1.本发明涉及接受触发器的按压操作来使驱动部驱动的触发开关。
背景技术:
2.作为控制电动工具的动作的触发开关的一种,例如专利文献1已经公开一种可改变马达旋转速度的触发开关。专利文献1所公开的触发开关在按压触发器时,马达的电源接通,当进一步按压触发器时,向马达供给的电压升高,马达的旋转速度提高。另外,用于调整马达的旋转速度上限的调速拨盘组装在触发器中。
3.如专利文献1的例示,已经提出根据触发器的行程、马达的旋转速度升高的各种触发开关。在上述触发开关中,也已经提出如下的触发开关,即,在触发器的开始至中止按压操作的途中具有马达的旋转速度的升高率发生变化的拐点。
4.现有技术文献
5.专利文献
6.专利文献1:(日本)特开2006-231494号公报
技术实现要素:
7.发明所要解决的技术问题
8.然而,在按压操作的途中具有拐点的触发开关中,需要具有可感知拐点的功能。
9.本发明是鉴于上述问题而提出的,目的在于提供一种在按压操作过程中可感知变化的触发开关。
10.用于解决技术问题的技术方案
11.为了解决上述问题,本技术所述的触发开关为具有接受按压操作而移动的触发器的触发开关,其特征在于,具有:对所述触发器向按压方向的相反方向施力的第一施力部件、长度方向与按压方向平行且一端侧安装在所述触发器的轴部件、与所述轴部件的另一端侧连结且可在按压方向上移动的第一可动部件、位于所述第一可动部件的按压方向侧且可在按压方向上移动的第二可动部件、配置在所述第一可动部件及所述第二可动部件之间且在所述第一可动部件及所述第二可动部件相互隔离的方向上进行施力的第二施力部件、以及在按压方向上移动的所述第二可动部件所抵接的抵接部,在所述触发器接受到按压操作的情况下,与接受到按压操作的所述触发器的移动联动,所述轴部件、所述第一可动部件、所述第二可动部件以及所述第二施力部件向按压方向移动,所述第一施力部件根据所述触发器的按压量,对所述触发器向按压方向的相反方向施力,在从移动的所述第二可动部件与所述抵接部抵接的状态、所述触发器进一步接受到按压操作时,与接受到按压操作的所述触发器的移动联动,所述轴部件及所述第一可动部件向按压方向移动,所述第二施力部件根据所述第一可动部件及所述第二可动部件的间隔,对所述第一可动部件向按压方向的相反方向施力。
12.另外,基于所述触发开关,其特征在于,所述第一施力部件及所述第二施力部件使
用弹性体来形成。
13.另外,基于所述触发开关,其特征在于,具有收纳所述第一可动部件、所述第二可动部件及所述第二施力部件的筐体,所述筐体具有开设使所述轴部件贯通的贯通孔的壁部,所述第一施力部件卷绕所述轴部件,一端与在所述筐体开设的所述贯通孔的周围的壁部相接。
14.另外,基于所述触发开关,其特征在于,所述第一可动部件及所述第二可动部件以不隔离规定的间隔以上的方式卡合。
15.另外,基于所述触发开关,其特征在于,具有控制部,该控制部将以对应于所述触发器的按压量的驱动速度使驱动部驱动的驱动信号进行输出,驱动速度相对于按压量的变化的升高率在所述第二可动部件与所述抵接部抵接之前和与所述抵接部抵接之后不同。
16.发明的效果
17.本发明的触发开关具有通过使用多个施力部件能够在按压操作过程中感知操作负荷的变化等良好的效果。
附图说明
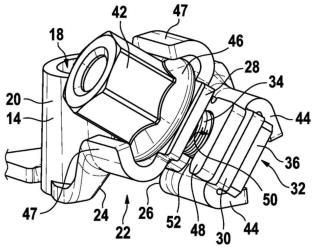
18.图1是表示本技术所述的触发开关的外观的一个例子的立体概要图。
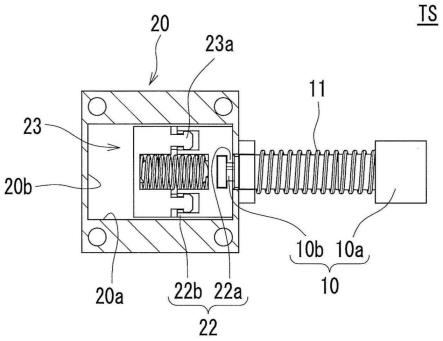
19.图2是表示本技术所述的触发开关的主要部件的一个例子的立体概要图。
20.图3是表示本技术所述的触发开关的主要部件的内部结构的一个例子的立体分解概要图。
21.图4是以一部分剖开的状态表示本技术所述的触发开关的主要部件的一个例子的立体概要图。
22.图5是以一部分剖开的状态表示本技术所述的触发开关的主要部件的一个例子的侧视概要图。
23.图6是以一部分剖开的状态表示本技术所述的触发开关的主要部件的一个例子的侧视概要图。
24.图7是以一部分剖开的状态表示本技术所述的触发开关的主要部件的一个例子的侧视概要图。
25.图8是以一部分剖开的状态表示本技术所述的触发开关的主要部件的一个例子的侧视概要图。
