1.本文涉及汽车领域,尤指一种汽车及其电驱传动机构。
背景技术:
2.目前,随着新能源汽车行业的发展,电动汽车已成为发展趋势。由于电动车需要较大的电池增加续航里程,当前市场上所销售的纯电汽车质量均远超于传统燃油汽车。在纯电汽车销量日益增长的趋势下,电动车的轻量化发展势在必行,其对汽车内各零部件的减重要求越来越高。
3.当前电动车变速器设计多为平行轴布局,同时使用传统锥齿轮差速器进行动力输出。这种设计方案占用体积大,重量大。
技术实现要素:
4.为解决上述技术问题,本技术提供了电驱传动机构,其包括:
5.第一行星齿轮机构,包括第一内齿圈、设置在所述第一内齿圈内的第一太阳齿轮以及啮合于所述第一内齿圈的第一行星齿轮、均与所述第一太阳齿轮和所述第一行星齿轮相啮合的第二行星齿轮以及均与所述第一行星齿轮和所述第二行星齿轮转动连接的第一行星架;
6.第二行星齿轮机构,包括固定的第二内齿圈、设置在第二内齿圈内的第二太阳齿轮、均与所述第二内齿圈和所述第二太阳齿轮相啮合的第三行星齿轮以及与所述第三行星齿轮转动连接的第二行星架;
7.第三行星齿轮机构,包括固定的第三内齿圈、设置在第三内齿圈内的第三太阳齿轮、均与所述第三内齿圈和所述第三太阳齿轮相啮合的第四行星齿轮以及与所述第四行星齿轮转动连接的第三行星架;
8.第一半轴,连接于所述第二行星架,且与所述第二太阳齿轮同轴设置;以及
9.第二半轴,连接于所述第三行星架,且与所述第三太阳齿轮同轴设置;
10.其中,所述第一太阳齿轮与所述第二太阳齿轮传动连接,所述第一行星架与所述第三太阳齿轮传动连接。
11.在一个示意性的实施例中,所述第一行星齿轮机构设置在第二行星齿轮机构和所述第三行星齿轮机构之间,所述电驱传动机构还包括
12.第一转轴,两端分别连接所述第一太阳齿轮和所述第二太阳齿轮;以及
13.第二转轴,两端分别连接所述第一行星架和所述第三太阳齿轮;
14.其中,所述第一太阳齿轮、所述第二太阳齿轮、所述第三太阳齿轮、所述第一内齿圈、所述第二内齿圈、所述第三内齿圈、所述第一转轴、所述第二转轴、所述第一半轴和所述第二半轴同轴设置,所述第一行星齿轮、所述第二行星齿轮、所述第三行星齿轮和所述第四行星齿轮的轴线均与所述第一太阳齿轮的轴线平行。
15.在一个示意性的实施例中,所述第一太阳齿轮、所述第二太阳齿轮、所述第三太阳
齿轮、所述第一行星齿轮、所述第二行星齿轮、所述第三行星齿轮和所述第四行星齿轮均为圆柱齿轮。
16.在一个示意性的实施例中,所述电驱传动机构还包括电机,所述电机用于驱动所述第一内齿圈转动。
17.在一个示意性的实施例中,所述电机包括转子,所述转子构造为套设在所述第一内齿圈上的圆环形结构,且能绕自身轴线转动。
18.在一个示意性的实施例中,第一内齿圈的齿数为第一太阳齿轮的齿数的两倍。
19.在一个示意性的实施例中,所述第一行星齿轮和所述第二行星齿轮均设置有多个,多个所述第一行星齿轮分别与多个所述第二行星齿轮相啮合;
20.多个所述第一行星齿轮在所述第一内齿圈的周向上均匀分布,多个所述第二行星齿轮在所述第一太阳齿轮的周向上均匀分布。
21.在一个示意性的实施例中,所述第三行星齿轮和所述第四行星齿轮均设置有多个;
22.多个所述第三行星齿轮在所述第二太阳齿轮的周向上均匀分布,多个所述第四行星齿轮在所述第三太阳齿轮的周向上均匀分布。
23.在一个示意性的实施例中,所述第三行星齿轮包括啮合于所述第二内齿圈的第一子齿轮以及啮合于所述第二太阳齿轮的第二子齿轮;
24.所述第一子齿轮与所述第二子齿轮同轴且相互连接,第一子齿轮的节圆直径小于第二子齿轮的节圆直径;
25.所述第四行星齿轮包括啮合于所述第三内齿圈的第三子齿轮以及啮合于所述第三太阳齿轮的第四子齿轮;
26.所述第三子齿轮与所述第四子齿轮同轴且相互连接,第三子齿轮的节圆直径小于第四子齿轮的节圆直径。
