1.本实用新型属于打磨设备应用技术领域,具体涉及一种4轴双工位同平面复杂曲线自动打磨专机控制系统。
背景技术:
2.目前铸件打磨设备主要采用的控制系统分3类:机床系统、plc系统、4轴机器人打磨专机。
3.机床系统对于打磨操作人员来说学习难度大、周期长,人员流失后重新招聘难度大。plc控制系统的打磨设备不能实现空间直线、空间圆弧等复杂轨迹,打磨产品种类有限,且不能方便的示教轨迹,应用范围窄。
4.现有的4轴机器人示教方便,精度高,但存在刚性差、价格昂贵、占地空间大等缺陷。
5.因此,基于上述问题,本实用新型提供一种4轴双工位同平面复杂曲线自动打磨专机控制系统。
技术实现要素:
6.实用新型目的:本实用新型的目的是提供一种4轴双工位同平面复杂曲线自动打磨专机控制系统,其设计合理,采用运动控制器和示教器结合的方式,通过示教器为操作工人提供简单友好的操作界面,实现复杂轨迹的示教,功能强大,操作便捷,结合硬件设计,采用特殊的高刚性机械结构,可实现重型打磨。
7.技术方案:本实用新型提供的一种4轴双工位同平面复杂曲线自动打磨专机控制系统,包括基板、运动控制器、交换机、x轴伺服控制器、y轴伺服控制器、a1轴伺服控制器、a2轴伺服控制器、主轴变频器和示教器;所述运动控制器、交换机、x轴伺服控制器、y轴伺服控制器、a1轴伺服控制器、a2轴伺服控制器、主轴变频器安装在基板上,其中,x轴伺服控制器、y轴伺服控制器、a1轴伺服控制器、a2轴伺服控制器、主轴变频器、示教器分别与交换机连接,交换机与运动控制器连接,通信协议为ethercat总线。
8.本技术方案的,所述示教器用于程序保存、新建并可通过u盘导入或导出。
9.本技术方案的,所述主轴变频器为可调速主轴变频器,用来驱动打磨工具旋转并调节转速。
10.本技术方案的,所述运动控制器负责机床整体工作逻辑的控制、轨迹控制,示教器提供操作工人友好的操作界面,示教器的功能包括但不限于可点动控制各轴运动、具有选型、产量统计、故障信息显示,交换机负责以太网通信的中转。
11.本技术方案的,所述运动控制器通过以太网通信组成一体化的以太网协议的控制系统,运动控制器、x轴伺服控制器、y轴伺服控制器、a1轴伺服控制器、a2轴伺服控制器通过ethercat协议组成高动态高灵敏度的轨迹插补运动系统;所述a1轴伺服控制器、a2轴伺服控制器控制两个工位同步运动,实现单台设备两个工位高精度实时同步工作。
12.本技术方案的,所述4轴双工位同平面复杂曲线自动打磨专机控制系统,还包括设置在基板上且与运动控制器连接的带接口控制器扩展板。
13.本技术方案的,所述4轴双工位同平面复杂曲线自动打磨专机控制系统,还包括与基板相配合使用的电气柜外壳,基板安装在电气柜外壳内。
14.与现有技术相比,本实用新型的一种4轴双工位同平面复杂曲线自动打磨专机控制系统的有益效果在于:其设计合理,采用运动控制器和示教器结合的方式,具有高负载、高动态响应和高精度的特性,示教器为操作工人提供简单友好的操作界面,实现复杂轨迹的示教,功能强大,操作便捷,结合硬件设计,采用特殊的高刚性机械结构,可实现重型打磨,解决了目前市面上关于打磨设备操作简便、功能强大、刚性高、打磨速度快、精度高的需求痛点问题,双工位联动可一次加工2个工件,极大提高了生产效率和经济效益。
附图说明
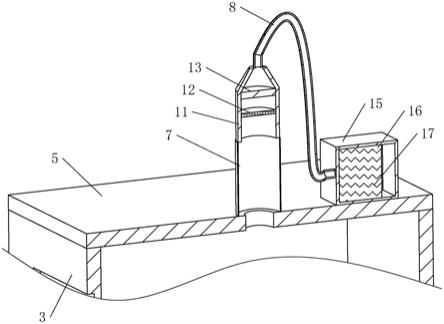
15.图1是本实用新型的一种4轴双工位同平面复杂曲线自动打磨专机控制系统的结构示意图;
16.图2是本实用新型的一种4轴双工位同平面复杂曲线自动打磨专机控制系统的示教器的结构示意图;
17.图3是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的系统网络互联图;
18.图4是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的系统互联图;
19.图5、图6是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的系统动力回路原理图;
20.图7是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的系统安全回路原理图;
21.图8是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的运动控制器、示教器和交换机的供电原理图;
22.图9是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的ethecat伺服电机原理图;
23.图10是本实用新型的一种新型4轴双工位同平面复杂曲线自动打磨专机控制系统的主轴变频原理图。
具体实施方式
24.下面结合附图和具体实施例,进一步阐明本实用新型。
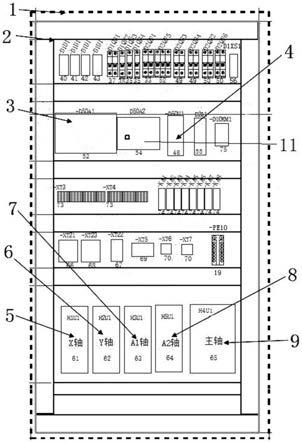
