1.本实用新型涉及船舶清洗装置领域,尤其涉及一种船舶清洗装置。
背景技术:
2.国内船舶清洗业务仍然以潜水员携带清洗设备下水作业为主,或进坞清洗,经济成本高,耗费大量劳动力,清洗用时较长。目前已提出的船舶清洗装置设计方案中,磁吸附类普遍存在刚性本体结构无法完全适应船舶复杂变曲率壁面的问题;螺旋桨推力吸附类受使用环境约束,仅能用于水下作业,因此需船舶满载清洗,耽误货物运输,且运动控制精度低。另外,现有的设计方案中均未考虑增加残渣回收装置。
技术实现要素:
3.针对上述现有技术中的不足,本实用新型提供一种船舶清洗装置,通过永磁体轮吸附于船舶表面,采用柔性的轮腿复合式移动机构,可适应任意曲率的复杂壁面,同时具备残渣回收处理能力。
4.为了实现上述目的,本实用新型提供一种船舶清洗装置,包括一机器人壳体、四个行走机构、一清洗装置、一回收装置和一控制舱;所述行走机构两两对应地连接于所述机器人壳体的两侧,所述清洗装置和所述回收装置连接于所述机器人壳体的底部;所述控制舱固定于所述机器人壳体内;所述行走机构包括依次连接的一一段腿结构、一二段腿结构、一三段腿结构和一轮结构。
5.优选地,所述机器人壳体包括一罩子、一横撑板、多个拉环、多个挂钩、多个拉环固定座、多个上浮力材料和多个下浮力材料;所述横撑板的两端分别通过螺接固定有一所述上浮力材料和一所述下浮力材料;所述横撑板的两端设置有所述拉环固定座;所述拉环可转动地连接于所述拉环固定座;所述罩子的两端设置有所述挂钩,所述挂钩与所述拉环配合;所述罩子通过所述挂钩和所述拉环可拆卸地固定于所述横撑板上;所述罩子顶面中部形成一第一通孔;所述横撑板的中部形成一第二通孔,所述第二通孔的外侧开设有一第三通孔。
6.优选地,所述一段腿结构包括一腿安装槽、一一段腿架、一扭力弹簧、一槽内轴、两第一手拧螺丝、一十字杆、两滑块、一压缩弹簧、一十字杆套筒和一一段腿架支撑法兰板;所述腿安装槽与所述横撑板螺接固定;所述槽内轴的两端通过所述第一手拧螺丝固定于所述腿安装槽内;所述扭力弹簧和所述一段腿架的第一端穿设于所述槽内轴上,所述扭力弹簧的中部固定于所述腿安装槽内,所述扭力弹簧两侧的弹簧臂穿插于所述一段腿架内;所述一段腿架的第二端两侧分别形成一第一滑槽,所述十字杆的左右两端分别通过一滑块可沿所述第一滑槽滑动地连接于所述第一滑槽;所述一段腿架支撑法兰板连接于所述十字杆前方的所述一段腿架的内侧,所述十字杆套筒固定于所述一段腿架支撑法兰板的中部;所述十字杆的前端穿设于所述十字杆套筒内;所述压缩弹簧套设于所述十字杆的前端。
7.优选地,所述二段腿结构包括一二段腿架、一二段腿架内轴、两轴固定螺丝、两轴
套、一u形架和一二段腿架支撑法兰板;所述二段腿架内轴的两端通过所述轴固定螺丝固定于所述二段腿架的内侧;所述u形架可转动地穿设于所述二段腿架内轴上,所述u形架与所述二段腿架之间的所述二段腿架内轴上套设有所述轴套;所述二段腿架的第一端与所述一段腿架的第二端枢接;所述u形架的端部枢接于所述十字杆上;所述二段腿架支撑法兰板连接于所述二段腿架的第二端。
8.优选地,所述三段腿结构包括一三段腿架、一限位轴、一槽铝、一开口销、一第二手拧螺丝和一腿轮连接架;所述三段腿架的顶部螺接固定于所述二段腿架支撑法兰板下;所述槽铝通过所述限位轴可转动地连接于所述三段腿架内;所述限位轴伸出所述三段腿架的一端连接有所述开口销;所述三段腿架的一侧开设有一弧形槽,所述第二手拧螺丝穿过所述弧形槽与所述槽铝螺接;所述腿轮连接架固定于所述槽铝的底部。