27.本技术还提出了一种汽车,其包括如上所述的任一项电驱传动机构。
28.该电驱传动机构可同时实现变速和差速功能,减小了传动部件的体积与质量,极大的提高了变速器的功率密度。与传统平行轴加锥齿轮差速器相比,减少了所需零件数量,结构更为紧凑,质量更轻。
29.第一行星齿轮机构将扭矩分为两路分别输入到第二行星齿轮机构和第三行星齿轮机构上时,第二行星齿轮机构和第三行星齿轮机构均只承载总扭矩的一半,降低了第二行星齿轮机构和第三行星齿轮机构的结构强度要求,第二行星齿轮机构和第三行星齿轮机构的设计可以更加紧凑化和轻量化。
30.本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
附图说明
31.附图用来提供对本技术技术方案的理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
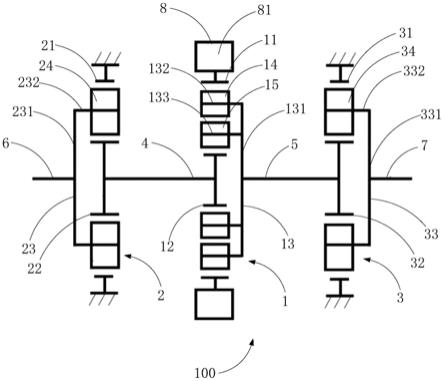
32.图1为本技术实施例一的电驱传动机构的结构示意图;
33.图2为本技术实施例二的电驱传动机构的结构示意图。
具体实施方式
34.实施例一
35.如图1所示,图1显示了本实施例中的一种电驱传动机构100。该电驱传动机构100包括电机8、第一行星齿轮机构1、第二行星齿轮机构2、第三行星齿轮机构3、第一转轴4、第二转轴5、第一半轴6和第二半轴7。
36.第一行星齿轮机构1设置在第二行星齿轮机构2和第三行星齿轮机构3之间。第一行星齿轮机构1包括第一内齿圈11、第一太阳齿轮12、第一行星齿轮14、第二行星齿轮15以及第一行星架13。第二行星齿轮机构2包括第二内齿圈21、第二太阳齿轮22、第三行星齿轮24以及第二行星架23。第三行星齿轮机构3包括第三内齿圈31、第三太阳齿轮32、第四行星齿轮34以及第三行星架33。
37.电机8包括定子和转子81,转子81能相对于定子转动。转子81可以构造为圆环形结构,转子81能绕自身轴线转动。
38.第一内齿圈11构造为圆环形,其内壁上设置有多个齿。第一内齿圈11连接于转子81,且与转子81同轴设置。在本实施例中,第一内齿圈11设置在转子81内,第一内齿圈11的外边缘连接于转子81的内周壁。电机8的转子81能驱动第一内齿圈11转动。
39.第二内齿圈21和第三内齿圈31均构造为圆环形。第二内齿圈21和第三内齿圈31的内壁上设置有多个齿。第二内齿圈21、第三内齿圈31、第一内齿圈11同轴设置,第二内齿圈21和第三内齿圈31分别设置在第一内齿圈11的相对两侧。第二内齿圈21和第三内齿圈31均与第一内齿圈11间隔开来。优选地,第二内齿圈21与第一内齿圈11之间的距离与第三内齿圈31与第一内齿圈11之间的距离相同。第二内齿圈21和第三内齿圈31均固定设置,第二内齿圈21和第三内齿圈31均不能相对于电机8的定子移动。第二内齿圈21和第三内齿圈31可以是外边缘连接于电驱传动机构100的外壳,第二内齿圈21和第三内齿圈31也可以是连接于电驱传动机构100的安装基座。第二内齿圈21和第三内齿圈31的节圆直径可以相同。
40.第一太阳齿轮12构造为圆柱齿轮。第一太阳齿轮12设置在第一内齿圈11内,且与第一内齿圈11同轴。第一太阳齿轮12的外周壁与第一内齿圈11的内周壁之间形成环形间隙。
41.第一行星架13包括第一连接架131、第一行星轴132和第二行星轴133。第一连接架131设置在第一太阳齿轮12的一侧。第一行星轴132和第二行星轴133均连接于第一连接架131。第一行星轴132和第二行星轴133均平行于第一太阳齿轮12的轴向。第一行星轴132和第二行星轴133均伸入到第一太阳齿轮12和第一内齿圈11之间。第一行星轴132相较于第二行星轴133更远离第一太阳齿轮12。第一行星架13被约束为仅能绕第一太阳齿轮12的轴线转动。
