1.本实用新型涉及一种水下机器人用推进器。
背景技术:
2.水下机器人作为水下科研、探测、搜索等活动常用的设备,需要在各种水况中移动,现有水下推进器一般包括导流罩、电机和桨叶等结构。当水下机器人在水底巡游时,若水中水体复杂如水草茂盛或者水中悬浮物较多时,水草或线容易缠绕在桨叶上而导致电机卡滞甚至过载损坏,悬浮物撞击在桨叶上也容易导致桨叶本身的损坏。这就限制了水下巡游机器人的适用场景。
技术实现要素:
3.本实用新型的目的在于提供一种水下机器人用推进器,用以解决水下机器人的推进器容易被水草等杂物缠绕或悬浮物撞击而破损的技术问题。
4.本实用新型的技术方案如下:一种水下机器人用推进器,包括电机、由电机驱动而旋转的桨叶、罩设在电机和桨叶外进行导流防护的导流罩,导流罩包括圆筒以及安装在圆筒两端的导流头,导流头通过径向均布的辐条安装在圆筒的内壁上,电机安装在两端的导流头之间,桨叶的旋转轴线与圆筒的轴线共线,还包括:
5.安装罩,呈一端开口的喇叭状,通过开口一端套在导流罩前端的导流头上;
6.切割叶轮,包括圆环以及辐射状固定在圆环外周面上的切割叶片,切割叶片倾斜设置以在受到水流冲击时能够沿一个方向旋转,切割叶片的边缘处设置有刀刃;
7.轴承,内圈安装在安装罩的远离开口的一端,外圈固定在所述圆环内;
8.电机带动桨叶旋转而前进时,切割叶轮被水流推动而旋转。
9.进一步地,所述切割叶片的材质为钢材。
10.进一步地,所述安装罩的开口的一端分别与对应的导流头上的辐条一一对应设置有避让槽,安装罩通过避让槽卡在辐条上。
11.进一步地,安装罩具有一定弹性,安装罩通过自身的弹性力卡在对应的导流头上。
12.进一步地,圆筒的外周上设置有用于与水下机器人连接的连接盘,连接盘上设置有多个螺钉孔。
13.本实用新型的有益效果:本实用新型的一种水下机器人用推进器在使用时,将推进器安装在水下机器人上,一般一个水下机器人设置多个推进器,启动推进器后,电机旋转以带动桨叶旋转,从而对推进器产生向前的推进力,位于前端的切割叶轮受到向后的水流的推动而旋转,旋转速度与前进速度成正比关系,轴承的设置使得切割叶轮旋转十分顺畅,此时,安装罩前方的水流中的悬浮物会直接撞击在安装罩的前端,而圆筒与导流头之间的环形间隙前方的水流中的悬浮物则被前方的切割叶轮拨向一边,防止水中的悬浮物进入圆筒内而撞击桨叶;同理,水中的水草或线首先接触切割叶轮,对于比较容易切割的会被切断,对于不易切割的韧性线束,要么被切割叶轮产生的力而拨走,要么缠绕在切割叶轮上,
即使缠绕在切割叶轮上,由于切割叶轮是通过轴承安装在安装罩上,切割叶轮被缠绕而卡滞不会对桨叶的旋转造成影响,更不会导致电机卡滞甚至过载损坏,从而保护了桨叶和电机的安装运行。
附图说明
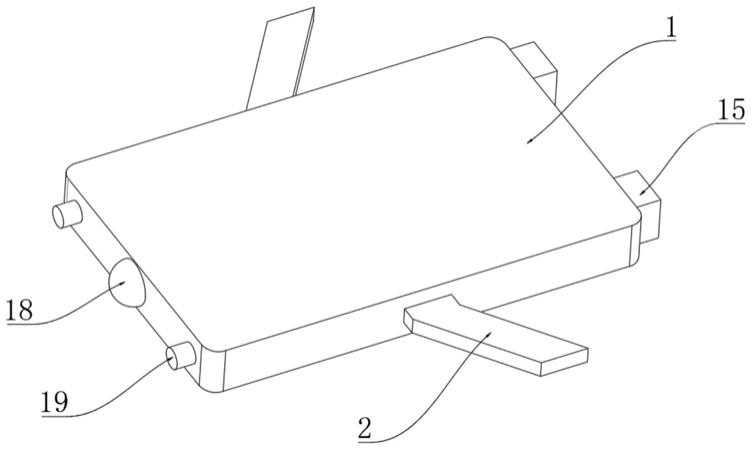
14.图1为本实用新型的一种水下机器人用推进器的一种实施方式的整体结构示意图;
15.图2为图1的爆炸视图;
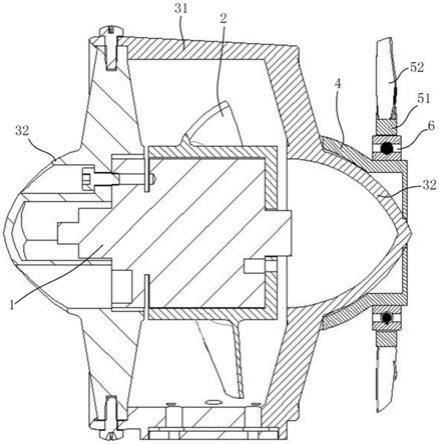
16.图3为图1沿中心轴线方向剖开后的立体图;
17.图4为图3的主视图;
18.图5为拆除圆筒和前端的导流头后的立体图;
19.图6为安装罩的立体图;