9.优选地,所述轮结构包括一驱动电机、一轮架、两磁轮、一传动带、两同步带轮和多个薄橡胶轮;所述驱动电机和所述磁轮安装于所述轮架上;所述轮架连接于所述腿轮连接架下;两所述磁轮的转轴一端分别连接所述同步带轮,所述驱动电机的输出轴通过所述传动带和所述同步带轮与两所述磁轮传动连接;所述磁轮的两侧分别固定有一所述薄橡胶轮。
10.优选地,所述清洗装置包括一清洗盘、多个z形安装架、多个万向轮、一高压水管、一连接套、一清洗头、多个螺栓和多个弹簧;所述清洗盘通过所述螺栓固定于所述横撑板下方,所述螺栓外套设有所述弹簧;所述清洗盘的外表面沿周向均布连接有所述z形安装架;所述z形安装架的底端安装有所述万向轮;所述清洗头固定于所述清洗盘内;所述高压水管通过所述连接套连接所述清洗盘并与所述清洗头连通;所述高压水管自所述第二通孔和所述第一通孔穿出。
11.优选地,所述回收装置包括一回收罩、一波纹管和多个辅助永磁块;所述回收罩固定于所述横撑板下方并罩设于所述清洗盘外;所述辅助永磁块固定于所述回收罩的底边;所述波纹管一端与所述回收罩连通,所述波纹管的另一端自所述第三通孔和所述第一通孔穿出。
12.优选地,所述控制舱包括一前端盖、一后端盖、两密封环、一舱筒、一控制舱安装座、两抱箍、若干水密插头和一控制单元;所述前端盖和所述后端盖分别连接于所述舱筒的两端,所述前端盖与所述舱筒之间和所述后端盖与所述舱筒之间设置有所述密封环;所述控制单元设置于所述舱筒内,所述水密插头设置于所述后端盖并与所述控制单元电连接;所述舱筒通过套设于所述舱筒外的所述抱箍连接于所述控制舱安装座上;所述控制舱安装座固定于所述横撑板上。
13.本实用新型由于采用了以上技术方案,使其具有以下有益效果:
14.通过一段腿结构、二段腿结构、三段腿结构和轮结构的配合,获得柔性的轮腿复合式移动机构,可适应任意曲率的复杂壁面;同时回收装置的采用,可实现残渣回收处理。
附图说明
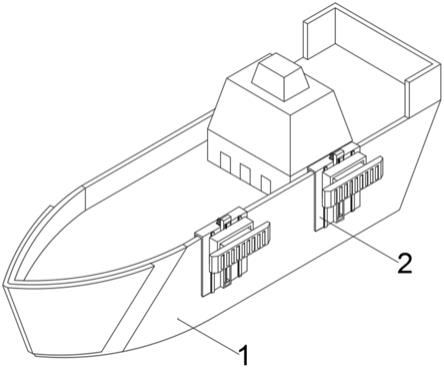
15.图1为本实用新型实施例的船舶清洗装置第一方向的结构示意图;
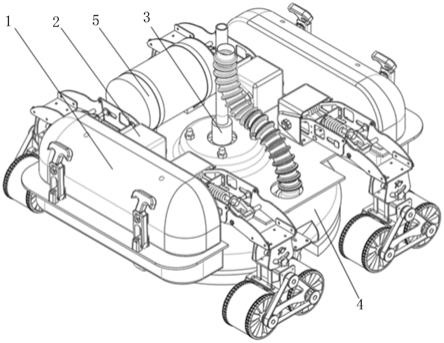
16.图2为本实用新型实施例的船舶清洗装置的内部结构示意图;
17.图3为本实用新型实施例的船舶清洗装置第二方向的结构示意图;
18.图4为本实用新型实施例的机器人壳体第一方向的结构示意图;
19.图5为本实用新型实施例的机器人壳体第二方向的结构示意图;
20.图6为本实用新型实施例的行走机构的结构示意图;
21.图7为本实用新型实施例的一段腿结构的结构示意图;
22.图8为本实用新型实施例的二段腿结构的结构示意图;
23.图9为本实用新型实施例的三段腿结构的结构示意图;
24.图10为本实用新型实施例的轮结构的结构示意图;
25.图11为本实用新型实施例的清洗装置第一方向的结构示意图;
26.图12为本实用新型实施例的清洗装置第二方向的结构示意图;
27.图13为本实用新型实施例的回收装置的结构示意图;
28.图14为本实用新型实施例的控制舱的结构示意图;
29.图15为本实用新型实施例的控制舱的分解图。
具体实施方式
30.下面根据附图图1~图15,给出本实用新型的较佳实施例,并予以详细描述,使能更好地理解本实用新型的功能、特点。