42.第一行星齿轮14可以是圆柱齿轮。第一行星齿轮14套设在第一行星轴132上,第一行星齿轮14的轴线与第一太阳齿轮12的轴线平行。第一行星齿轮14能绕第一行星轴132的轴线转动。第一行星齿轮14还与第一内齿圈11相啮合。
43.第二行星齿轮15可以是圆柱齿轮。第二行星齿轮15套设在第二行星轴133上,第二行星齿轮15的轴线与第一太阳齿轮12的轴线平行。第二行星齿轮15能绕第二行星轴133的
轴线转动。第二行星齿轮15与第一太阳齿轮12相啮合,第二行星齿轮15还与第一行星齿轮14相啮合。
44.第一转轴4构造为直条形。第一转轴4的一端连接于第一太阳齿轮12。
45.第一转轴4与第一太阳齿轮12之间可以是键连接,例如平键连接或花键连接。
46.第一转轴4与第一太阳齿轮12同轴设置。
47.第二太阳齿轮22构造为圆柱齿轮。第二太阳齿轮22连接于第一转轴4背离第一太阳齿轮12的一端。第二太阳齿轮22与第一转轴4之间可以是键连接,例如平键连接或花键连接。第二太阳齿轮22与第一转轴4之间同轴设置。第二太阳齿轮22的外径小于第二内齿圈21的内径,第二太阳齿轮22位于第二内齿圈21的内侧。
48.第二行星架23包括第二连接架231和第三行星轴232。第二连接架231设置在第二太阳齿轮22背离第一转轴4的一侧。第三行星轴232连接于第二连接架231。第三行星轴232与第二太阳齿轮22的轴线平行。第三行星轴232伸入到第二太阳齿轮22与第二内齿圈21之间。
49.第三行星齿轮24构造为圆柱齿轮。第三行星齿轮24套设在第三行星轴232上,且能绕第三行星轴232转动,第三行星齿轮24的轴线与第二太阳齿轮22的轴线平行。第三行星齿轮24啮合于第二内齿圈21和第二太阳齿轮22。
50.第一半轴6构造为直条形。第一半轴6设置在第二行星架23背离第一太阳齿轮12的一侧。第一半轴6的一端连接于第二行星架23的第二连接部。第一半轴6与第二太阳齿轮22同轴设置。
51.第二转轴5构造为直条形。第二转轴5设置在第一行星架13的第一连接部背离第一太阳轮的一侧。第二转轴5的一端连接于第一行星架13的第一连接部。第二转轴5与第一太阳齿轮12同轴设置。第二转轴5被约束成仅能绕自身轴线转动。
52.第三太阳齿轮32构造为圆柱齿轮。第三太阳齿轮32连接于第二转轴5背离第一行星架13的一端。第三太阳齿轮32与第二转轴5之间可以是键连接,例如平键连接或花键连接。第三太阳齿轮32与第二转轴5之间同轴设置。第三太阳齿轮32的外径小于第三内齿圈31的内径,第三太阳齿轮32位于第三内齿圈31的内侧。
53.第三行星架33包括第三连接架331和第四行星轴332。第三连接架331设置在第三太阳齿轮32背离第二转轴5的一侧。第四行星轴332连接于第三连接架331。第四行星轴332与第三太阳齿轮32的轴线平行。第四行星轴332伸入到第三太阳齿轮32与第三内齿圈31之间。
54.第四行星齿轮34构造为圆柱齿轮。第四行星齿轮34套设在第四行星轴332上,且能绕第四行星轴332转动,第四行星齿轮34的轴线与第三太阳齿轮32的轴线平行。第四行星齿轮34啮合于第三内齿圈31和第三太阳齿轮32。
55.第二半轴7构造为直条形。第二半轴7设置在第三行星架33背离第一太阳齿轮12的一侧。第二半轴7的一端连接于第三行星架33的第三连接部。第二半轴7与第三太阳齿轮32同轴设置。
56.在本实施例中,电机8驱动第一内齿圈11转动时,转矩从电驱传动机构100的第一内齿圈11输入到电驱传动机构100中,再通过第一半轴6和第二半轴7输出电驱传动机构100。第一半轴6和第二半轴7可以分别外接两个车轮,这样,第一半轴6和第二半轴7可以分
别驱动这两个车轮转动。