26.图9是表示本技术所述的触发开关的按压量与操作负荷的关系的曲线图。
27.图10是表示组装有本技术所述的触发开关的电动装置所具有的控制结构的一部分的例子的方块概要图。
具体实施方式
28.下面,参照附图,针对本发明的实施方式进行说明。
29.<应用例>
30.本技术所述的触发开关应用在以具有马达等驱动部的电钻、电锯、电驱动器、电动扳手、电动磨机等电动工具为主的各种电动装置中。在如下的实施方式中,参照附图,例示并说明上述触发开关ts。
31.<实施方式>
32.图1是表示本技术所述的触发开关ts的外观的一个例子的立体概要图。图1表示可在电动工具等各种电动装置et(参照图10)中组装的触发开关ts的外观。触发开关ts是电动装置et的操作者进行操作的开关,通过操作者进行按压触发开关ts的触发器1的按压操作,在电动装置et中内置的电动马达等驱动部m(参照图10)进行驱动。触发开关ts具有在电动装置et中组装的大致长方体状的筐体2、以及操作者可按压的触发器1。另外,触发开关ts具有对驱动部m的驱动方向、例如电驱动器的旋转方向的正反向进行切换的切换杆3。需要说明的是,在以后的说明中,对于触发开关ts的方向,将安装有触发器1的一方作为前方,将筐体2侧作为后方,虽然适当将后方表现为按压方向,但这只是便于说明的方向,并非用于限定触发开关ts使用时的方向。
33.针对触发开关ts的内部结构进行说明。图2是表示本技术所述的触发开关ts的主要部件的一个例子的立体概要图。图2将在触发开关ts的内部组装的机构表示为简化后的主要部件。作为主要部件而表示的机构为,拆下触发器1,使由触发器1覆盖的轴部件10露出,将筐体2之中与触发器1的按压操作相关的部分抽出作为筐体主要部件20来表示。轴部件10在作为前部的一端侧安装有触发器1,另一端侧贯通在筐体主要部件20的前表面的壁部21开设的贯通孔21a而收纳在筐体主要部件20的内部。轴部件10的一端侧的前端成为在径向上伸出的安装部10a。在轴部件10卷绕有压缩螺旋弹簧等第一施力部件11。第一施力部件11的前端与伸出的安装部10a的后端相接,第一施力部件11的后端与在筐体主要部件20的壁部21开设的贯通孔21a周围的壁部21相接。后端与筐体主要部件20的外壁相接的第一施力部件11在前端对轴部件10向前方施力。在触发器1接受到按压操作的情况下,轴部件10与触发器1一起向后方移动。在按压操作被解除的情况下,第一施力部件11向作为触发器1的按压方向的相反方向的前方进行施力,所以触发器1与轴部件10一起向前方移动。
34.图3是表示本技术所述的触发开关ts的主要部件的内部结构的一个例子的立体分解概要图。图4是以一部分剖开的状态表示本技术所述的触发开关ts的主要部件的一个例子的立体概要图。图5是以一部分剖开的状态表示本技术所述的触发开关ts的主要部件的一个例子的侧视概要图。图4及图5是将触发开关ts的主要部件以通过图2所示的a-b的垂直面进行切割、可看到内部的一部分剖视图。在筐体主要部件20内,除了作为轴部件10后部的另一端侧以外,还收纳有第一可动部件22、第二可动部件23、第二施力部件24等各种部件。
35.第一可动部件22及第二可动部件23形成为大致长方体形状,沿着在筐体主要部件20内形成的、在前后方向(触发器1的按压方向)上延伸的引导通路20a,在前后各方向上可移动地进行配置。第一可动部件22配置在前方,第二可动部件23配置在后方。配置在后方的第二可动部件23可移动至与作为引导通路20a的后端的抵接部20b抵接。在轴部件10的后端部附近,在周向上刻设有围绕外周面的卡止槽10b。在第一可动部件22的前表面形成有插入轴部件10的卡止槽10b并对第一可动部件22进行卡止的卡止部22a。通过由第一可动部件22的卡止部22a对轴部件10的卡止槽10b进行卡止,轴部件10的后端与第一可动部件22的前表面连结。
36.在第一可动部件22的后部形成有卡合母部22b,在第二可动部件23的前部形成有卡合公部23a。第一可动部件22的卡合母部22b形成有可插入第二可动部件23的卡合公部23a的凹部,凹部的前端向内侧弯曲为钩状。第二可动部件23的卡合公部23a形成有可在第
