1.本实用新型涉及焊接机器人技术领域,尤其涉及一种用于平面部件焊接的直轨式爬行焊接机器人。
背景技术:
2.现有技术中,针对现有的平板部件焊接固定时,通常需要焊接人员在焊接部位进行手动焊接,但是此种焊接方式效率较低,部分焊接人员通过设置焊接机器人的方式实现平面焊接,但是现有的焊接机器人的在进行焊接时其存在一定的局限性,首先,其对焊接工件具有一定的焊接要求,通用性差;再者,现有的此类焊接机械结构复杂,制作成本高,价格高,使用以及维护成本也高,限制了该类焊接设备的推广;现有的焊接机器人形状较大,一般无法实现机动灵活的使用。
3.本实用新型的通过对现有的焊接机器人进行机械改进,其通过较为简单的机械结构实现对现有的直轨式焊接机器人进行改善,可使其在较低制作成本的前提下、较低使用成本的前提下实现对现有技术中各种技术问题的解决。
技术实现要素:
4.本实用新型的目的在于提供一种直轨式爬行焊接机器人,从而解决现有技术中存在的前述问题。
5.为了实现上述目的,本实用新型采用的技术方案如下:一种直轨式爬行焊接机器人,其包括直轨,所述的直轨的底部设置有磁力座,所述的直轨上设置有驱动齿带和导向槽;所述的直轨上设置有一个驱动仓,驱动仓的底部设置有导向块与导向槽配合;所述的驱动仓的内部设置有横移驱动马达,横移驱动马达的驱动端部设置有啮合齿轮,所述的啮合齿轮和驱动齿带啮合实现驱动;所述的驱动仓的内部设置有一根调整杆,在调整杆的一端设置有调整旋钮,调整杆上设置有螺纹和驱动块连接,驱动块和横移驱动马达连接,横移驱动马达的下部通过旋转支撑座支撑固定,在驱动块的驱动下,实现横移驱动马达与驱动齿带的离合;所述的驱动仓的外部固定有一个焊枪固定模块,所述的焊枪固模块通过延伸杆固定在驱动仓内。
6.所述的焊枪固定模块内部设置有摆动驱动马达,所述的摆动驱动马达的底部设置有驱动齿轮,通过驱动齿轮实现齿条的驱动,所述的齿条上固定有焊枪固定座。
7.所述的延伸杆设置在驱动仓内的滑轨或者滑槽内并在延伸杆上设置有驱动螺杆,通过驱动螺杆驱动延伸杆在滑轨或者滑槽内移动。
8.所述的焊枪固定模块与延伸杆之间设置有转角固定块,所述的转角固定块上设置有一个铰接螺栓孔和一个弧状调节槽,通过两者配合实现焊枪固定模块在延伸杆上的角度调节。
9.所述的驱动仓上设置有工具箱,通过工具箱实现工具的存储。
10.本实用新型的有益效果是:本实用新型通过以上设计,其通过在直轨底面上设置
多个磁力座,直轨侧部设置驱动齿带,直轨顶面设置导向槽,再通过驱动仓内的驱动装置和驱动槽啮合实现其在直轨上的行走;所述的驱动仓的侧部连接设置有焊枪固定模块,并且可实现焊枪固定模块与驱动仓间距的调整,所述的焊枪固定模块内部还设置有摆动驱动马达控制焊枪在一定范围内摆动,以此实现对不同焊缝宽度进行焊接。
11.本实用新型结构设计新颖,其可实现驱动仓在直轨上的行走,并通过齿带以及驱动槽同时与直轨卡固,可有效的防止该设备运行中滑脱;再者,本实用新型还实现了驱动离合装置的设置,可在焊接点实现固定,是一种理想的直轨式爬行焊接机器人。
附图说明
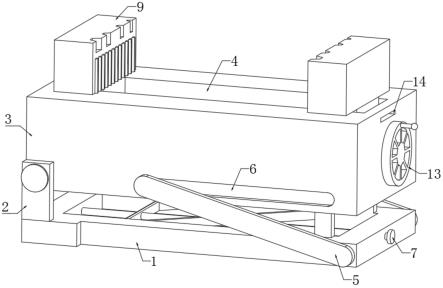
12.图1是本实用新型立体结构示意图;
13.图2是本实用新型侧视结构示意图;
14.图3是本实用新型俯视结构示意图;
15.图4是图2中a向截面结构示意图;
16.图5是图2中b向截面结构示意图;
17.图6是图2中c向截面结构示意图;
18.图7是图3中d向截面结构示意图;
19.附图标记:1-直轨,11-磁力座,12-导向槽,13-驱动齿带,2-驱动仓,21-导向块,22-线束固定座,23-工具箱,24-限位器,3-焊枪固定模块,31-焊枪固定座,32-转角固定块,321-弧状调节槽,322-铰接孔,33-摆动驱动马达,34-驱动齿轮,35-齿条,4-横移驱动马达,41-啮合齿轮,42-旋转支撑座,43-旋转轴,5-滑轨,51-延伸杆,6-驱动离合,61-驱动块,62-调整旋钮,63-调整杆。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,并不用于限定本实用新型。
21.实施例:一种直轨式爬行焊接机器人,其包括直轨1,所述的直轨1的底部设置有多个磁力座11均布实现直轨与焊接平面的固定,所述的直轨1上设置有驱动齿带13和导向槽12;所述的直轨1上设置有一个驱动仓2,驱动仓2的底部设置有导向块21与导向槽12配合;通过此种结构设置,可确保驱动仓2沿着直轨行走,同时通过限位器24实现位置控制。