31.请参阅图1~图15,本实用新型实施例的一种船舶清洗装置,包括一机器人壳体1、四个行走机构2、一清洗装置3、一回收装置4和一控制舱5;行走机构2两两对应地连接于机器人壳体1的两侧,清洗装置3和回收装置4连接于机器人壳体1的底部;控制舱5固定于机器人壳体1内;行走机构2包括依次连接的一一段腿结构、一二段腿结构、一三段腿结构和一轮结构。
32.机器人壳体1包括一罩子11、一横撑板12、多个拉环13、多个挂钩14、多个拉环固定座15、多个上浮力材料16和多个下浮力材料17;横撑板12的两端分别通过螺接固定有一上浮力材料16和一下浮力材料17;横撑板12的两端设置有拉环固定座15;拉环13可转动地连接于拉环固定座15;罩子11的两端设置有挂钩14,挂钩14与拉环13配合;罩子11通过挂钩14和拉环13可拆卸地固定于横撑板12上;罩子11顶面中部形成一第一通孔;横撑板12的中部形成一第二通孔,第二通孔的外侧开设有一第三通孔。第一通孔用于高压水管及波纹管42自外部接入,横撑板12侧边开第三通孔用于波纹管42自机器人底部的回收罩41进入机器人舱内,使机器人整体更加整洁美观,同时避免高压水管34、电缆、波纹管42等对机器人的行走作业造成干扰。
33.一段腿结构包括一腿安装槽211、一一段腿架212、一扭力弹簧213、一槽内轴214、两第一手拧螺丝215、一十字杆216、两滑块217、一压缩弹簧218、一十字杆套筒219和一一段腿架支撑法兰板2110;腿安装槽211与横撑板12螺接固定;槽内轴214的两端通过第一手拧螺丝215固定于腿安装槽211内;扭力弹簧213和一段腿架212的第一端穿设于槽内轴214上,扭力弹簧213的中部固定于腿安装槽211内,扭力弹簧213两侧的弹簧臂穿插于一段腿架212内;一段腿架212的第二端两侧分别形成一第一滑槽,十字杆216的左右两端分别通过一滑块217可沿第一滑槽滑动地连接于第一滑槽;一段腿架支撑法兰板2110连接于十字杆216前方的一段腿架212的内侧,十字杆套筒219固定于一段腿架支撑法兰板2110的中部;十字杆216的前端穿设于十字杆套筒219内;压缩弹簧218套设于十字杆216的前端。
34.二段腿结构包括一二段腿架221、一二段腿架内轴222、两轴固定螺丝223、两轴套224、一u形架225和一二段腿架支撑法兰板;二段腿架内轴222的两端通过轴固定螺丝223固定于二段腿架221的内侧;u形架225可转动地穿设于二段腿架内轴222上,u形架225与二段腿架221之间的二段腿架内轴222上套设有轴套224;二段腿架221的第一端与一段腿架212的第二端枢接;u形架225的端部枢接于十字杆216上;二段腿架支撑法兰板连接于二段腿架221的第二端。
35.三段腿结构包括一三段腿架231、一限位轴232、一槽铝233、一开口销234、一第二手拧螺丝235和一腿轮连接架236;三段腿架231的顶部螺接固定于二段腿架支撑法兰板下;槽铝233通过限位轴232可转动地连接于三段腿架231内;限位轴232伸出三段腿架231的一端连接有开口销234;三段腿架231的一侧开设有一弧形槽,第二手拧螺丝235穿过弧形槽与槽铝233螺接;腿轮连接架236固定于槽铝233的底部。
36.轮结构包括一驱动电机241、一轮架242、两磁轮243、一传动带244、两同步带轮245和多个薄橡胶轮246;驱动电机241和磁轮243安装于轮架242上;轮架242连接于腿轮连接架236下;两磁轮243的转轴一端分别连接同步带轮245,驱动电机241的输出轴通过传动带244和同步带轮245与两磁轮243传动连接;磁轮243的两侧分别固定有一薄橡胶轮246。