一可动部件22的卡合母部22b中插入的凸部,凸部的前端向外侧伸出。第二可动部件23的卡合公部23a以可移动的状态插入第一可动部件22的卡合母部22b中。第一可动部件22及第二可动部件23虽然能够在前后方向上各自独立地移动,但通过第一可动部件22的卡合母部22b的前端及第二可动部件23的卡合公部23a的前端进行卡合,以不隔离规定的间隔以上的方式进行组合。
37.第二施力部件24例如使用压缩螺旋弹簧来形成。第二施力部件24配置在第一可动部件22及第二可动部件23之间,在相互隔离的方向上进行施力。第二施力部件24的弹性系数与第一施力部件11的弹性系数不同。具体而言,第二施力部件24使用弹性系数比第一施力部件11大的压缩螺旋弹簧,第二施力部件24的压缩需要比第一施力部件11大的力。
38.接着,针对本技术所述的触发开关ts的操作及动作进行说明。图6是以一部分剖开的状态表示本技术所述的触发开关ts的主要部件的一个例子的侧视概要图。图6是未接受按压触发器1的操作的状态。在图6例示的状态中,被第一施力部件11施力,轴部件10向前方侧移动。需要说明的是,虽然在图6中未进行例示,但在轴部件10的前端安装的触发器1是移动至移动范围的前端的状态。与向前方移动的轴部件10的后端连结的第一可动部件22位于移动范围的前端。第二可动部件23被第二施力部件24施力,在向后端侧与第一可动部件22隔离至规定的间隔的位置上,与第一可动部件22卡合。
39.图7是以一部分剖开的状态表示本技术所述的触发开关ts的主要部件的一个例子的侧视概要图。图7表示从图6例示的状态进行使触发器1向后方移动的按压操作直至第二可动部件23的后端与作为筐体主要部件20后方的内壁的抵接部20b抵接的、操作者按压触发器1的状态。操作者与第一施力部件11的作用力对抗来按压触发器1,直至第二可动部件23的后端与筐体主要部件20的抵接部20b抵接。安装有触发器1的轴部件10与触发器1的移动联动而向后方移动,第一施力部件11根据按压量进行压缩。第一施力部件11根据触发器1的按压量进行压缩,并且向作为按压方向的相反方向的前方对触发器1进行施力。与轴部件10的后端连结的第一可动部件22及第二可动部件23在被第二施力部件24施力并维持规定的间隔的状态下,与触发器1的移动联动而将引导通路20a向后方移动。
40.图8是以一部分剖开的状态表示本技术所述的触发开关ts的主要部件的一个例子的侧视概要图。图8表示从图7例示的状态,进一步进行使触发器1向后方移动的按压操作,直至按压范围的极限的按压状态。在从图6例示的第二可动部件23的后端与筐体主要部件20的抵接部20b抵接的状态进一步按压触发器1的情况下,操作者与第一施力部件11及第二施力部件24的作用力对抗来按压触发器1。安装有触发器1的轴部件10与触发器1的移动联动,进一步向后方移动,第一施力部件11根据按压量进一步被压缩。第一施力部件11根据触发器1的按压量进行压缩,并且向前方对触发器1进行施力。与轴部件10的后端连结的第一可动部件22与触发器1的移动联动,将引导通路20a向后方移动。因为第二可动部件23不能从与抵接部20b抵接的状态向后方移动,所以,第一可动部件22与第二施力部件24的作用力对抗而向后方移动,第二施力部件24根据按压量被压缩。
41.如上所述,在触发开关ts的触发器1被按压的情况下,操作者与第一施力部件11的作用力对抗,按压触发器1直至第二可动部件23与抵接部20b抵接。在触发器1被进一步按压的情况下,操作者与第一施力部件11及第二施力部件24的作用力对抗,按压触发器1。
42.当操作者解除触发器1的按压操作时,利用第一施力部件11及第二施力部件24的
作用力,恢复至图6例示的状态。
43.接着,作为本技术所述的触发开关ts的操作特性,对操作者对触发器1进行按压操作时的按压量与作为按压操作所需要的负载的操作负荷的关系进行说明。图9是表示本技术所述的触发开关ts的按压量与操作负荷的关系的曲线图。在图9中,在横轴将触发器1的按压量采用为行程,在纵轴采用为触发器1的操作所需要的负荷,来表示其关系。在开始按压触发器1的情况下,最初是几乎无负荷的状态,即设定所谓的游隙。当按压触发器1超过游隙时,与第一施力部件11的作用力对抗来按压触发器1,所以根据行程量,负荷增大。负荷相对于行程的倾斜度取决于第一施力部件11的弹性系数。在曲线图中,作为tt1而表示的位置为第二可动部件23与抵接部20b抵接的位置,此时的负荷为ttf1。