22.所述的直轨1上设置有一个驱动仓2,驱动仓2的内部设置有横移驱动马达4,横移驱动马达4的驱动端部设置有啮合齿轮41,所述的啮合齿轮41和驱动齿带13啮合实现驱动;通过以上结构设置,可实现本实用新型的横移驱动。
23.在以上结构设置的基础上,本实用新型通过以下所述的驱动离合6实现横移驱动马达4的驱动离合控制,如图6、7所示,所述的驱动仓2的内部设置有一根调整杆63,在调整杆63的一端设置有调整旋钮62,调整杆63上设置有螺纹和驱动块61连接,驱动块61和横移驱动马达4连接,横移驱动马达4的下部设置有旋转轴43,通过旋转轴43与旋转支撑座42支撑固定,在驱动块61的驱动下,实现横移驱动马达4与驱动齿带13的离合,以此实现驱动仓2整体横移驱动的离合。
24.所述的驱动仓2内设置有滑轨5,所述的滑轨5上设置有延伸杆51,所述的延伸杆51上设置有焊枪固定模块3,通过以上结构,可实现焊枪固定模块3与驱动仓2间距的调整,可在一定范围内实现焊接区域的调节;
25.进一步的,如图3所示,焊枪固定模块3与延伸杆51之间设置有转角固定块32,所述的转角固定块32上设置有一个铰接螺栓孔322和一个弧状调节槽321,通过两者配合实现焊枪固定模块3在延伸杆51上的角度调节,以此实现焊枪焊接角度调整。
26.本实用新型在使用时,在遇到焊缝较宽的产品时,单纯采用以上结构无法实现焊接,其必须要求焊头能在焊缝区域摇摆,为实现以上功能,本实用新型采用以下结构:所述的焊枪固定模块3内部设置有摆动驱动马达33,所述的摆动驱动马达33的底部设置有驱动齿轮34,通过驱动齿轮34实现齿条35的驱动,所述的齿条35上固定有焊枪固定座31,通过以上结构设置,可实现焊枪摇摆焊接实现对较宽焊缝的适配。
27.再进一步的,所述的驱动仓2上设置有工具箱23,通过工具箱23实现工具的存储。
技术特征:
1.一种直轨式爬行焊接机器人,其特征在于:其包括直轨,所述的直轨的底部设置有磁力座,所述的直轨上设置有驱动齿带和导向槽;所述的直轨上设置有一个驱动仓,驱动仓的底部设置有导向块与导向槽配合;所述的驱动仓的内部设置有横移驱动马达,横移驱动马达的驱动端部设置有啮合齿轮,所述的啮合齿轮和驱动齿带啮合实现驱动;所述的驱动仓的内部设置有一根调整杆,在调整杆的一端设置有调整旋钮,调整杆上设置有螺纹和驱动块连接,驱动块和横移驱动马达连接,横移驱动马达的下部通过旋转支撑座支撑固定,在驱动块的驱动下,实现横移驱动马达与驱动齿带的离合;所述的驱动仓的外部固定有一个焊枪固定模块,所述的焊枪固模块通过延伸杆固定在驱动仓内。2.根据权利要求1所述的直轨式爬行焊接机器人,其特征在于:所述的焊枪固定模块内部设置有摆动驱动马达,所述的摆动驱动马达的底部设置有驱动齿轮,通过驱动齿轮实现齿条的驱动,所述的齿条上固定有焊枪固定座。3.根据权利要求1所述的直轨式爬行焊接机器人,其特征在于:所述的延伸杆设置在驱动仓内的滑轨或者滑槽内并在延伸杆上设置有驱动螺杆,通过驱动螺杆驱动延伸杆在滑轨或者滑槽内移动。4.根据权利要求3所述的直轨式爬行焊接机器人,其特征在于:所述的焊枪固定模块与延伸杆之间设置有转角固定块,所述的转角固定块上设置有一个铰接螺栓孔和一个弧状调节槽,通过两者配合实现焊枪固定模块在延伸杆上的角度调节。5.根据权利要求1所述的直轨式爬行焊接机器人,其特征在于:所述的驱动仓上设置有工具箱,通过工具箱实现工具的存储。
技术总结
本实用新型公开了一种直轨式爬行焊接机器人,其通过在直轨底面上设置多个磁力座,直轨侧部设置驱动齿带,直轨顶面设置导向槽,再通过驱动仓内的驱动装置和驱动槽啮合实现其在直轨上的行走;所述的驱动仓的侧部连接设置有焊枪固定模块,并且可实现焊枪固定模块与驱动仓间距的调整,所述的焊枪固定模块内部还设置有摆动驱动马达控制焊枪在一定范围内摆动,以此实现对不同焊缝宽度进行焊接。本实用新型结构设计新颖,其可实现驱动仓在直轨上的行走,并通过齿带以及驱动槽同时与直轨卡固,可有效的防止该设备运行中滑脱;还实现了驱动离合装置的设置,可在焊接点实现固定。可在焊接点实现固定。可在焊接点实现固定。
技术研发人员:杨延清
受保护的技术使用者:衡水焊镭焊割科技有限公司
技术研发日:2022.01.12
技术公布日:2022/8/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。