57.转矩从第一内齿圈11传递到第一半轴6的路径为:从第一内齿圈11传递到第一行星齿轮14,从第一行星齿轮14传递到第二行星齿轮15,从第二行星齿轮15传递到第一太阳齿轮12,从第一太阳齿轮12传递到第二太阳齿轮22,从第二太阳齿轮22传递到第三行星齿轮24,从第三行星齿轮24传递到第二行星架23,从第二行星架23传递到第一半轴6。
58.转矩从第一内齿圈11传递到第二半轴7的路径为:从第一内齿圈11传递到第一行星齿轮14,从第一行星齿轮14传递到第二行星齿轮15,再通过第一行星齿轮14和第二行星齿轮15共同作用到第一行星架13上,从第一行星架13传递到第三太阳齿轮32,从第三太阳齿轮32传递到第四行星齿轮34,从第四行星齿轮34传递到第三行星架33,从第三行星架33传递到第二半轴7。
59.汽车行驶在平整的路面上且沿直线行驶时,第一半轴6和第二半轴7能以相同的转速分别驱动两个车轮转动,以保证汽车保持直线运动。汽车行驶在不平路面上或汽车在转弯时,第一半轴6和第二半轴7能以不同的转速分别驱动两个车轮转动,以保证这两个车轮在地面上作纯滚动运动。
60.同时,力矩在从电机8输入到第一行星齿轮机构1,并通过第二行星齿轮机构2和第三行星齿轮机构3分别输送到第一半轴6和第二半轴7的过程中降速增矩,使得电驱传动机构100的传动比较大。
61.综上,该电驱传动机构100可同时实现变速和差速功能,减小了传动部件的体积与质量,极大的提高了变速器的功率密度。与传统平行轴加锥齿轮差速器相比,减少了所需零件数量,结构更为紧凑,质量更轻。第一行星齿轮机构1将扭矩分为两路分别输入到第二行星齿轮机构2和第三行星齿轮机构3上时,第二行星齿轮机构2和第三行星齿轮机构3均只承载总扭矩的一半,降低了第二行星齿轮机构2和第三行星齿轮机构3的结构强度要求,第二行星齿轮机构2和第三行星齿轮机构3的设计可以更加紧凑化和轻量化。
62.在本实施例中,第一行星齿轮机构1、第二行星齿轮机构2、第三行星齿轮机构3、第一转轴4、第二转轴5、第一半轴6、第二半轴7和电机8的转子81构造为同轴机构,电驱传动机构100整体上关于第一转轴4的轴线对称布置,使得该电驱传动机构100的结构更加紧凑。
63.第一太阳齿轮12、第二太阳齿轮22、第三太阳齿轮32、第一行星齿轮14、第二行星齿轮15、第三行星齿轮24和第四行星齿轮34均为圆柱齿轮,且轴线相互平行,使得电驱传动机构100的传动效率相较于传统平行轴加锥齿轮差速器更大。
64.在一个示意性的实施例中,第一内齿圈11的齿数为第一太阳齿轮12的齿数的两倍。
65.当第一内齿圈11的齿数为第一太阳齿轮12的齿数的两倍,汽车行驶在平整的路面上且沿直线行驶时第一半轴6和第二半轴7所输出的力矩相等,且第一半轴6和第二半轴7的转速相同。
66.在一个示意性的实施例中,第一行星齿轮14、第二行星齿轮15、第一行星轴132和第二行星轴133均设置有多个,且数量相同。第一行星齿轮14、第二行星齿轮15、第一行星轴132和第二行星轴133的数量优选为均大于或等于3个。多个第一行星齿轮14分别套设在多个第一行星轴132上。多个第二行星齿轮15分别套设在多个第二行星轴133上。多个第一行星齿轮14分别与多个第二行星齿轮15相啮合。
67.多个第一行星齿轮14在第一内齿圈11的周向上均匀分布。多个第二行星齿轮15在第一太阳齿轮12的周向上均匀分布。
68.这样,第一内齿圈11和第一太阳齿轮12的受力更加均匀。
69.第一示意性的实施例中,第三行星齿轮24、第四行星齿轮34、第三行星轴232、第四行星轴332均设置有多个。第三行星齿轮24、第四行星齿轮34、第三行星轴232、第四行星轴332的数量优选为均大于或等于3个。
70.第三行星齿轮24和第三行星轴232的数量相同,第三行星齿轮24一一对应地套设在第三行星轴232上。多个第三行星齿轮24在第二太阳齿轮22的周向上均匀分布。