25.如图1和图2所示的一种4轴双工位同平面复杂曲线自动打磨专机控制系统,包括基板2、运动控制器3、交换机4、x轴伺服控制器5、y轴伺服控制器6、a1轴伺服控制器7、a2轴伺服控制器8、主轴变频器9、示教器10和控制器扩展板11;
26.运动控制器3、交换机4、x轴伺服控制器5、y轴伺服控制器6、a1轴伺服控制器7、a2轴伺服控制器8、主轴变频器9和控制器扩展板11安装在基板2上,其中,x轴伺服控制器5、y轴伺服控制器6、a1轴伺服控制器7、a2轴伺服控制器8、主轴变频器9、示教器10分别与交换
机4连接,交换机4与运动控制器3连接,通信协议为ethercat总线。
27.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统,示教器10用于程序保存、新建并可通过u盘导入或导出。
28.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统,主轴变频器9为可调速主轴变频器,用来驱动打磨旋转并调节打磨工具转速。
29.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统,运动控制器3负责机床整体工作逻辑的控制、轨迹控制(型号为d50a1),示教器10提供操作工人友好的操作界面,示教器10的功能包括但不限于可点动控制各轴运动、具有选型、产量统计、故障信息显示,交换机4负责以太网通信的中转。
30.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统,运动控制器3通过以太网通信组成一体化的以太网协议的控制系统,运动控制器3、x轴伺服控制器5、y轴伺服控制器6、a1轴伺服控制器7、a2轴伺服控制器8通过ethercat协议组成高动态高灵敏度的轨迹插补运动系统,主轴转速可通过主轴变频器9单独调节;a1轴伺服控制器7、a2轴伺服控制器8控制两个工位同步运动,实现单台设备两个工位高精度实时同步工作。
31.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统优选的,还包括设置在基板2上且与运动控制器3连接的带接口控制器扩展板11。
32.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统优选的,还包括与基板2相配合使用的电气柜外壳1,基板2安装在电气柜外壳1内。
33.运动控制器3作为加工逻辑运算单元,工件安装、转运、夹紧、抬升等动作均由其直接实现;示教器10作为用户操作盒设计的基础窗口,可选择产品型号、设置运行速度、查看系统报警、监控产量、监控主轴运行状态、查看报警等;运动控制器和示教器之间通过交换机进行ethenet通讯,稳定可靠,到轨迹加工步骤,打磨轨迹由运动控制器3控制器控制4台伺服组成的双工位机构,运动控制器3和示教器10硬件均连接至同一交换机,通过ethenet协议来实现交互,可以方便的示教、保存轨迹。
34.运动控制器3选用以太网接口,接线少、调试方便、通信速度快,运动控制器3采集的传感器和控制电磁阀选用24v,在安全电压以下,保证设备安全性;运动控制器3通过百兆网线连接至工业交换机4,作为设备的cpu,设备主控逻辑由其运行,各个运动机构的协调和互锁等安全功能也由其实现,信息的集中处理也由其完成。
35.示教器10是设备最主要的交互接口,选用专用触摸屏,美观大方,接口采用以太网口,通过百兆网线连接至交换机4,示教器10和运动控制器通过以太网硬件通信,底层协议为moudbus_tcp,触摸屏可选择产品型号、监控设备运行状态、查看设备报警信息,监控工具寿命,操作和示教等。
36.x轴伺服控制器5、y轴伺服控制器6、a1轴伺服控制器7和a2轴伺服控制器8选用ethercat接口,通用性好、信息传输速度快,配合带有ethercat接口的运动控制器3,组成高速稳定的4轴运动系统,ethercat接口可有效减少系统接线量,大大降低故障率,运动控制器3通过百兆网线连接至交换机4,通信速率高,运行稳定。
37.x轴伺服控制器5和y轴伺服控制器6可完成各种复杂形状的平面轨迹运动,a1和a2两个工位可同时加工2件产品、效率较高,主轴变频器9调节工具转速,提高打磨质量、速度,延长工具寿命。
38.运动控制器3配备示教器10,示教器10通过网线连接至机器人控制器3,可方便快捷的示教新的轨迹,大大提高设备兼容性和生产效率。
39.本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统,整体主通讯架构全部采用以太网协议,速率高、运行稳定,各个运动机构间连锁运动,协调动作,可达到极高的生产效率。
40.图3至图10是本结构的4轴双工位同平面复杂曲线自动打磨专机控制系统的电气原理图。
41.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。