20.图中:1-电机,2-桨叶,3-导流罩,31-圆筒,32-导流头,33-辐条,4-安装罩,41-开口,42-避让槽,5-切割叶轮,51-圆环,52-切割叶片,6-轴承,61-内圈,62-外圈,63-滚子。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型,即所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
22.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
24.以下结合实施例对本实用新型的特征和性能作进一步的详细描述。
25.本实用新型的水下机器人用推进器的一种实施方式:如图1-6所示,水下机器人用推进器包括电机1、由电机1驱动而旋转的桨叶2、罩设在电机1和桨叶2外进行导流防护的导流罩3,导流罩3包括圆筒31以及安装在圆筒31两端的导流头32,导流头32通过径向均布的辐条33安装在圆筒31的内壁上,电机1安装在两端的导流头32之间,桨叶2的旋转轴线与圆筒31的轴线共线。圆筒31的外周上设置有用于与水下机器人连接的连接盘,连接盘上设置有多个螺钉孔。
26.安装罩4呈一端开口41的喇叭状,通过开口41一端套在导流罩3前端的导流头32上;安装罩4的开口41的一端分别与对应的导流头32上的辐条33一一对应设置有避让槽42,安装罩4通过避让槽42卡在辐条33上。安装罩4具有一定弹性,安装罩4通过自身的弹性力卡在对应的导流头32上。
27.切割叶轮5包括圆环51以及辐射状固定在圆环51外周面上的切割叶片52,切割叶片52倾斜设置以在受到水流冲击时能够沿一个方向旋转,切割叶片52的边缘处设置有刀刃;切割叶片52的材质为钢材。
28.轴承6内圈61安装在安装罩4的远离开口41的一端,外圈62固定在所述圆环51内;电机1带动桨叶2旋转而前进时,切割叶轮5被水流推动而旋转。
29.本实用新型的一种水下机器人用推进器在使用时,将推进器安装在水下机器人上,一般一个水下机器人设置多个推进器,启动推进器后,电机1旋转以带动桨叶2旋转,从而对推进器产生向前的推进力,位于前端的切割叶轮5受到向后的水流的推动而旋转,旋转速度与前进速度成正比关系,轴承6的设置使得切割叶轮5旋转十分顺畅,此时,安装罩4前方的水流中的悬浮物会直接撞击在安装罩4的前端,而圆筒31与导流头32之间的环形间隙前方的水流中的悬浮物则被前方的切割叶轮5拨向一边,防止水中的悬浮物进入圆筒31内而撞击桨叶2;同理,水中的水草或线首先接触切割叶轮5,对于比较容易切割的会被切断,对于不易切割的韧性线束,要么被切割叶轮5产生的力而拨走,要么缠绕在切割叶轮5上,即使缠绕在切割叶轮5上,由于切割叶轮5是通过轴承6安装在安装罩4上,切割叶轮5被缠绕而卡滞不会对桨叶2的旋转造成影响,更不会导致电机1卡滞甚至过载损坏,从而保护了桨叶2和电机1的安装运行。
30.以上所述,仅为本实用新型的较佳实施例,并不用以限制本实用新型,本实用新型的专利保护范围以权利要求书为准,凡是运用本实用新型的说明书及附图内容所作的等同结构变化,同理均应包含在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。