1.本实用新型涉及推进结构技术领域,特别是涉及一种用于水下机器人的推进结构。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种,根据专利申请号cn202121310466.3公开的一种水下机器人的推进结构还存在部分缺陷,而现有的水下机器人的推进结构安装效果较差,容易松动,造成造成水下机器人无法运作,其次,水下机器人的推进结构的推进效果不理想,动力不足。
技术实现要素:
3.针对上述问题,本实用新型提供了一种用于水下机器人的推进结构,通过将滑动架安装在方盒上的一号滑槽与二号滑槽内,推动滑动架,使夹板上的凹槽卡块与连接部件卡接,并且将卡杆也卡在相应的位置上,此时,再通过紧固组件中的栓杆和栓帽将滑动架拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件有多组,多组紧固组件固定,而螺栓将卡杆与连接部件固定,安装简便快捷,并且牢固,一号减阻叶可以降低推进器在水中的阻力,提高动力,此设置安装效果较强,不容易松动,避免了水下机器人正常运作;通过将二号减阻叶安装在推进器上,二号减阻叶与一号减阻叶作用相同,减小水阻,支架上的切割轮可以切除水草,避免水草缠绕在推进器上,而切割轮安装在转杆,通过推进器的前进动力使切割轮转动,而推进动力组件中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器的动力,防护栏避免水草与旋转叶缠绕,有一定的防护性,此设置推进效果理想,动力较强。
4.本实用新型的技术方案是:
5.一种用于水下机器人的推进结构,包括推进器,所述推进器的前端外表面固定安装有安装机构,所述推进器的两侧外表面固定连接有推进动力机构,所述安装机构包括方盒、一号滑槽、滑动架、夹板、凹槽卡块、卡杆、螺栓、二号滑槽、紧固组件与一号减阻叶。
6.上述技术方案的工作原理如下:
7.通过将滑动架安装在方盒上的一号滑槽与二号滑槽内,推动滑动架,使夹板上的凹槽卡块与连接部件卡接,并且将卡杆也卡在相应的位置上,此时,再通过紧固组件中的栓杆和栓帽将滑动架拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件有多组,多组紧固组件固定,而螺栓将卡杆与连接部件固定,安装简便快捷,并且牢固,一号减阻叶可以降低推进器在水中的阻力,提高动力,此设置安装效果较强,不容易松动,避免了水下机器人正常运作;通过将二号减阻叶安装在推进器上,二号减阻叶与一号减阻叶作用相同,减小水阻,
支架上的切割轮可以切除水草,避免水草缠绕在推进器上,而切割轮安装在转杆,通过推进器的前进动力使切割轮转动,而推进动力组件中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器的动力,防护栏避免水草与旋转叶缠绕,有一定的防护性,此设置推进效果理想,动力较强。
8.在进一步的技术方案中,所述一号滑槽位于方盒的上下两端外表面,所述滑动架位于一号滑槽与二号滑槽的内部,所述夹板位于滑动架的前端中部,所述凹槽卡块位于滑动架的前端外表面,所述卡杆位于凹槽卡块的两端外表面,所述螺栓位于卡杆的一端外表面,所述二号滑槽位于方盒的前端外表面,所述紧固组件位于滑动架的一端外表面,所述一号减阻叶位于夹板的两侧外表面。
9.安装机构安装效果较强,不容易松动,避免了水下机器人正常运作。
10.在进一步的技术方案中,所述一号滑槽通过机械设备开设在方盒的上下两端外表面,所述二号滑槽通过机械设备开设在方盒的前端外表面,所述滑动架滑动安装在一号滑槽与二号滑槽的内部,所述滑动架的前端中部与夹板的两端外表面焊接连接,所述滑动架的前端外表面与凹槽卡块的后端外表面焊接连接,所述凹槽卡块的两端外表面与卡杆的一端外表面焊接连接,所述螺栓通过栓孔安装在卡杆的一端外表面,所述紧固组件通过连接孔安装在滑动架的一端外表面,所述紧固组件的数量为六组。
11.通过将滑动架安装在方盒上的一号滑槽与二号滑槽内,推动滑动架,使夹板上的凹槽卡块与连接部件卡接,并且将卡杆也卡在相应的位置上,此时,再通过紧固组件中的栓杆和栓帽将滑动架拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件有多组,多组紧固组件固定,而螺栓将卡杆与连接部件固定,安装简便快捷,并且牢固。
12.在进一步的技术方案中,所述夹板的两侧外表面与一号减阻叶的一端外表面焊接连接。
13.一号减阻叶可以降低推进器在水中的阻力,提高动力。