37.清洗装置3包括一清洗盘31、多个z形安装架32、多个万向轮33、一高压水管34、一连接套35、一清洗头36、多个螺栓37和多个弹簧38;清洗盘31通过螺栓37固定于横撑板12下方,螺栓37外套设有弹簧38;清洗盘31的外表面沿周向均布连接有z形安装架32;z形安装架32的底端安装有万向轮33;清洗头36固定于清洗盘31内;高压水管34通过连接套35连接清洗盘31并与清洗头36连通;高压水管34自第二通孔和第一通孔穿出。
38.回收装置4包括一回收罩41、一波纹管42和多个辅助永磁块43;回收罩41固定于横撑板12下方并罩设于清洗盘31外;辅助永磁块43固定于回收罩41的底边;波纹管42一端与回收罩41连通,波纹管42的另一端自第三通孔和第一通孔穿出。
39.控制舱5包括一前端盖51、一后端盖52、两密封环53、一舱筒54、一控制舱安装座55、两抱箍56、若干水密插头57和一控制单元;前端盖51和后端盖52分别连接于舱筒54的两端,前端盖51与舱筒54之间和后端盖52与舱筒54之间设置有密封环53;控制单元设置于舱筒54内,水密插头57设置于后端盖52并与控制单元电连接;舱筒54通过套设于舱筒54外的抱箍56连接于控制舱安装座55上;控制舱安装座55固定于横撑板12上。
40.本实用新型实施例的一种船舶清洗装置,依靠磁轮243与辅助永磁块43吸附在壁面上,当机器人处于弯曲壁面时,一段腿架212下压扭力弹簧213,二段腿架221的转动使十字杆216向内推动压缩弹簧218,因此腿部可根据壁面曲率半径被动调节磁轮243的高度与翻转角度,三段腿结构与轮结构组合后安装在二段腿架支撑法兰板下,槽铝233可绕限位轴232在弧形槽内转动调整轮结构俯仰角,保证磁轮243始终与壁面贴合,驱动电机241安装在轮架242内,通过传动带244连接驱动电机241的输出轴与两磁轮243转轴上的同步带轮245,完成动力传递,实现机器人的行走,磁轮243两侧装有薄橡胶轮246,增加摩擦力,清洗装置3通过四根螺栓37安装在横撑板12下方,螺栓37上套有弹簧38,清洗盘31外均布四个z形安装架32,z形安装架32末端安装万向轮33,清洗盘31可随着壁面形状上抬、下压、倾斜,使清洗盘31始终与壁面相切,高压水流从高压水管34进入清洗头36,在水流冲击的反作用力下,清洗头36开始旋转冲刷船壁完成清洗作业,回收罩41通过顶部的四个孔位安装在横撑板12下
方,将清洗盘31包裹,高压射流冲刷吸附物后携带残渣流入回收罩41,通过回收罩41上接通的波形管中强大的真空吸力,将残渣废液吸收,机器人头部和尾部各安装两块上浮力材料16及两块下浮力材料17,使机器人可在水中作业,机器人的控制元件等安装在控制舱5内,控制舱安装座55通过沉头螺钉固定在横撑板12上,控制舱5摆放在控制舱安装座55上,抱箍56穿过控制舱安装座55中间槽孔后抱紧控制舱5,机器人各机构和装置安装完毕后,盖上罩子11,提起拉环13使其圆孔套入罩子11侧边槽内挂钩14,完成机器人的安装,人工将机器人放置在船舶壁面上,远程操作机器人开始行走进行清洗作业。
41.以上结合附图实施例对本实用新型进行了详细说明,本领域中普通技术人员可根据上述说明对本实用新型做出种种变化例。因而,实施例中的某些细节不应构成对本实用新型的限定,本实用新型将以所附权利要求书界定的范围作为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。