据md1规定了在指令车速为第二车速区域内时根据指令车速的增大而降低的马达容量。因而,在指令车速为第二车速区域内时,控制器40将泵容量保持为一定,并控制马达容量,从而根据指令车速控制hst21的变速比。
46.在倾斜角度为第一阈值a1以上并且比第二阈值a2小时,控制器40通过待机控制,决定泵容量与马达容量。在待机控制中,控制器40基于第二泵数据pd2与第二马达数据md2,决定泵容量与马达容量。控制器40参照第二泵数据pd2,决定指令车速所对应的泵容量。控制器40参照第二马达数据md2,决定指令车速所对应的马达容量。
47.如图4所示,第二泵数据pd2在指令车速至少在第二车速区域内、相对于指令车速规定比第一泵数据pd1小的泵容量。第二泵数据pd2在指令车速为第二车速区域内以最大容量mp2规定了一定的泵容量。第二泵数据pd2中的最大容量mp2比第一泵数据pd1中的最大容量mp1小。控制器40可以存储第二泵数据pd2。或者,控制器40也可以根据第一泵数据pd1生成第二泵数据pd2。
48.第二马达数据md2在指令车速至少在第二车速区域内、相对于指令车速规定比第一马达数据md1小的马达容量。第二马达数据md2在指令车速为第二车速区域内规定了根据指令车速的增大而减少的马达容量。控制器40可以存储第二马达数据md2。或者,控制器40也可以根据第一马达数据md1生成第二马达数据md2。
49.hst21相对于由第二泵数据pd2与第二马达数据md2决定的指令车速的变速比与由第一泵数据pd1与第一马达数据md1决定的指令车速所对应的变速比相同。即,对于相同的指令车速,基于第二泵数据pd2与第二马达数据md2的变速比与基于第一泵数据pd1与第一马达数据md1的变速比相同。
50.在倾斜角度为第二阈值a2以上时,控制器40通过过度旋转防止控制决定泵容量与马达容量。在过度旋转防止控制中,控制器40比倾斜角度小于第二阈值a2时减少限制速度。图5是表示限制速度数据的一个例子的图。如图5所示,在限制速度数据中,在倾斜角度为第一阈值a1以上时,限制速度比第一速度vl1小。第一速度vl1是与换档信号所示的速度范围相应的最高速度。第一速度vl1按每个速度范围而规定。倾斜角度为第一阈值a1以上时,倾
斜角度越大,限制速度越小。
51.详细地说,倾斜角度为通常控制范围内时,限制速度恒定为第一速度vl1。通常控制范围是倾斜角度为0以上并且比第一阈值a1小的范围。倾斜角度在第一限制范围内时,倾斜角度越大,限制速度越小。第一限制范围是第一阈值a1以上并且比第二阈值a2小的范围。第二阈值a2比第一阈值a1大。控制器40在倾斜角度为第一限制范围内时执行上述的待机控制。在待机控制中,根据倾斜角度的增大,限制速度减少到第二速度vl2。
52.倾斜角度为第二限制范围内时,控制器40执行过度旋转防止控制。第二限制范围是倾斜角度为第二阈值a2以上的范围。如图5所示,倾斜角度为第二限制范围内时,倾斜角度越大,限制速度越小。第二限制范围内的限制速度比第一限制范围内的限制速度小。因而,控制器40在过度旋转防止控制中,相比于待机控制减少限制速度。
53.在以上说明的本实施方式的作业车辆1中,在倾斜角度为通常控制范围内时,限制速度被设定为与由换档操作部件38选择的速度范围相应的第一速度vl1。因而,操作人员通过操作换档操作部件38,能够使作业车辆1以希望的车速行驶。
54.在倾斜角度为第一限制范围内上,基于第二泵数据pd2与第二马达数据md2,决定泵容量与马达容量。因此,相比于倾斜角度为通常控制范围内时,泵容量与马达容量减少。由此,能够防止由于下坡时的速度的增大而导致第一、第二液压马达23、26的流量过度地增大。另外,由于能够不急剧减速地对第一、第二液压马达23、26赋予余量,因此能够抑制作业车辆1的操作性的降低。
55.在倾斜角度为第二限制范围内时,与倾斜角度为第一限制范围内时相比,限制速度减少。由此,能够防止下坡时的速度增大引起的发动机20的过度旋转。
56.上述的控制的切换根据倾斜传感器39检测出的倾斜角度来判定。因此,在下坡时,在较早的定时减少泵容量与马达容量。由此,可抑制操作性的降低。
57.以上,虽然说明了本发明的一实施方式,但本发明并不限定于上述实施方式,能够在不脱离发明的主旨的范围内进行各种变更。作业车辆并不局限于推土机,也可以是轮式装载机或者自卸卡车等其他种类的车辆。
58.限制速度并不仅限于倾斜角度,也可以根据其他参数来决定。例如限制速度也可以根据发动机旋转速度与液压回路的差压来决定。
59.第一泵数据pd1与第一马达数据md1并不局限于上述的实施方式,也可以变更。第二泵数据pd2与第二马达数据md2并不局限于上述的实施方式,也可以变更。例如第二泵数据pd2也可以在第一车速区域中也规定比第一泵数据pd1小的泵容量。第二马达数据md2也可以在第一车速区域中也规定比第一马达数据md1小的马达容量。
60.控制器40也可以根据倾斜角度,使用从第一泵数据多级地减少了泵容量的泵数据来决定泵容量。控制器40也可以根据倾斜角度,使用从第一泵数据连续地减少了泵容量的泵数据来决定泵容量。控制器40也可以根据倾斜角度,使用从第一马达数据多级地减少了马达容量的马达数据来决定马达容量。控制器40也可以根据倾斜角度,使用从第一马达数据连续地减少了马达容量的马达数据来决定马达容量。
61.控制器40也可以由多个控制器构成。上述的处理也可以分散在多个控制器中执行。发动机控制器35与控制器40也可以一体地构成。
62.工业上的可利用性
63.根据本公开的作业车辆,能够防止由于下坡时的速度增大而导致液压马达的流量过度地增大,并且能够抑制操作性的降低。
64.附图标记说明
65.12a
ꢀꢀ
第一行驶装置
66.20
ꢀꢀꢀ
发动机
67.21
ꢀꢀꢀ
静液压式变速装置
68.22
ꢀꢀꢀ
第一液压泵
69.23
ꢀꢀꢀ
第一液压马达
70.24
ꢀꢀꢀ
第一液压回路
71.39
ꢀꢀꢀ
倾斜传感器
72.40
ꢀꢀꢀ
控制器
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。