14.在进一步的技术方案中,所述推进动力机构包括二号减阻叶、支架、切割轮、转杆、外盒、推进动力组件与防护栏,所述支架位于二号减阻叶的上端外表面,所述切割轮位于支架的上端外表面,所述转杆位于切割轮的中部,所述外盒位于二号减阻叶的前端外表面,所述推进动力组件位于外盒的内部,所述防护栏位于外盒的前端外表面。
15.推进动力机构推进效果理想,动力较强。
16.在进一步的技术方案中,所述二号减阻叶的上端外表面与支架的一端外表面焊接连接,所述切割轮通过转杆安装在支架的上端外表面。
17.通过将二号减阻叶安装在推进器上,二号减阻叶与一号减阻叶作用相同,减小水阻,支架上的切割轮可以切除水草,避免水草缠绕在推进器上,而切割轮安装在转杆,通过推进器的前进动力使切割轮转动。
18.在进一步的技术方案中,所述二号减阻叶的前端外表面与外盒的后端外表面焊接连接,所述推进动力组件固定安装在外盒的内部,所述防护栏通过连接螺丝安装在外盒的前端外表面,所述推进动力组件包括电机、旋转杆与旋转叶。
19.推进动力组件中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器的动力,防护栏避免水草与旋转叶缠绕,有一定的防护性。
20.本实用新型的有益效果是:
21.1、通过将滑动架安装在方盒上的一号滑槽与二号滑槽内,推动滑动架,使夹板上的凹槽卡块与连接部件卡接,并且将卡杆也卡在相应的位置上,此时,再通过紧固组件中的栓杆和栓帽将滑动架拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件有多组,多组紧固组件固定,而螺栓将卡杆与连接部件固定,安装简便快捷,并且牢固,一号减阻叶可以降低推进器在水中的阻力,提高动力,此设置安装效果较强,不容易松动,避免了水下机器人正常运作;通过将二号减阻叶安装在推进器上,二号减阻叶与一号减阻叶作用相同,减小水阻,支架上的切割轮可以切除水草,避免水草缠绕在推进器上,而切割轮安装在转杆,通过推进器的前进动力使切割轮转动,而推进动力组件中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器的动力,防护栏避免水草与旋转叶缠绕,有一定的防护性,此设置推进效果理想,动力较强。
22.2、安装机构安装效果较强,不容易松动,避免了水下机器人正常运作。
23.3、通过将滑动架安装在方盒上的一号滑槽与二号滑槽内,推动滑动架,使夹板上的凹槽卡块与连接部件卡接,并且将卡杆也卡在相应的位置上,此时,再通过紧固组件中的栓杆和栓帽将滑动架拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件有多组,多组紧固组件固定,而螺栓将卡杆与连接部件固定,安装简便快捷,并且牢固。
24.4、一号减阻叶可以降低推进器在水中的阻力,提高动力。
25.5、推进动力机构推进效果理想,动力较强。
26.6、将二号减阻叶安装在推进器上,二号减阻叶与一号减阻叶作用相同,减小水阻,支架上的切割轮可以切除水草,避免水草缠绕在推进器上,而切割轮安装在转杆,通过推进器的前进动力使切割轮转动。
27.7、推进动力组件中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器的动力,防护栏避免水草与旋转叶缠绕,有一定的防护性。
附图说明
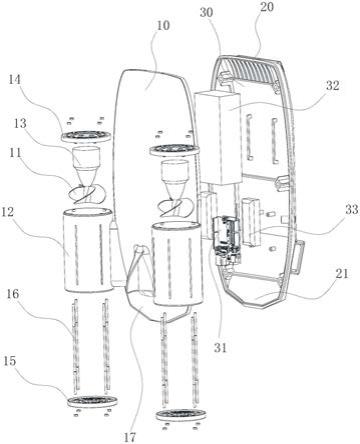
28.图1是本实用新型实施例图1的整体结构示意图;
29.图2是本实用新型实施例图1中安装机构的结构示意图;
30.图3是本实用新型实施例图1中推进动力机构的结构示意图;
31.图4是本实用新型实施例图3中切割轮的平视图;
32.图5是本实用新型实施例图1中推进动力机构的前视图。
33.附图标记说明:
34.1、推进器;2、安装机构;3、推进动力机构;201、方盒;202、一号滑槽;203、滑动架;204、夹板;205、凹槽卡块;206、卡杆;207、螺栓;208、二号滑槽;209、紧固组件;210、一号减阻叶;301、二号减阻叶;302、支架;303、切割轮;304、转杆;305、外盒;306、推进动力组件;307、防护栏。
具体实施方式
35.下面结合附图对本实用新型的实施例作进一步说明。
36.实施例一:
37.如图1-图5所示,一种用于水下机器人的推进结构,包括推进器1,推进器1的前端
外表面固定安装有安装机构2,推进器1的两侧外表面固定连接有推进动力机构3,安装机构2包括方盒201、一号滑槽202、滑动架203、夹板204、凹槽卡块205、卡杆206、螺栓207、二号滑槽208、紧固组件209与一号减阻叶210。
38.上述技术方案的工作原理如下:
39.通过将滑动架203安装在方盒201上的一号滑槽202与二号滑槽208内,推动滑动架203,使夹板204上的凹槽卡块205与现有技术中水下机器人的指定位置连接部件相卡接,并且将卡杆206也卡在相应的位置上,此时,再通过紧固组件209中的栓杆和栓帽将滑动架203拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件209有多组,多组紧固组件209固定,而螺栓207将卡杆206与现有技术中水下机器人的指定位置的连接部件固定,从而使整体结构安装简便快捷,并且牢固,一号减阻叶210可以降低推进器1在水中的阻力,提高动力,此设置安装效果较强,不容易松动,避免了水下机器人正常运作;通过将二号减阻叶301安装在推进器1上,二号减阻叶301与一号减阻叶210作用相同,减小水阻,支架302上的切割轮303可以切除水草,避免水草缠绕在推进器1上,而切割轮303安装在转杆304,通过推进器1的前进动力使切割轮303转动,而推进动力组件306中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器1的动力,防护栏307避免水草与旋转叶缠绕,有一定的防护性,此设置推进效果理想,动力较强。
40.在另外一个实施例中,如图2所示,一号滑槽202位于方盒201的上下两端外表面,滑动架203位于一号滑槽202与二号滑槽208的内部,夹板204位于滑动架203的前端中部,凹槽卡块205位于滑动架203的前端外表面,卡杆206位于凹槽卡块205的两端外表面,螺栓207位于卡杆206的一端外表面,二号滑槽208位于方盒201的前端外表面,紧固组件209位于滑动架203的一端外表面,一号减阻叶210位于夹板204的两侧外表面。
41.安装机构2安装效果较强,不容易松动,确保水下机器人正常运作。
42.在另外一个实施例中,如图2所示,一号滑槽202通过机械设备开设在方盒201的上下两端外表面,二号滑槽208通过机械设备开设在方盒201的前端外表面,滑动架203滑动安装在一号滑槽202与二号滑槽208的内部,滑动架203的前端中部与夹板204的两端外表面焊接连接,滑动架203的前端外表面与凹槽卡块205的后端外表面焊接连接,凹槽卡块205的两端外表面与卡杆206的一端外表面焊接连接,螺栓207通过栓孔安装在卡杆206的一端外表面,紧固组件209通过连接孔安装在滑动架203的一端外表面,紧固组件209的数量为六组。
43.通过将滑动架203安装在方盒201上的一号滑槽202与二号滑槽208内,推动滑动架203,使夹板204上的凹槽卡块205与连接部件卡接,并且将卡杆206也卡在相应的位置上,此时,再通过紧固组件209中的栓杆和栓帽将滑动架203拧紧固定,栓帽通过螺纹将栓杆固定,并且紧固组件209有多组,多组紧固组件209固定,而螺栓207将卡杆206与连接部件固定,安装简便快捷,并且牢固。
44.在另外一个实施例中,如图2所示,夹板204的两侧外表面与一号减阻叶210的一端外表面焊接连接。
45.一号减阻叶210可以降低推进器1在水中的阻力,提高动力。
46.实施例二:
47.在另外一个实施例中,如图3所示,推进动力机构3包括二号减阻叶301、支架302、切割轮303、转杆304、外盒305、推进动力组件306与防护栏307,支架302位于二号减阻叶301
的上端外表面,切割轮303位于支架302的上端外表面,转杆304位于切割轮303的中部,外盒305位于二号减阻叶301的前端外表面,推进动力组件306位于外盒305的内部,防护栏307位于外盒305的前端外表面。
48.推进动力机构3推进效果理想,动力较强。
49.在另外一个实施例中,如图3和图4所示,二号减阻叶301的上端外表面与支架302的一端外表面焊接连接,切割轮303通过转杆304安装在支架302的上端外表面。
50.将二号减阻叶301安装在推进器1上,二号减阻叶301与一号减阻叶210作用相同,减小水阻,支架302上的切割轮303可以切除水草,避免水草缠绕在推进器1上,而切割轮303安装在转杆304,通过推进器1的前进动力使切割轮303转动。
51.在另外一个实施例中,如图5所示,二号减阻叶301的前端外表面与外盒305的后端外表面焊接连接,推进动力组件306固定安装在外盒305的内部,防护栏307通过连接螺丝安装在外盒305的前端外表面,推进动力组件306包括电机、旋转杆与旋转叶。
52.推进动力组件306中的电机带动旋转杆转动,旋转杆带动旋转叶转动,旋转叶带动水并增加推进器1的动力,防护栏307避免水草与旋转叶缠绕,有一定的防护性。
53.以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。