1.本实用新型涉及搬运机器人的技术领域,具体涉及一种搬运机器人的底盘结构。
背景技术:
2.现有的搬运机器人的底盘结构采用一体式的安装结构,或者两段浮动铰接式底盘,其结构简单固定。这样的结构通用性差,不同的负载,不同的外形尺寸,其底盘的结构均不同,设计定型后,可二次开发性差。
技术实现要素:
3.1、实用新型要解决的技术问题
4.针对以上的结构通用性差,不同的负载,不同的外形尺寸,其底盘的结构均不同,设计定型后,可二次开发性差的问题,本技术提供一种搬运机器人的底盘结构。
5.2、技术方案
6.为解决上述问题,本实用新型提供的技术方案为:
7.一种搬运机器人的底盘结构,包括:连接底盘、底盘前体和底盘后体;底盘前体和底盘后体分别连接至连接底盘的两端;连接底盘的两侧形成有安装凹部;安装凹部内可拆卸安装有驱动组件;连接底盘的两侧和驱动组件均形成有安装螺孔;驱动组件通过螺钉依次旋入驱动组件的安装螺孔和连接底盘的安装螺孔固定至安装凹部内;安装凹部内形成有用于支撑驱动组件的支撑部。
8.进一步地,驱动组件包括:安装架、驱动电机、减速机和驱动轮;驱动电机、减速机和驱动轮均安装于安装架上;安装架形成有安装螺孔。
9.进一步地,安装凹部内设有用于缓冲驱动电机和安装凹部内壁之间的作用力的缓冲垫。
10.进一步地,安装凹部形成有用于引导驱动组件进入安装凹部以进行安装的倒角。
11.进一步地,连接底盘和底盘后体一体成型;底盘前体转动连接至连接底盘的远离底盘后体的一侧。
12.进一步地,底盘前体设有连接部;连接部通过连接轴转动连接至连接底盘。
13.进一步地,连接底盘的远离底盘后体的一侧形成有连接凹槽;连接部伸入至连接凹槽内;连接部的上侧抵触连接凹槽的上槽壁。
14.进一步地,底盘前体和底盘后体均可拆卸连接有防撞条。
15.进一步地,底盘前体和底盘后体均安装有辅助脚轮。
16.进一步地,底盘前体和底盘后体为镂空结构。
17.3、有益效果
18.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
19.本技术实施例提出的搬运机器人的底盘结构采用简单的结构,实现快速且稳定得安装驱动组件,便于安装生产,提高生产效率,还能够适配不同的机器人驱动组件,通用性
高。
附图说明
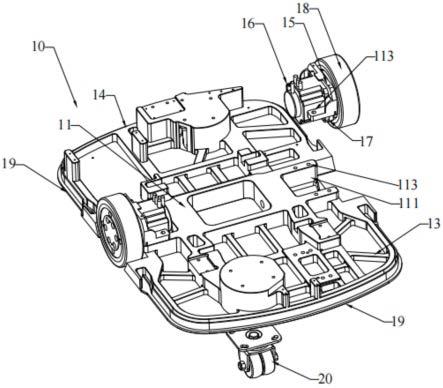
20.图1为本实用新型实施例提出的搬运机器人的底盘结构的结构示意图;
21.图2为图1中的搬运机器人的底盘结构的连接底盘、底盘前体和底盘后体的示意图;
22.搬运机器人的底盘结构10,连接底盘11,安装凹部111,支撑部112,安装螺孔113,倒角114,连接凹槽115,缓冲垫12,底盘前体13,连接部131,连接轴132,底盘后体14,安装架15,驱动电机16,减速机17,驱动轮18,防撞条19,辅助脚轮20。
具体实施方式
23.为进一步了解本实用新型的内容,结合附图及实施例对本实用新型作详细描述。
24.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。本实用新型中所述的第一、第二等词语,是为了描述本实用新型的技术方案方便而设置,并没有特定的限定作用,均为泛指,对本实用新型的技术方案不构成限定作用。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。同一实施例中的多个技术方案,以及不同实施例的多个技术方案之间,可进行排列组合形成新的不存在矛盾或冲突的技术方案,均在本实用新型要求保护的范围内。
25.实施例1
26.如图1至图2所示,为本实用新型的一种搬运机器人的底盘结构10,包括:连接底盘11、底盘前体13和底盘后体14。底盘前体13和底盘后体14分别连接至连接底盘11的两端构成一个整体底盘已安装机器人的零部件。连接底盘11的两侧形成有安装凹部111,在安装凹部111内可拆卸安装有驱动组件以驱动整体底盘。连接底盘11的两侧和驱动组件均形成有安装螺孔113,驱动组件通过螺钉依次旋入驱动组件的安装螺孔113和连接底盘11的安装螺孔113固定至安装凹部111内。这样便于组装更换驱动组件,当需要更换驱动组件,直接将驱动组件整体拆卸下来进行更换就行了。安装凹部111内形成有支撑部112。支撑部112用于支撑驱动组件,从而提高驱动组件的稳定性。
27.作为一种具体的实施方式,驱动组件包括:安装架15、驱动电机16、减速机17和驱动轮18。驱动电机16、减速机17和驱动轮18均安装于安装架15上,从而钩成一个驱动组件整
体,实现整体拆卸。安装架15形成有上述的安装螺孔113,也就是说,通过将安装架15固定至连接底盘11从而实现将驱动组件固定于连接底盘11上。
28.作为一种具体的实施方式,安装凹部111内设有缓冲垫12。缓冲垫12用于缓冲驱动电机16和安装凹部111内壁之间的作用力,这样能对驱动电机16进行较好的防护,延长驱动电机16和减速机17的使用寿命。
29.作为一种具体的实施方式,安装凹部111形成有倒角114。倒角114用于引导驱动组件进入安装凹部111以进行安装,避免驱动组件与连接底盘11发生碰撞。
30.作为一种具体的实施方式,连接底盘11和底盘后体14一体成型。底盘前体13转动连接至连接底盘11的远离底盘后体14的一侧。
31.作为一种具体的实施方式,底盘前体13设有连接部131,连接部131通过连接轴132转动连接至连接底盘11。通过这样连接方式将底盘前体13连接至连接底盘11,结构简单,拆卸方便。
32.作为一种具体的实施方式,连接底盘11的远离底盘后体14的一侧形成有连接凹槽115。连接部131伸入至连接凹槽115内,连接部131的上侧抵触连接凹槽115的上槽壁,这样能够阻止底盘前体13上翘,从而保证机器人行走稳定。
33.作为一种具体的实施方式,底盘前体13和底盘后体14均可拆卸连接有防撞条19,从而对整体底盘进行防护。
34.作为一种具体的实施方式,底盘前体13和底盘后体14均安装有辅助脚轮20,以辅助移动整体底盘,使机器人移动更加稳定。
35.作为一种具体的实施方式,底盘前体13和底盘后体14为镂空结构,这样散热性较好。
36.上述的搬运机器人的底盘结构10采用简单的结构,实现快速且稳定得安装驱动组件,便于安装生产,提高生产效率,还能够适配不同的机器人驱动组件,当有不同需求,需要不同的驱动组件时,只需要更换对应的驱动组件的安装架15即可组成一件新产品,而不需要重新设计底盘,通用性高。
37.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。