71.第四行星齿轮34和第四行星轴332的数量相同,第四行星齿轮34一一对应地套设在第搜行星轴上。多个第四行星齿轮34在第三太阳齿轮32的周向上均匀分布。
72.这样,第二内齿圈21、第二太阳齿轮22、第三内齿圈31、第三太阳齿轮32的受力更加均匀。
73.实施例二
74.实施例二中的电驱传动机构100a与实施例一中的电驱传动机构100的主要区别在于第三行星齿轮和第四行星齿轮结构不同,为避免赘述,下面仅介绍实施例二中的电驱传动机构100a区别于实施例一的电驱传动机构100的部分。
75.如图2所示,第三行星齿轮24a包括第一子齿轮241a和第二子齿轮242a。第一子齿轮241a和第二子齿轮242a均套设在第三行星轴232上,且均能绕第三行星轴232转动。第一子齿轮241a和第二子齿轮242a同轴设置,第一子齿轮241a和第二子齿轮242a相互靠近的一端相互连接。第一子齿轮241a啮合于第二内齿圈21,第二子齿轮242a啮合于第二太阳齿轮22。第三行星齿轮24a可以是一体成型的结构。第三行星齿轮24a可以双联齿轮。第一子齿轮241a的节圆直径小于第二子齿轮242a的节圆直径。
76.第四行星齿轮34a包括第三子齿轮341a和第四子齿轮342a。第三子齿轮341a和第四子齿轮342a均套设在第四行星轴332上,且均能绕第四行星轴332转动。第三子齿轮341a和第四子齿轮342a同轴设置,第三子齿轮341a和第四子齿轮342a相互靠近的一端相互连接。第三子齿轮341a啮合于第三内齿圈31,第四子齿轮342a啮合于第三太阳齿轮32。第四行星齿轮34a可以是一体成型的结构。第四行星齿轮34a可以双联齿轮。第三子齿轮341a的节圆直径小于第四子齿轮342a的节圆直径。
77.这样,第二行星齿轮机构2a和第三行星齿轮机构3a能对电驱传动机构进一步进行减速增扭,使得电驱传动机构100a的传动比更大。
78.实施例三
79.本实施例还提出了一种汽车,该汽车包括实施例一或实施例二中的电驱传动机构。
80.本技术描述了多个实施例,但是该描述是示例性的,而不是限制性的,并且对于本领域的普通技术人员来说显而易见的是,在本技术所描述的实施例包含的范围内可以有更多的实施例和实现方案。尽管在附图中示出了许多可能的特征组合,并在具体实施方式中进行了讨论,但是所公开的特征的许多其它组合方式也是可能的。除非特意加以限制的情况以外,任何实施例的任何特征或元件可以与任何其它实施例中的任何其他特征或元件结合使用,或可以替代任何其它实施例中的任何其他特征或元件。
81.本技术包括并设想了与本领域普通技术人员已知的特征和元件的组合。本技术已经公开的实施例、特征和元件也可以与任何常规特征或元件组合,以形成由权利要求限定的独特的发明方案。任何实施例的任何特征或元件也可以与来自其它发明方案的特征或元件组合,以形成另一个由权利要求限定的独特的发明方案。因此,应当理解,在本技术中示出和/或讨论的任何特征可以单独地或以任何适当的组合来实现。因此,除了根据所附权利要求及其等同替换所做的限制以外,实施例不受其它限制。此外,可以在所附权利要求的保护范围内进行各种修改和改变。
82.此外,在描述具有代表性的实施例时,说明书可能已经将方法和/或过程呈现为特定的步骤序列。然而,在该方法或过程不依赖于本文所述步骤的特定顺序的程度上,该方法或过程不应限于所述的特定顺序的步骤。如本领域普通技术人员将理解的,其它的步骤顺序也是可能的。因此,说明书中阐述的步骤的特定顺序不应被解释为对权利要求的限制。此外,针对该方法和/或过程的权利要求不应限于按照所写顺序执行它们的步骤,本领域技术人员可以容易地理解,这些顺序可以变化,并且仍然保持在本技术实施例的精神和范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。