44.当从作为tt1而表示的位置进一步按压触发器1时,因为要与第一施力部件11及第二施力部件24的合力对抗进行按压,所以负荷升高至of1,此外,根据行程量,负荷增大。负荷相对于行程的倾斜度取决于第一施力部件11及第二施力部件24的弹性系数。在图9中,表示在将触发器1按压至作为按压范围的极限的tt2的情况下,负荷为ttf2。
45.具有图9例示的操作特性的本技术所述的触发开关ts通过使驱动部m、例如马达的旋转速度的升高率的拐点与tt1的位置结合,操作者能够将升高率的拐点感知为操作负荷的变化。例如,在tt1之前旋转速度根据按压量缓慢升高、当超过tt1时旋转速度根据按压量急剧升高地设计的情况下,具有操作者通过操作负荷的变化能够感知旋转速度的升高率的拐点这样的效果。另外,即使是在tt1之前旋转速度根据按压量急剧升高、当超过tt1时旋转速度缓慢升高地设计的情况下也能够得到相同的效果。此外,在tt1之前旋转速度与按压量无关而恒定、当超过tt1时旋转速度根据按压量而升高这样的设计、以及在tt1之前旋转速度升高、当超过tt1时使旋转速度恒定的设计等设计的情况下也能够得到相同的效果。
46.接着,针对组装有本技术所述的触发开关ts的电动装置et的结构例进行说明。图10是表示组装有本技术所述的触发开关ts的电动装置et所具有的控制结构的一部分的例子的方块概要图。电动工具等电动装置et在主体装置mu中组装触发开关ts而形成。主体装置mu具有马达等驱动部m。触发开关ts具有:检测触发器1的按压量的按压量检测部4、以及根据按压量向主体装置mu输出驱动信号的控制部5。
47.按压量检测部4是通过接触或者非接触来检测按压量的机构。例如,作为接触检测,可以例示在筐体主要部件20与第一可动部件22安装电极、基于利用电极的接触面积来变化的电阻值来检测按压量的方法。另外,作为非接触检测,可以例示利用检测电场变化的接近传感器等非接触传感器来检测按压量的方法。
48.触发开关ts的控制部5例如是使用被印刷配线的基板、以及使用了在基板上配置的各种lsi、vlsi等集成回路的微型计算机、电子元件及各种端子构成的回路。控制部5接收按压量检测部4的检测结果作为输入,基于检测结果执行各种处理,将使电动装置et的主体装置mu所具有的马达等驱动部m驱动的驱动信号向主体装置mu输出。电动装置et基于向主体装置mu输入的驱动信号,驱动驱动部m。
49.如上所述,本技术所述的触发开关ts具有第一施力部件11及第二施力部件24、以及第一可动部件22及第二可动部件23,通过使上述部件协作,能够在触发器1的按压途中使负荷变化。由此,例如在相对于按压量具有驱动部m的驱动速度的升高率的拐点的电动装置et中应用的情况下,具有能够将拐点的位置感知为操作负荷的变化等良好的效果。
50.本发明不限于如上说明的各实施方式,也可以以其它的各种方式来实施。因此,上述实施方式在所有方面只是单纯的例示,并非限定性的说明。本发明的技术范围由权利要求范围来说明,不局限于说明书本文。此外,属于权利要求范围的等同范围内的变形及变更都包含在本发明的范围内。
51.例如,在所述实施方式中,作为第一施力部件11及第二施力部件24,例示了使用压缩螺旋弹簧的方式,但本发明不限于此,可以使用具有相同功能的其它的弹性体。例如,第一施力部件11及第二施力部件24的一方或者双方可以使用板簧等弹性体。另外,在所述实施方式中,例示了第二施力部件24的弹性系数比第一施力部件11大的方式,但本发明不限于此。例如,第一施力部件11及第二施力部件24的弹性系数也可以大致相同,此外,也可以使第一施力部件11的弹性系数较大而构成。
52.另外,例如在所述实施方式中,表示了控制部5收纳在筐体2内的方式,但本发明不限于此,可以展开为将控制部5向筐体2之外取出、收纳在主体装置mu内的方式等各种方式。
53.附图标记说明
54.ts触发开关;1触发器;10轴部件;11第一施力部件;2筐体;20筐体主要部件;20a抵接部;21壁部;21a贯通孔;22第一可动部件;23第二可动部件;24第二施力部件;26第二施力部件;5控制部;et电动装置;mu主体装置;m驱动部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。